1. 时间同步的重要性
汽车电子等嵌入式系统中,RTC 时间同步的核心作用是实现多 ECU / 多设备的时间统一与事件溯源 ,保障系统协同工作的准确性、可追溯性和安全性。
汽车上分布着数十个 ECU(如 VCU、BCM、ADAS 控制器、娱乐系统等,不同的控制器,对精度的要求是不同的),每个 ECU 都有本地 RTC,但受晶振漂移、温度变化影响,本地时间会逐渐产生偏差。
- 若没有时间同步,不同 ECU 记录的同一事件(如踩刹车、车门解锁)会出现时间戳不一致的情况。
- 同步后,所有 ECU 以 CAN 网络的全局时间为基准,确保同一事件在各 ECU 中的时间戳完全对齐 ,支撑跨 ECU 的协同功能:
- 例如 ADAS 系统的传感器数据融合:摄像头、雷达、激光雷达的检测数据需基于统一时间戳才能准确匹配,实现目标识别与跟踪;
- 例如整车能量管理:VCU、BMS、MCU 需同步时间,精准控制充放电时机、电机启停逻辑。
- 同时DTC故障的发生具体时间也可以被记录下来,用于后续问题排查。
2. RTC时间与网络时间概念
在 AUTOSAR 架构中,RTC(Real-Time Clock,实时时钟)和 CAN 总线上传输的时间(通常是网络时间)是两个不同的时间,但是在开发中,会经常遇到RTC时间需要同步网络时间,二者的定位和作用不同:
- RTC(实时时钟) :属于本地硬件时间,通常是外部 RTC 芯片(这个芯片独立供电)提供,用于记录本地的真实时间(年、月、日、时、分、秒),ECU的休眠唤醒断电均不影响这个时间。
- CAN 总线上的时间 :属于网络全局时间,通常由总线上的「时间主节点(Time Master)」生成并广播,其他节点(Time Slave)接收该时间,用于实现多 ECU 之间的时间协同(如事件同步、数据采集时间戳对齐等)。对于每个供应商来说,大家只需要从TM中取到时间信号,传输到自己的模块中去使用即可。
最终:让本地RTC时间 = CAN 网络上的时间。
3. 时间同步(不涉及时间精度)
3.1 触发方式
两种触发方式:
- 周期性同步网络时间。(例如1个小时同步一次,时间间隔不可太小。)
- 事件性同步网络时间。(例如ECU休眠唤醒,常用)
不可同步太频繁,否则会导致 RTC 时间频繁波动,影响故障时间戳的准确性。
3.2 接收链路
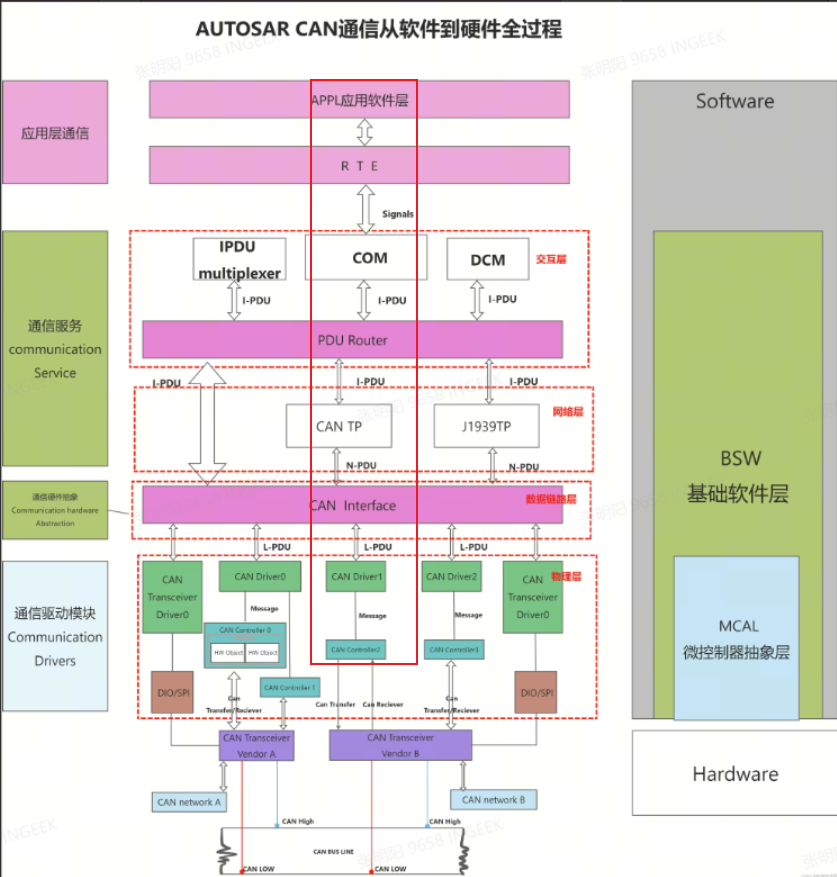
CanDrv-> CanIf -> CanTp -> PduR -> Com ->Rte 链路,将时间数据解析后传递给本地 RTC处理模块。属于传统的应用报文接收方式。
3.3 同步具体步骤
1. 检查CAN网络是否被唤醒(只在唤醒时同步)
2. 检查是否接收到CAN网络上时间同步的报文(需要设置标志位,代表同步报文已接收)
3. 检查只同步一次时间的标志位是否被置上(需要不被置上,代表没有同步)
4. 从RTE接口中获取到CAN报文上的(年、月、日、时、分、秒)
5. 获取本地RTC设置的时间。
6. 本地RTC与网络时间进行对比,同步,补偿。
7. 将同步,补偿后的时间设置成本地RTC时间。
4. 常用的接口
| 接口 | 定义 |
|---|---|
| Gpt_GetGlobalTimeStamp | 获取本地RTC时间 |
| Gpt_SetGlobalTimeStamp | 设置本地RTC时间 |
5. 注意事项
- 调用Gpt_SetGlobalTimeStamp时,必须先停止 RTC 计数器,再写入时间,RTC_StopTimer() → 写入时间 → RTC_StartTimer()。
- 严禁在初始化其他的地方调用 RTC_Init()。
- 同步时间之前需要进行时间合理性检查,不可月份大于12,天数大于31,小时大于24等。
- 本地要设置RTC的初始化时间,虽然不够真实,但是设置了不影响程序的功能,总得给个初始值吧!
- 不可周期同步太频繁。
- 时间同步时,可以补偿一些时间,因为CAN总线上的时间与APP层接收的时间不可能完全一致。
6. CanTsyn模块的作用
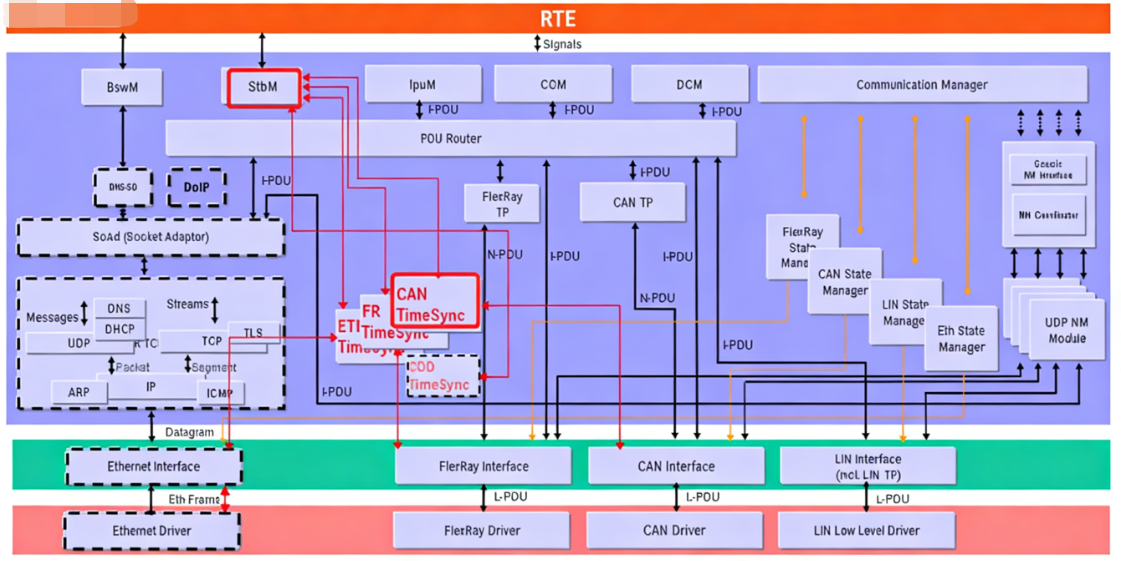
从上图中可以看到CAN Time Sync位于 PDU Router 与 CAN IF 之间。
从CANIF层接收CAN上的时间戳,由StbM去管理。
CanTsyn 就相当于是 CAN 网络的 "时钟校准器",解析同步报文、计算延迟偏移、动态校准时钟。
7. 时间同步过程
这个图在网上还是有点难以理解的,我个人理解是这样的。
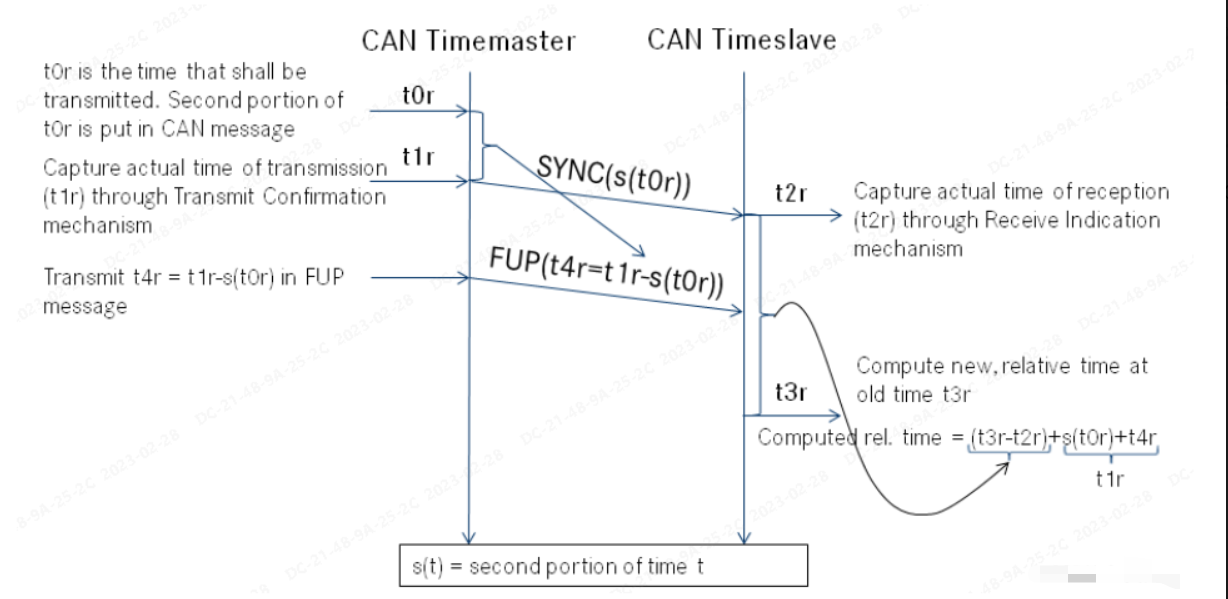
- 现在从模块TS要同步主模块TM(公can)的t0r时间。假如没有任何延迟,从模块TS真实的时间就是t0r。
- 但是回归现实,主模块真正发出去的时间点是t1r,主模块这边的 延迟时间是t1r-t0r.
- 假如从模块TS收到这个时间没有任何延迟。从模块TS真实时间应该就是,t0r+(t1r-t0r 延迟时间)=t1r
- 上图中会把时间同步分成两次,一次SYNC ,一次FUP。先不管流程。
- t2r是开始接收时间没问题吧,t3r是两次数据接收完毕的时间没问题吧!
- t3r-t2r这个是从模块接收完整花费的时间吧!
- 所以真实的时间就是:主模块的起始时间t0r+主模块的延迟时间t1r-t0r,再加从模块延迟接收的时间t3r-t2r。
8. 时间同步报文格式
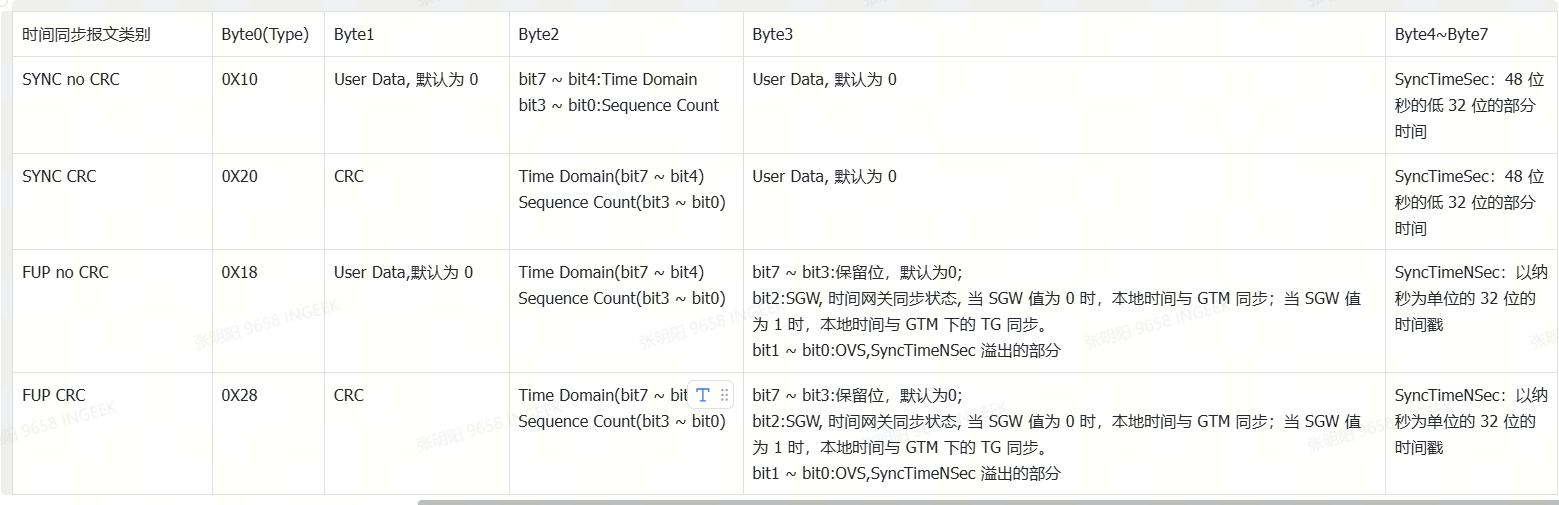
8.1 SYNC and FUP Message
SYNC Message 与 FUP Message的报文格式,这两类报文应成对存在,DLC为8,两类报文都共用同样一个CAN ID。
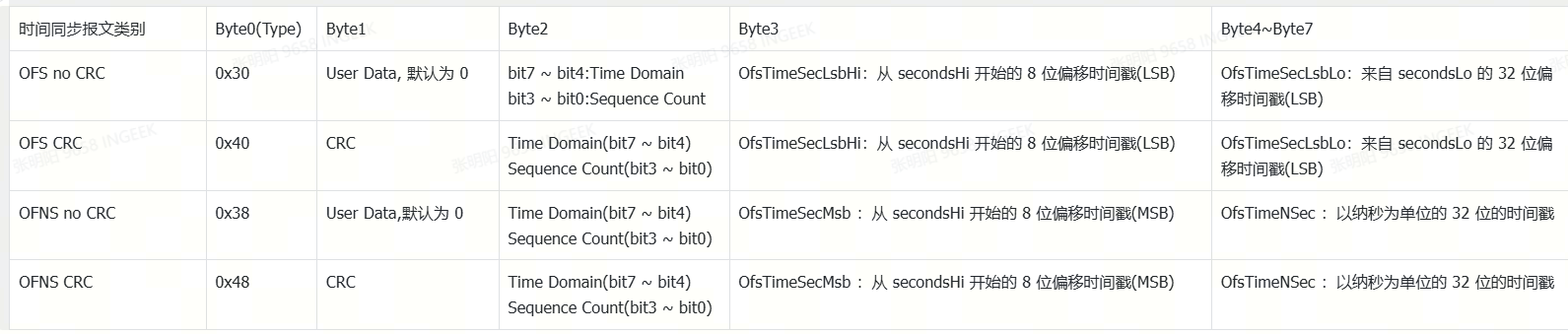
8.2 OFS and OFNS
Offset Message中的OFS 与OFNS Message的报文格式,这两类报文应成对存在,DLC为8,两类报文都共用同样一个CAN ID。

总结
以上内容纯个人学习使用!