
一、项目背景与通讯痛点
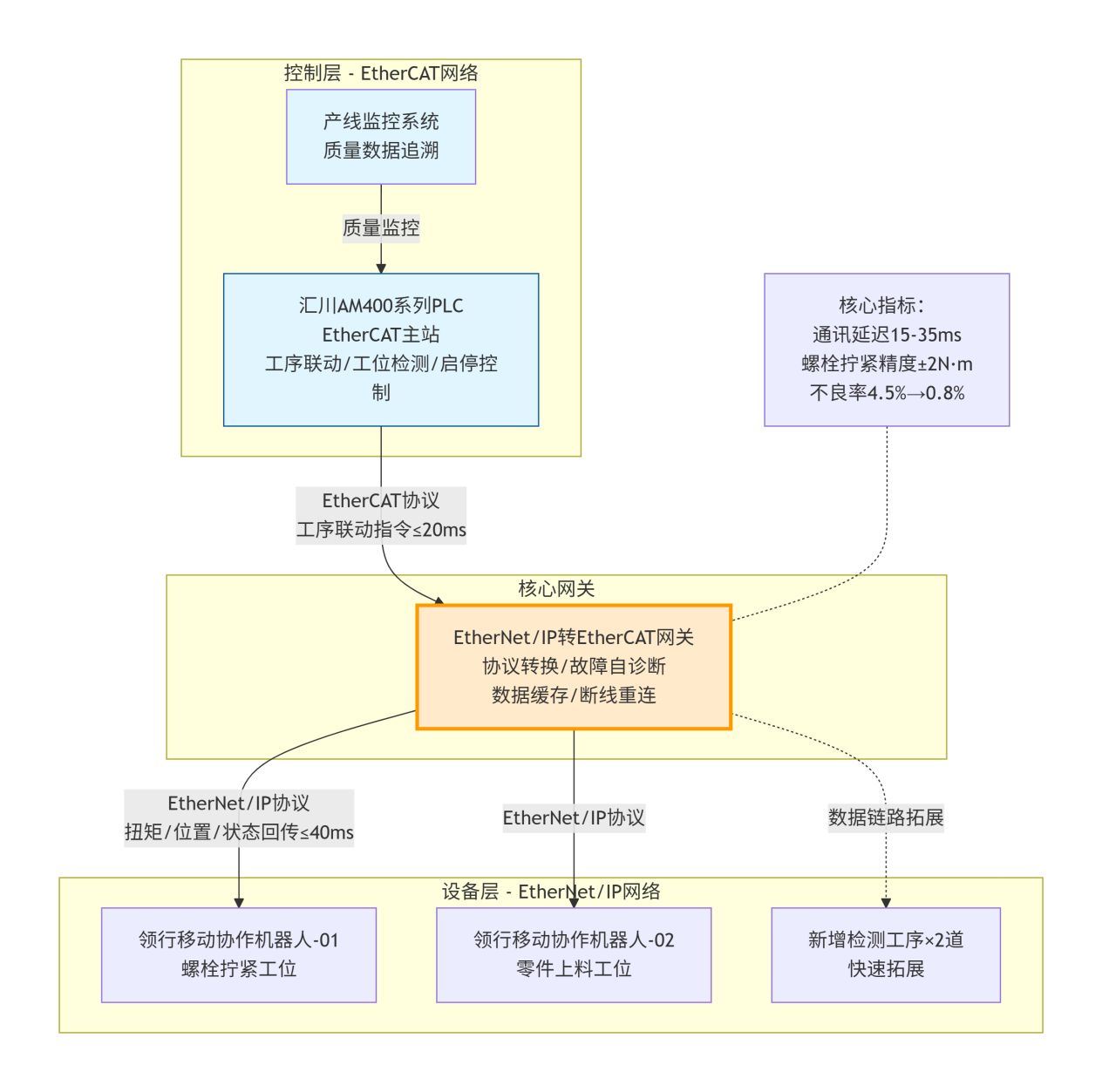
某汽车零部件企业升级发动机装配产线,引入领行 EtherNet/IP 协议移动协作机器人,负责发动机螺栓拧紧、零件上料等工序;产线控制核心采用汇川 AM400 系列 EtherCAT 协议 PLC,承担产线工序联动、工位检测、设备启停控制。因机器人与 PLC 协议不兼容,原有机器人与产线手动联动的方式,工序衔接耗时久,螺栓拧紧精度易受人为影响,且无法实现机器人作业数据与产线质控数据的实时同步,产品不良率居高不下。企业核心要求:实现跨协议实时通讯,机器人作业参数、工位状态数据回传≤40ms,PLC 工序联动指令下发≤20ms,适配装配产线高精度、高协同的作业要求,支持产线工序拓展。
二、设备协同通讯体系构建: 网关模块 实现机器人与 PLC 精准联动
围绕汽车零部件装配产线的高精度协同需求,以 EtherNet/IP 转 EtherCAT 协议转换网关 为核心,构建领行机器人 与汇川 PLC 的专属协同通讯体系,实现二者的高速数据交互与精准指令联动,适配产线高节拍、高质量的作业特点。网关作为机器人与 PLC 之间的 "通讯桥梁",双向对接两大协议网络,一端采集机器人螺栓拧紧扭矩、作业位置、运行状态等关键工序数据,保障质控数据的实时采集与完整传输;另一端与汇川 PLC 的EtherCAT 总线互联,实现 PLC 工序联动指令的高速下发,让机器人动作与产线工序精准匹配,消除手动联动的衔接误差。针对装配产线的质控需求,网关配置故障自诊断与断线重连机制,通讯异常时可快速触发报警并向 PLC 发送故障信号,PLC 自动暂停产线,从源头避免不良品产生;同时支持关键作业数据本地缓存,通讯恢复后自动补传,保障质控数据的连续性。网关的工业级抗干扰设计,可适配车间变频器、伺服设备密集的电磁环境,为产线连续生产提供稳定通讯保障。

三、项目落地效果
协同精度提升: 跨协议通讯延迟稳定在 15-35ms,机器人作业参数实时同步至 PLC,PLC 工序联动指令精准下发,螺栓拧紧精度误差控制在 ±2N・m,产品装配不良率从 4.5% 降至 0.8%;
生产效率优化:产线工序衔接时间缩短 60%,单台发动机装配周期从 20 分钟降至 12 分钟,产线日产能提升 50%;
运维便捷高效 :工业网关自带可视化状态监控界面,可实时查看通讯链路运行情况,故障排查时间从 1.5 小时缩短至 8 分钟,产线停机率降低 70%;
扩展适配性强:后期产线新增 2 道检测工序,仅在网关中完成数据链路拓展,即可实现机器人与新工序设备的联动,无需重构产线通讯网络。
四、价值总结
本方案通过构建以协议转换网关 为核心的设备协同通讯体系,解决了汽车零部件装配产线中领行机器人 与汇川 PLC的跨协议通讯难题,实现了产线设备的高精度、高协同作业。方案无需专业协议调试经验,部署便捷、改造成本低,同时兼顾质控与扩展需求,为汽车制造、机械装配等高精度装配产线的自动化升级,提供了实用的跨协议通讯落地方案。