目录

1.摘要
本文研究异构多点动态聚合(MPDA)多机器人任务分配问题,针对现有方法多假设机器人和任务同构的不足,提出一种考虑不同类型机器人及任务依赖关系的异构MPDA模型,并设计多阶段粒子群算法通过多阶段策略缩小搜索空间,并结合连续速度更新与离散位置更新的混合机制优化任务分配。实验结果表明,该方法在效率和性能上优于现有先进方法。
2.异构多点动态聚合
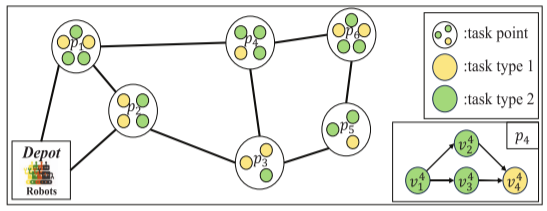
异构多点动态聚合(HeMPDA)问题表示在地图上存在 L L L 个任务点,每个任务点包含若干具有前后依赖关系的任务,并用有向无环图表示。机器人从仓库 p 0 p_0 p0 出发,在图 G ( P , E ) G(P, E) G(P,E) 上移动执行任务。每个任务可能包含多种类型的需求,需求随时增长:
q i m ( t ) = q i m ( 0 ) + r i m × t q_i^m(t) = q_i^m(0) + r_i^m \times t qim(t)=qim(0)+rim×t
当机器人执行任务时,其能力会降低任务需求;任务完成时间由所有需求完成时间决定:
c t i = max m ∈ { 1 , ... , M T } c t i m ct_i = \max_{m \in \{1, \ldots, MT\}} ct_i^m cti=m∈{1,...,MT}maxctim
机器人具有多种能力 a k m a_k^m akm,不同类型机器人能力不同,可协同完成任务。问题目标是最小化所有任务的最终完成时间:
min max i ∈ { 1 , ... , N } c t i \min \max_{i \in \{1, \ldots, N\}} ct_i mini∈{1,...,N}maxcti
机器人路径由二进制变量 λ i j k \lambda_{ij}^k λijk 表示(机器人 k k k 是否从任务 i i i 到任务 j j j)。机器人到达任务时间由前一任务完成时间和旅行时间决定:
a t j k = ∑ i = 0 N ( d t i k + t i j ) λ i j k at_j^k = \sum_{i=0}^{N} (dt_i^k + t_{ij}) \lambda_{ij}^k atjk=i=0∑N(dtik+tij)λijk
任务需求满足关系为:
q j m ( 0 ) + r j m c t j m = ∑ i = 0 N ∑ k = 1 M λ i j k a k m ( c t j m − min ( c t j m , a t j k ) ) q_j^m(0) + r_j^m ct_j^m = \sum_{i=0}^{N} \sum_{k=1}^{M} \lambda_{ij}^k a_k^m (ct_j^m - \min(ct_j^m, at_j^k)) qjm(0)+rjmctjm=i=0∑Nk=1∑Mλijkakm(ctjm−min(ctjm,atjk))
解表示方案
在 HeMPDA 中,一个解表示为可变长度的事件序列:
s o l = e v e n t 1 , e v e n t 2 , ... , e v e n t d sol=event_1,event_2,\\ldots,event_d sol=event1,event2,...,eventd
每个事件由四个元素组成:
e v e n t e = ( r o b e k , ν e i , t e , S e ) event_e=(rob_{ek},\nu_{ei},t_e,S_e) evente=(robek,νei,te,Se)
其中 r o b e k rob_{ek} robek表示执行任务的机器人, ν e i \nu_{ei} νei表示任务, t e t_e te为事件发生时间, S e S_e Se为事件类型 ( S e = 1 (S_e=1 (Se=1表示机器人到达任务并开始执行, S e = 0 S_e=0 Se=0表示机器人离开任务)。
3.多阶段粒子群算法
多阶段粒子群算法(MSPSO)首先通过迭代局部搜索生成初始全局解并初始化粒子,随后采用混合更新机制和局部搜索不断优化解。为降低复杂
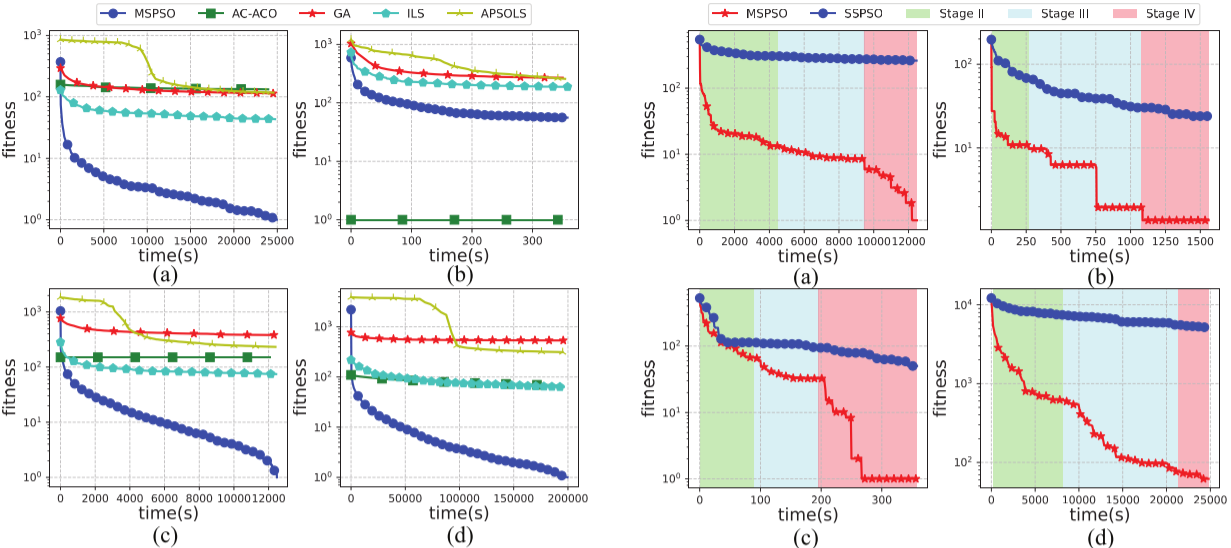
搜索空间,算法设计多阶段策略,通过任务点约束和协作约束暂时缩小搜索空间,使规模由 ( N ! ) M (N!)^M (N!)M降至 ( L ! ) ∏ l = 1 L ( N l ! ) M ˉ (L!)\\prod_{l=1}\^L(N_l!)^{\bar{M}} (L!)∏l=1L(Nl!)Mˉ。随后通过四个阶段逐步放宽约束:先让所有机器人组成一个团队,再划分为多个团队,然后取消任务点约束,最后取消协作约束,使机器人完全自由调度。阶段之间按时间或停滞情况切换,并重新初始化粒子,同时保留全局最优 g b gb gb和个体最优 p b pb pb以延续搜索信息。
编解码方案
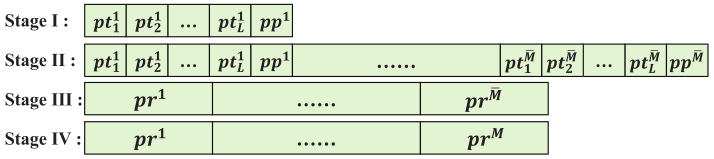
在 MSPSO 中,粒子位置 x i x_i xi需要解码为机器人 (或团队)的任务执行路径进行评价。不同阶段采用不同编码方式:阶段I和II使用间接编码, x i = p t 1 k , ... , p t L k , p p k x_i=pt_1\^k,\\ldots,pt_L\^k,pp_k xi=pt1k,...,ptLk,ppk,其中 p p k pp_k ppk 表示任务点访问顺序, p t l k pt_l^k ptlk表示该任务点内的任务执行序列;阶段 III 取消任务点约束, x i = p r 1 , ... , p r M ˉ x_i=pr_1,\\ldots,pr_{\\bar{M}} xi=pr1,...,prMˉ直接表示各团队路径;阶段 IV 进一步取消协作约束,直接表示每个机器人的路径。对于阶段I和II,需要根据 p p k pp_k ppk对各任务点序列 p t l k pt_l^k ptlk排序生成路径 p r k pr_k prk,再重新编号任务进行评价。
粒子更新
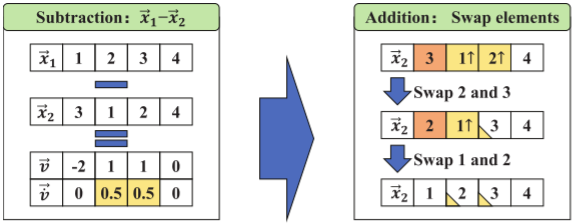
为适应排列形式编码,MSPSO 设计了混合更新机制,包括速度更新和位置更新。速度更新:
v i d = w v i d + c 1 ( p i b d − x i d ) + c 2 ( g d − x i d ) v_i^d=wv_i^d+c_1(p_i^{bd}-x_i^d)+c_2(g^d-x_i^d) vid=wvid+c1(pibd−xid)+c2(gd−xid)
为增强局部搜索能力,算法对当前全局最优解采用两元素交换的局部搜索策略,并根据不同阶段在任务点顺序、任务执行顺序或机器人路径上进行邻域搜索。多阶段策略通过临时加入和逐步移除约束,使算法先在缩小的可行空间中快速找到可行解,再逐渐扩展搜索范围,从而提高搜索效率。
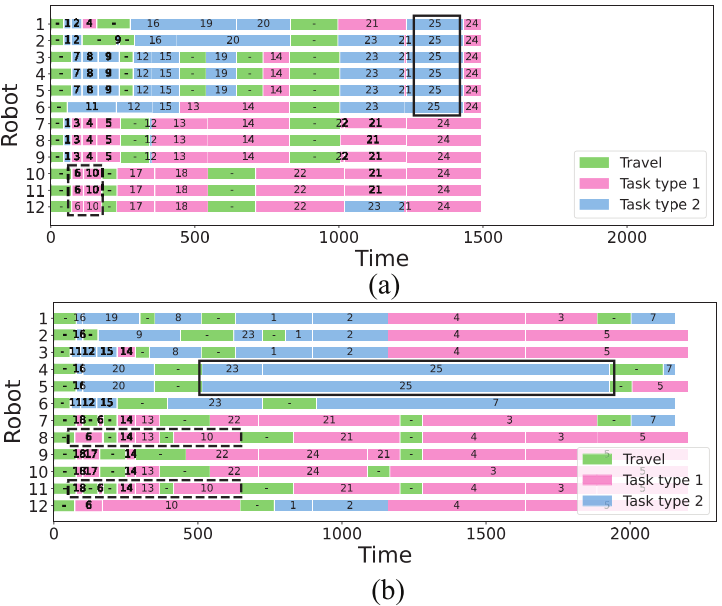
4.结果展示
5.参考文献
1 Dai S H, Jia Y H, Chen W N, et al. Multistage particle swarm optimization for heterogeneous multipoint dynamic aggregationJ. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2025.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx