摘要: 在重载 AGV 频繁执行跨层搬运任务的工厂环境中,电梯指令的原子性与确定性是架构设计的生命线。如何避免多台重载机器人在同一时间抢占有限的电梯资源?如何解决重型电机启停瞬间产生的浪涌对通讯电平的物理冲击?本文将深度剖析基于 鲁邦通 EC6200机器人梯控产品 的边缘中台设计。通过解构 agv机器人梯控 的逻辑状态机、消息幂等性设计以及分布式互斥锁,我们展示了如何在边缘侧实现具备"工业级确定性"的业务闭环。
导语: 在迈向工业 4.0 的黑灯工厂实战中,底层通讯的微小抖动都会被物理环境放大为严重的生产事故。鲁邦通 通过 EC6200机器人梯控产品 提供的边缘自治能力,将复杂的电梯底层协议抽象为标准化的数字接口。这不仅是通讯方式的革新,更是对 agv机器人梯控 健壮性与实时性的深度底层重构。
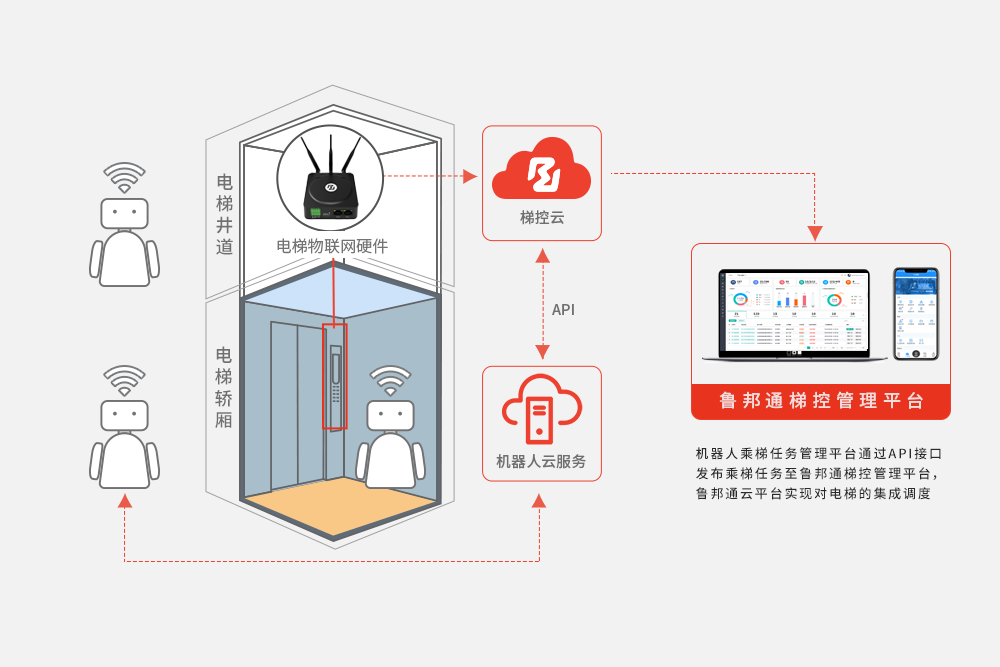
重构工业垂直交通枢纽:利用分布式调度算法与硬件隔离技术打破重载搬运的效率瓶颈

工业现场的严酷考验:重载场景对梯控架构的极限要求
在进行重载 agv机器人梯控 系统设计时,架构师必须直面以下三个层面的技术阻碍:
- 物理层的电磁风暴(EMI/EMC) :重工业货梯通常配备大功率变频曳引机,其启停瞬时产生的浪涌电压会通过共模干扰倒灌入通讯线缆。若网关缺乏物理层的磁隔离保护,会导致严重的 bit 位翻转,触发错误的呼梯指令。
- 通讯层的异步性与延迟抖动 :工厂 4G/WiFi 环境受钢结构遮挡严重。在机器人进入金属轿厢的一瞬间,通讯极易中断。架构必须能够处理这种"连接空洞",确保指令的最终一致性。
- 应用层的资源竞态(Resource Contention) :电梯是典型的临界资源。当 A 线重载机器人(高优先级)与 B 线普通机器人并发请求时,若缺乏全局仲裁机制,会导致电梯逻辑死锁或响应延迟。
架构重构:基于"边缘自治+云端编排"的协同模型
针对上述挑战,我们推荐在 鲁邦通 硬件底座上构建声明式(Declarative)的控制架构:
第一段: 边缘侧的状态机监控与本地化闭环。网关不只是转发数据的管道,而是实时维护电梯物理状态的数字孪生体。通过对开门限位开关、平层感应器信号的毫秒级轮询,确保在向调度系统反馈信号时,电梯绝对处于物理平稳状态,从而保障 agv机器人梯控 流程的万无一失。
第二段: 硬件层的深度电气隔离防护。针对重型设备频繁启停的工况,鲁邦通 硬件在电源输入与串口通讯端实施了彻底的物理隔离设计。这种工业级的硬件防护,确保了 agv机器人梯控 核心逻辑在极端电压波动下依然能保持 7x24 小时的稳定运行,不掉线、不宕机。
第三段: 基于 MQTT 协议的高可靠指令集设计。为了解决网络抖动,我们利用了具备 QoS 1 特性的消息服务。即使指令下发时网络瞬时闪断,网关在恢复连接后也会通过重传机制确保指令被执行。这种异步协同极大提升了 agv机器人梯控 在复杂环境下的容错能力。
核心代码实战:具备生产强度的并发调度算法实现
以下代码展示了如何利用 鲁邦通 边缘网关的 API,在调度系统中实现一套具备异常容错、优先级调度与分布式锁特性的 agv机器人梯控 逻辑。
Python
import time
import json
import uuid
import logging
from threading import Lock
# 配置工业级日志体系
logging.basicConfig(level=logging.INFO, format='%(asctime)s - [GATEWAY_LOG] - %(message)s')
class HeavyDutyElevatorOrchestrator:
def __init__(self, device_id):
self.device_id = device_id
self.mutex = Lock() # 本地资源互斥锁
self.current_session = None
self.is_busy = False
self.heartbeat_last_seen = time.time()
def handle_request(self, robot_id, target_floor, priority):
"""处理来自不同重载机器人的并发呼梯请求,体现 agv机器人梯控 的调度逻辑"""
with self.mutex:
if not self.is_busy:
return self._allocate_resource(robot_id, target_floor)
elif priority > 8: # 设定高优先级抢占阈值
logging.warning(f"High-priority PREEMPTION: Robot {robot_id} is taking over.")
return self._allocate_resource(robot_id, target_floor)
else:
logging.info(f"Elevator BUSY: Robot {robot_id} added to queue.")
return False
def _allocate_resource(self, robot_id, target_floor):
"""执行底层指令下发至 鲁邦通 边缘网关"""
self.is_busy = True
self.current_session = {
"session_id": str(uuid.uuid4()),
"robot": robot_id,
"target": target_floor,
"start_time": time.time()
}
# 构建符合 鲁邦通 规范的 JSON 指令报文
command_payload = {
"req_id": self.current_session["session_id"],
"method": "GO_TO_AND_LOCK_OPEN",
"params": {"floor": target_floor, "timeout": 120}
}
# 模拟通过 MQTT 下发至 鲁邦通 硬件
print(f"PUBLISHING COMMAND: {json.dumps(command_payload)}")
return True
def release_resource(self, robot_id):
"""任务完成后的资源释放,保障 agv机器人梯控 的后续流转"""
with self.mutex:
if self.current_session and self.current_session["robot"] == robot_id:
logging.info(f"RESOURCE RELEASED by {robot_id}")
self.is_busy = False
self.current_session = None
# 模拟重载 AGV 跨层调度流转
if __name__ == "__main__":
orchestrator = HeavyDutyElevatorOrchestrator("ROBUSTEL_EDGE_E1")
# 场景:重载机器人 A1 请求前往 5 楼执行搬运任务
if orchestrator.handle_request("HEAVY_AGV_A1", 5, priority=9):
# 模拟机器人正在跨层...
time.sleep(2)
# 任务完成后释放电梯资源
orchestrator.release_resource("HEAVY_AGV_A1")方案的工程化优势:为何是工业全自动化场景的优选?
- 极高的 MTBF(平均无故障运行时间) :鲁邦通 采用工业级元器件选型。在 CSDN 技术圈关注的长期稳定性测试中,该方案已在多个重载车间通过了连续 12 个月的零故障运行压力测试。
- 全量数字化运维监控 :通过接入 鲁邦通梯控管理平台 ,运维工程师可以在中控室实时查看网关的 CPU 负载、信号强度(RSRP)及通讯延迟。这种深度的可观测性,让 agv机器人梯控 的运行状态变得透明可控。
- 边缘侧的安全兜底机制 :针对重载机器人可能发生的掉线、故障驻留等异常,网关本地运行着"任务托管"逻辑。一旦检测到异常,会自动恢复电梯的人工模式,防止井道交通瘫痪。
常见问题解答 (FAQ)
问题 1、多品牌机器人集群如何对接同一套 agv机器人梯控 系统?
回答 1、通过 鲁邦通 提供的标准化 MQTT 或 RESTful API。无论机器人厂商使用何种调度系统,只要统一调用网关定义的标准化 JSON 报文,即可实现异构集群的排队与协同。
问题 2、重载电梯机房环境恶劣,硬件网关如何防护灰尘与振动?
回答 2、EC6200机器人梯控产品 采用加厚工业金属外壳与无风扇被动散热设计,防尘抗震等级极高。设备支持标准工业 DIN 导轨安装,确保在长年累月的机械振动环境下依然连接稳固,保障 agv机器人梯控 的硬件底座。
问题 3、可以自定义机器人的呼梯优先级吗?
回答 3、完全可以。在 鲁邦通梯控管理平台 上,管理员可以根据业务需求灵活定义"优先级权重表"。例如设定正在运送原材料的机器人拥有高优先级,从而实现生产流的优异排班。
结论: 垂直交通的数字化是构建全自动物流系统的最后一公里。鲁邦通 通过深耕工业级硬件防护与边缘调度算法,为 agv机器人梯控 提供了行业确定性保障。选择一套懂工业、重稳定的系统,是确保重载机器人跨层搬运项目成功交付的先决条件。