单源最短路问题
单源最短路问题是指固定一个起点,求它到其他任意一点的最短路问题。
Dijkstra算法(迪克斯拉特算法)
首先要注意的是,这个算法仅仅用于图中没有负边的情况。
原理
Dijkstra本质逻辑其实是动态规划 ,我们要求任意点i到起点(假设为1)的距离,我们不妨用一个数组dist记录这一距离,即disti为1->i的最短路距离,所以现在我们需要考虑的问题就是如何更新并求得dist,这一部分就是算法的重点。
我们将图的点分为两个集合,集合A为最短路径已经确定的点,集合B为最短路径尚未确定的点。
每一次我们从B中选取dist最小的点(设为x),将他转移到A中,同时我们利用x的dist来更新x的邻居(设为p)的dist,即
distp=min(distp,distx+e(x,p))//e(x,p)为边xp的权值
通过反复进行B->A操作,最终得到全部的dist,没看懂没关系,我们用图来演示一遍。
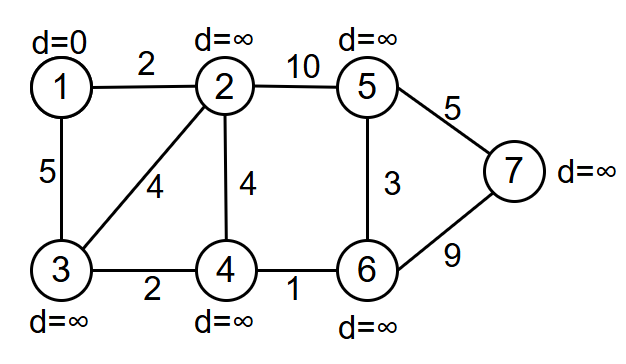
这是图的初始状态,dist简写为d,根据定义我们可得起点的d=0,而其他的dist我们全部设为一个极大的数,方便后续更新,此时我们选取1并入A,同时更新邻居的d值
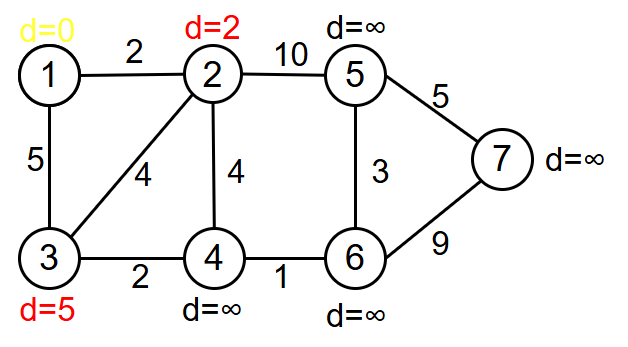
红色 为这一次发生了更新的d,黄色为已经固定的d,也就是集合A中的元素。接下来我们在B中选择min进行更新,显然这次我们应该选择2,我们会进行如下更新
d3:5->5(d2+4>5)
d4:∞->d2+4=6
d5:∞->d2+10=12
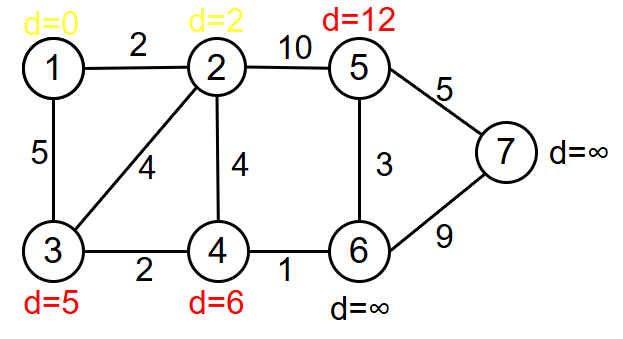
选择最小的d3
d4:6->6(d3+2>6)

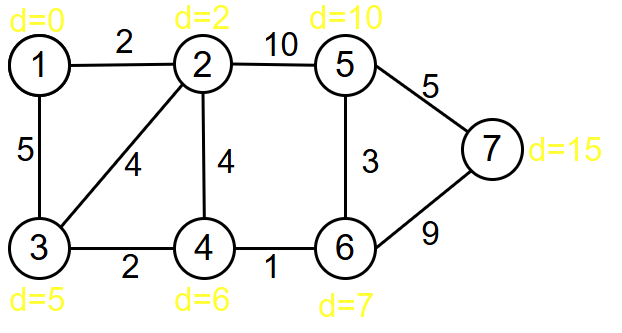
不断重复这一操作,最终使得全部d变成黄色,即全部并入集合A
朴素实现
cpp
const int INF=0x3f3f3f3f;
const int N=1e3+7;//上限
struct edge{
int to,w;
edge(int x,int y){to=x;w=y;}
};
vector<vector<edge>> g(N,vector<edge>());
//邻接表存储图,to为边的终点端,w为权值
bool vis[N];
int dist[N];
void dijkstra(int n,vector<vector<edge>>& g){
//n为图的点数,N>n
for(int i=1;i<=n;i++){
dist[i]=INF;
vis[i]=false;
}
dist[1]=0;
//初始化
while(true){
int v=-1;
for(int i=1;i<=n;i++){
if(vis[i]) continue;
if(v==-1||dist[i]<dist[v]) v=i;
}
if(v==-1) break;
//如果为-1代表全部都被标记,即B集合为空
vis[v]=true;
for(auto p:g[v])//更新操作
dist[p.to]=min(dist[p.to],dist[v]+p.w);
}
}注意此处起点设为1,实际操作时我们可以按照要求修改起点。
最终实现复杂度为O(V²)
堆优化
可以发现,复杂度来源主要是最小dist的选取 以及邻居的更新,邻居更新我们无法继续优化,但是最小dist的选取我们可以用最小堆进行优化。
最小堆我们选用STL中优先队列。
cpp
typedef pair<int,int> P;
const int INF=0x3f3f3f3f;
const int N=1e3+7;//上限
struct edge{
int to,w;
edge(int x,int y){to=x;w=y;}
};
vector<vector<edge>> g(N,vector<edge>());
//邻接表存储图,to为边的终点端,w为权值
bool vis[N];
int dist[N];
void dijkstra(int n,vector<vector<edge>>& g){
//n为图的点数,N>n
priority_queue< P,vector<P>,greater<P> > q;
//first是最短距离,sceond是点的编号
for(int i=1;i<=n;i++)
dist[i]=INF;
dist[1]=0;
q.push(P(0,1));
//初始化
while(!q.empty()){
P x=q.top();q.pop();
int v=x.second;
if(dist[v]<x.first) continue;
//如果x的距离大于dist[v]那就不能用它更新邻居
for(auto p:g[v]){
if(dist[p.to]>dist[v]+p.w){
dist[p.to]=dist[v]+p.w;
q.push(P(dist[p.to],p.to));
}
}
}
}其实可以发现,我们在这里删除了vis数组,实际上,入队操作实现了这一作用,在更新过程中我们将发生更新的元素入队,也就是上文图中红色元素,而已经固定的黄色元素不会发生更新则被剔除,借此实现了vis数组的功能。
最终实现O(ElogV)。
Bellman-Ford算法(贝尔曼福特算法)
相比于迪克斯拉特算法,这一算法可以处理负边的情况**。**
原理
基本原理
这个原理特别简单,我们维护一个数组d,di代表了从起点s到点i的最短路径,那么我们得到
di=min{dj+e(j,i)}//e(j,i)为j到i的权值
如果是**DAG(有向无环图)**我们就可以按照拓扑序遍历。但如果有环,如果不是负环,这也并不影响算法运作,如果有负环这就是我们需要着重考虑的部分了。
负环:环上所有的边权和为负数。
如果有负环,我们将一条最短路径简化成三个点
起点------>负环------>终点
由于负环的权值为负,所以起点到终点的距离可以无限小,因为每走一次负环距离都会缩短(有点神奇不是吗),实现起来就是
起点------>负环环环环环环........------>终点
负环处理原理
所以我们需要检测是否存在负环,有负环就无解(最短路可以无穷小)。
对于任意有V个顶点的图,起点到终点的最短路最多经过(v-1)条边,因为最短路不会同时经过同一顶点两次,除了一种情况,就是负环。因为对于负环来说,经过同一顶点的代价是负的。我们就可以借助这一特性来检测负环。
实现
cpp
struct edge{
int from,to,w;
};
vector<edge> g;//我们选择记录边
int V,E,s;//顶点数,边数,起点数
int d[MAXV];
bool check(){
for(int i=1;i<=V;i++) d[i]=0;//初始化为0,为了应对负边
for(int i=1;i<=V;i++){
for(int j=1;j<=E;j++){
edge e=g[j];
if(d[e.to]>d[e.from]+e.w){
d[e.to]=d[e.from]+e.w;
if(i==V) return false;
//如果第V次都更新了,就代表有负环,因为正常图最多更新V-1次
}
}
}
return true;
}
void Bellman(){
for(int i=1;i<=V;i++) d[i]=INF;
d[s]=0;
while(true){
bool update=false;
for(int i=1;i<=E;i++){
edge e=g[i];
if(d[e.from]!=INF&&d[e.to]>d[e.from]+e.w){
d[e.to]=d[e.from]+e.w;
update=true;
}
}
if(!update) break;
}
}由于while最多循环(V-1)次所以实现为O(V²)
任意两点最短路问题
Floyd-Warshall算法(弗洛伊德-沃舍尔)
对于任意两点的问题,我们用Floyd算法来解决,本质是动态规划。
原理
我们定义状态 fkij ,表示为在只使用编号1-k的顶点当作中间节点的情况下,i到j的最短路。
而f0ij则代表e(i,j),没有就设为无穷大。
所以我们就可以把只用1-k顶点的问题约束到只用1-k-1顶点的问题中
对于顶点k,我们有两种情况,经过k,不经过k,于是我们就可以得到状态转移方程
fkij = min( fk-1ij , fk-1ik + fk-1kj )
实际操作中,由于第一维不会影响算法进行,我们可以去掉第一位减小空间开销。
而Floyd对于负环处理比较简单,只需要检测e(i,j)是否小于0即可,这里不再展示。
实现
cpp
struct edge{
int from,to,w;
};
int n,E;//点数,边数
int f[N][N];
void init(){
for(int i=1;i<=n;i++){
for(int j=1;j<=n;j++){
f[N][N]=INF;
}
}
for(int i=1;i<=E;i++){
int u,v;cin>>u>>v;
cin>>f[u][v];
}
}
void Floyd(){
for(int k=1;k<=n;k++){
for(int i=1;i<=n;i++){
for(int j=1;j<=n;j++){
f[i][j]=min(f[i][j],f[i][k]+f[k][j]);
}
}
}
}最终实现O(n³)