研究课题:
基于模拟退火算法的机器人最短路径规划问题
关键词:
模拟退火算法; 栅格地图; 最短路径规划; Matlab
改进方向:
无
课题说明:
移动机器人路径规划时机器人学的一个重要研究领域,它要求机器人依据某个或某个优化原则(如最小能量消耗、最短路径规划、最短行走时间等等),在其工作空间中寻找一条从起始状态到目标位置的能避开所有障碍物的最优路径。机器人路径问题可以建模为一个有约束的优化问题,都要完成路径规划、起始位置和终止位置定位以及障碍物避障的问题。
局部路径规划:基于部分区域信息理解的路径规划------局部路径规划是在机器人执行任务过程中根据自身携带传感器采集到的局部环境信息进行的实时动态路径规划,具有较高的灵活性和实时性。但由于依靠的是局部环境特征,其获得的路径可能只是局部最优而非全局最优,甚至是目标不可达路径。
全局路径规划:基于完整区域信息理解的路径规划------首先需要 根据已知的全局环境信息,建立抽象的全区域环境地图模型,然后在全区域地图模型上使用寻优搜索算 法获取全局最优或较优路径,最终引导移动机器人在真实情况下向目标点安全的移动。其主要涉及两部分内容: 一是环境信息理解及地图模型构建,二是全局路径搜索及机器人引导。
移动机器人路径规划中,需要融合兼用全局和局部路径规划,前者旨在寻找全局优化路径,后者旨在实时避障。 移动机器人的路径规划中最关键部分就是选取算法, 一个优秀的算法对路径规划起到至关重要的作用。
算法流程:
使用模拟退火算法求解机器人最短路径问题时,要求机器人从设定的初始位置出发,在行进过程中同样要实现机器人避开地图中所有的障碍物,最终达到设定的终点位置。模拟退火算法求解机器人在带障碍物的栅格地图下的最短路径问题的基本步骤如下:
步骤1: 建立带有障碍物的栅格地图,设定好机器人的起始位置和结束位置;
步骤2: 设定算法中的参数,包括初始温度1000,终止温度1,降温速率0.98和链长500;
步骤3: 随机生成一条可行的初始路径,记作Old_path,即当前的路径
步骤4: 基于当前路径Old_path来计算其适应度值,即路径从起点到终点的长度;
步骤5: 由Old_path路径生成一条新的路径,记作New_path,并计算其适应度值(路路径长度;
步骤6: 判断两个路径的适应度值:
(a).如果New_path的适应度值小于Old_path的适应度值,则用New_path的路径信息更新Old_path的信息,并将其更新到全局最佳路径,其适应度值(路径长度)同样更新到全局最短路径长度值中;
(b).若New_path的适应度值大于Old_path的适应度值,则计算接受此条新路径的概率,称为接受概率。再随机产生一个0-1的随机数,若接受概率大于随机数,就仍然用New_path的路径信息更新Old_path的信息; 否则放弃New_path这条路径,还用Old_path路径进行搜索
步骤7:不停地进行降温操作,判断当前温度是否低于终止温度。若未达到,则循环3-6步骤,若达到,则停止程序。输出全局最佳路径Best_path的路径信息,并在地图上画出路径
待改进方向:
1)跳跃式降温方法
2)混合模拟退火算法
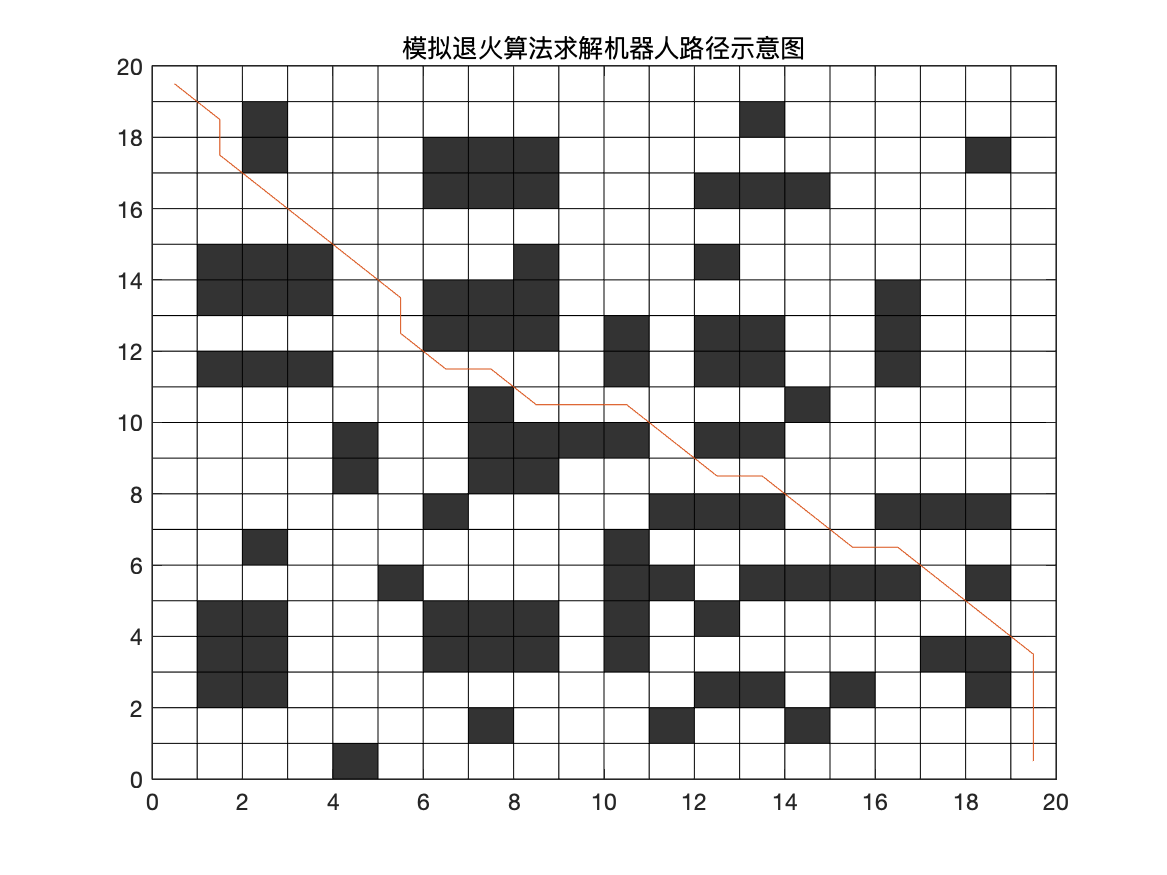
Matlab仿真结果: