前言
前文简要梳理了通电检测的核心需求、行业痛点及解决思路。接下来,本文将详细介绍如何基于达宽平台级力控大脑ForceMaster,实现带电产品的柔性化通电测试。

双网线柔性装配
线束通电检测具体怎么做
柔性通电测试的过程通常可分为几步:物料抓取 ,柔顺插接,到位判断,通电检测和数据记录。
首先通过机械定位(如定位销、专用定位机构)或视觉定位等方法对来料进行精准定位。定位完成后,系统输出定位确认信号------该信号既可配置传输至机器人I/O接口,也可通过ForceMaster的I/O端口或其API接口调用实现交互。若采用视觉定位方案,可利用ForceMaster内置的快捷视觉偏移节点,进一步简化机器人偏移补偿与定位校准的操作流程。完成定位后,机器人将对物料执行抓取动作。
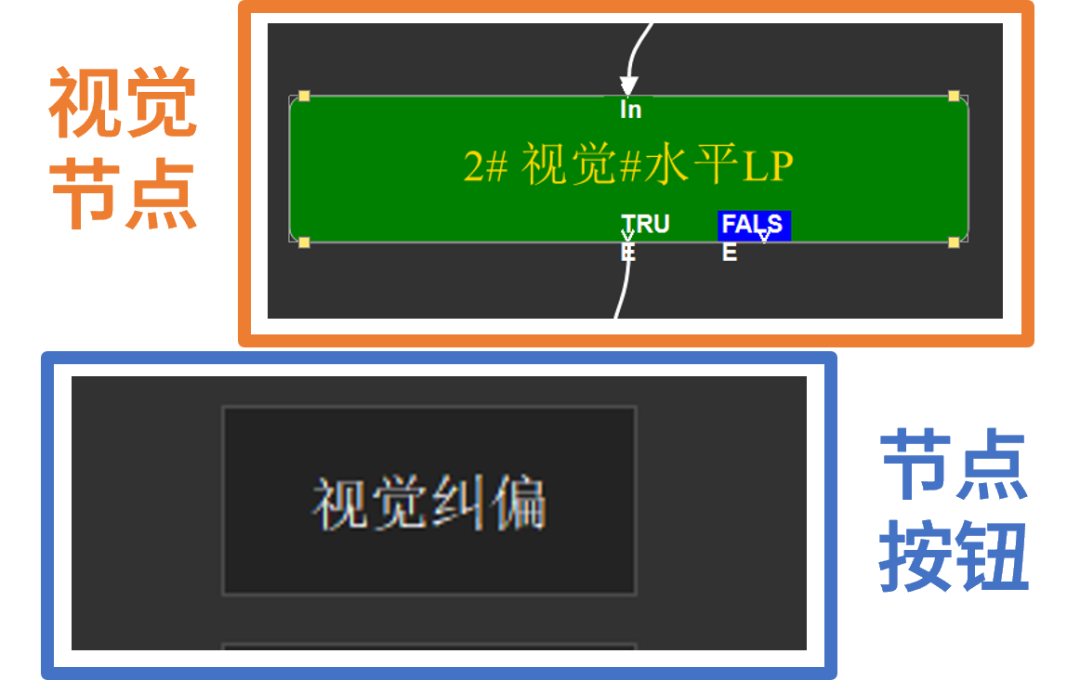
ForceMaster的视觉偏移节点
在抓取物料后,机器人需执行柔顺插接和插接到位判断两个紧密耦合、相辅相成的关键步骤。柔顺插接负责安全、平稳地将线束接口插入接头,而力位混合判断则实时确认插接是否真正完成,避免假到位或过插,防止对通电检测造成影响。两步骤通常在力控系统ForceMaster力控节点的同一段运动路径连续执行,无缝衔接。
USB插接测试
力控节点核心功能解析:
力控节点是ForceMaster软件的核心功能模块之一,支持工程师通过参数化配置实现对机器人插接过程中力反馈响应的精准调控。每个力控节点可独立定义关键参数(包括目标力值、灵敏度、受力方向等)、调节运行速度,并设置终止条件(涵盖力阈值、位置阈值、时间限制及混合判断模式)。
其核心能力体现在:实时监测接触力并动态调整机器人位姿;支持多节点串联构建分段力控策略;集成安全保护机制(如力超限报警);基于预设规则判定动作终止时机。这种模块化设计显著提升了插接过程的可控性与适配范围,尤其在变力场景下能高效实现柔顺插接与到位判定。
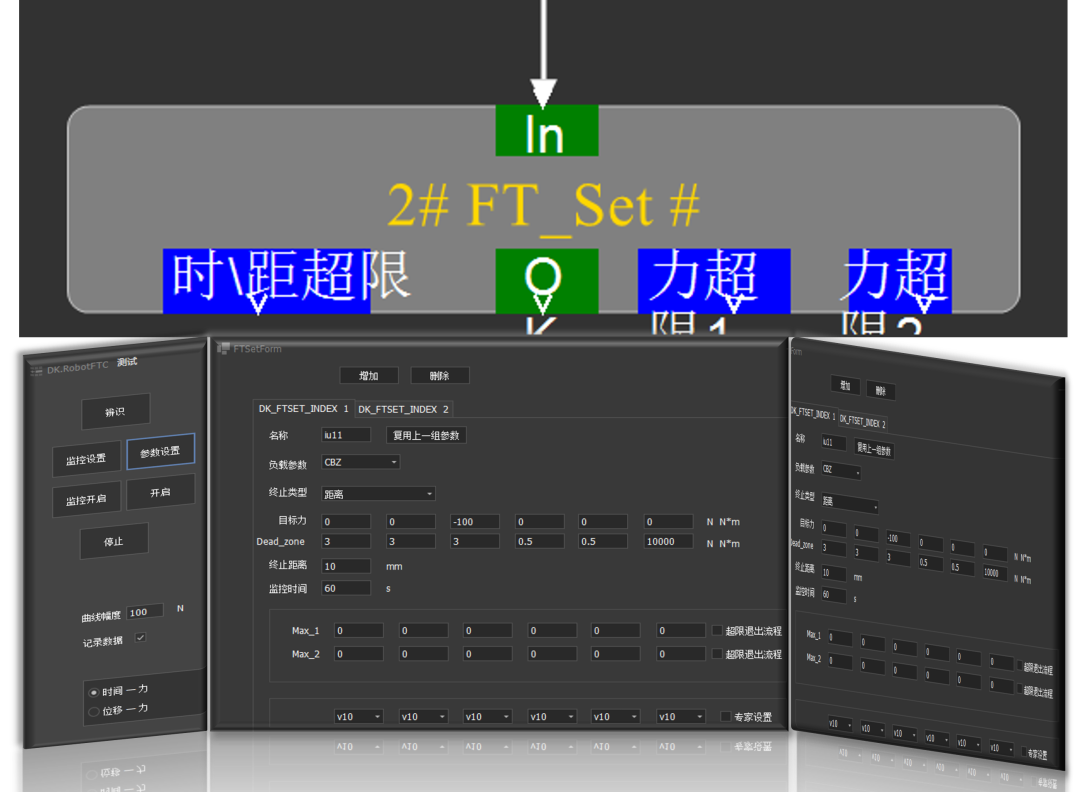
力控节点及参数设置界面
鉴于不同线束与接头的配合特性差异显著,下文将结合工程实践中常见的典型线束类型,讲解其设置方法。
PCB板插装通电测试
1,单力控节点方案
单力控节点可同步完成柔顺插接与到位判定,兼具操作简洁性与高效性,同时能为装配过程提供保护与实时监测。在达宽ForceMaster系统中,需在力控节点内配置对应参数及终止条件------此处终止条件即作为到位判定依据,采用力-位混合判断逻辑:仅当实际插接过程中的作用力与插入深度均满足设定值时,方判定为"装配到位";任一条件未达标则持续插接或触发报警。
2,多力控节点分段方案
该方案专为插接力随插入距离动态变化或存在多段力峰值的装配场景设计(如部分汽车线束、主板线束的插入过程,常出现初始轻插接力、中段稳定插接力、末段卡紧力等多段力学特征)。
**其实现方式为:**将多个力控节点串联,按不同插入力对应的距离区间分段配置参数。各节点可独立设置力控参数与终止条件,机器人按序执行------当前节点满足终止条件后自动切换至下一节点,直至末端节点达成到位判定条件后退出。此方案通过分段匹配最佳力控参数,并以末端节点专司精确到位判定,有效避免前段力峰值误判为"已到位"。
需注意,所有力控节点需开启"力超限保护",防止异常卡阻损坏线束或设备。在实际项目中,建议先根据具体线束样品做力曲线采集实验,基于数据特征决策采用单节点还是多节点方案。
当插接到位到位确认后,ForceMaster系统会立即自动触发下游检测环节。通常采用两种信号输出方式:通过I/O接口输出或通过ForceMaster API接口调用,可根据产线控制架构灵活选型。
检测设备接收到信号后,即刻启动通电测试程序,对线束施加规定电压/电流,进行电气性能检测,并自动记录全套测试数据(包括测试结果、合格/不合格判定等)。至此,柔性通电测试全流程完成。
总结
总结一下,从物料抓取 → 柔顺插接与到位判断 → 通电检测与数据记录,整个线束通电检测流程形成了一个无缝衔接的完整自动化闭环。该方案为汽车、3C电子、航空航天、仪器仪表等领域的产品质检提供了成熟、可复制的技术路径。