摘要
机械手技术是机电一体化产品,吸盘抓设得机械手成为一个领先的研究课题,目前应用在不同领域,如机械,电子,信息理论,人工智能,生物学和计算机,知识等诸多领域的发展机械接头端的设计,机械手也导致了这些学科的发展。关节型机械手是一种典型的机电一体化产品,工艺多关节运动的一个热点手臂运动更多的领域进行合作研究。机械,电子,信息理论,人工智能,知识和生物和计算机许多学科,但其发展的多机构衔接所需组合治疗也促成了这些学科的发展。
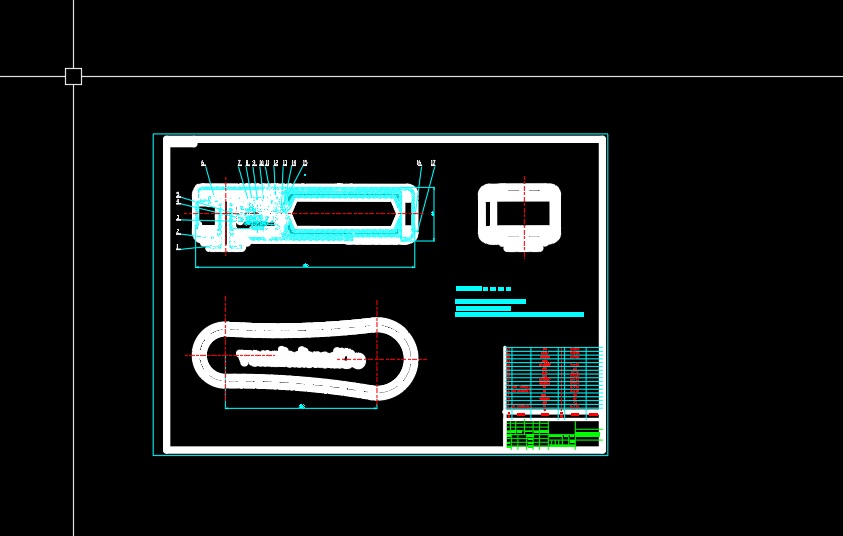
本文采用在结构设计上的关节型机械手,并完成图纸和零件图总装配图。为机械手模型的要求被分析以估计的每个关节,充分的选择电机所需要的转矩和功率。完成关节型机械手的程序设计,总体设计,结构设计,运动学模型操盘分析,检查,分析机械手模型,设计和生产机械手模型做的过程中强度的关键部件,绘制2D图,3D图,完整的运动仿真。
关键词:机械臂,结构设计,吸盘关节机械手,电机分节符(下一页)
目 录
1 绪论 1
1.1引言 1
1.2 吸盘关节机械手研究概况 2
1.2.1 国外研究现状 2
1.2.2 国内研究现状 2
1.3 吸盘关节机械手的总体结构 3
2 总体方案设计 5
2.1 吸盘关节机械手工程概述 5
2.2 工业吸盘关节机械手总体设计方案论述 5
2.3 吸盘关节机械手机械传动原理 6
2.4 吸盘关节机械手总体方案设计 7
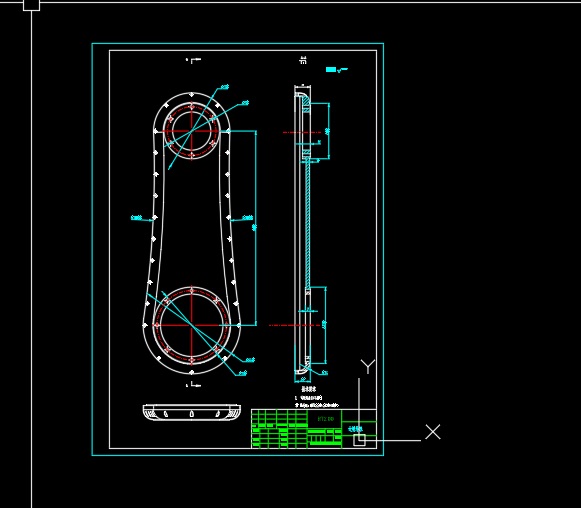
3 机械手大臂部结构 10
3.1 大臂部结构设计的基本要求 10
3.2 大臂部结构设计 11
3.3 大臂电机及传动齿轮选型 11
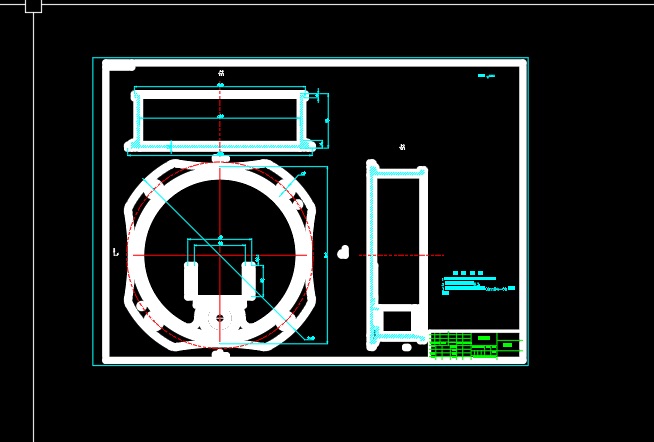
4 小臂结构设计 15
4.1 腕部设计 15
4.1.1 手腕偏转驱动计算 15
4.1.2 电动机的选择 21
4.2 小臂部结构设计 23
4.3 小臂电机选型 23
4.4 传动选择 23
4.5 轴结构尺寸设计 27
4.6 轴的受力分析及计算 28
4.7 轴承的寿命校核 28
4.9 轴的强度校核 29
4.10 各轴键、键槽的选择及其校核 30
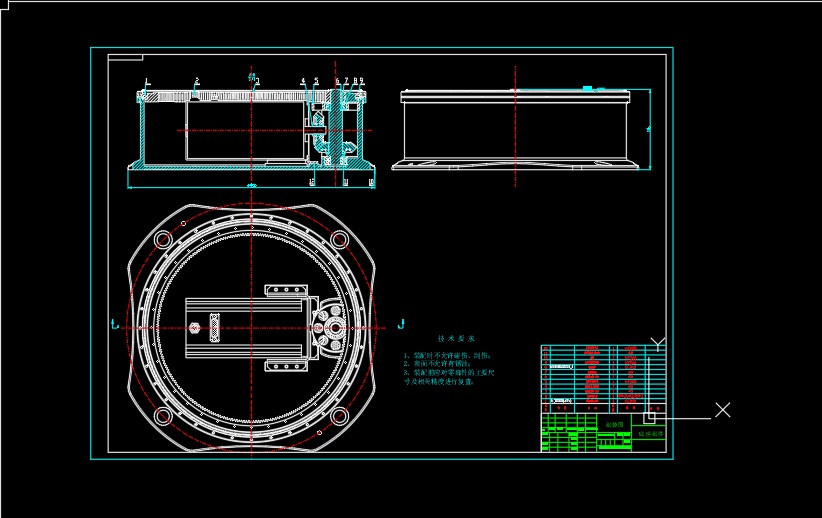
5 机身设计 31
5.1 步进电机选择 31
5.1.1 计算输出轴的转矩 31
5.1.2 确定各轴传动比 33
5.1.3 传动装置的运动和动力参数 33
5.2 齿轮设计与计算 35
5.2.1 高速级齿轮设计与计算 35
5.2.2 低速级齿轮设计与计算 39
5.3 轴的设计与计算 42
5.3.1 输入轴的设计与计算 42
5.3.2 中间轴的设计与计算 44
5.3.3 输出轴的设计与计算 46
5.4 轴承的校核 48
5.4.1 输入轴上轴承寿命计算 48
5.4.2 中间轴上轴承寿命计算 49
5.4.3 输出轴上轴承寿命计算 50
5.5 键的选择和校核 51
5.5.1 键的选择 51
5.5.2 键的校核 51
5.6 机身结构的设计 52
5.6.1 机身箱体材料的选择 52
5.6.2 机身的结构设计及制造工艺 52
总结与展望 53
致 谢 54
参考文献 55
1 绪论
1.1引言
关节型机器人是联合研究的一个典型的机电一体化产品,热工艺衔接手臂运动
更多的领域。许多学科机械,电子,信息理论,人工智能,知识和生物和计算机,
但多机构收敛所需组合疗法的发展也带动了这些学科的发展。多臂多关节手臂运动
的共同领导。
1959年世界上第一个多关节工业多关节手臂运动的诞生,创造发展臂的新时代。
科学技术的发展和多关节的快速发展行动研究部门的应用。加藤一郎,日本早稻田
大学手臂关节和更多的世界知名专家,教授说。顺便说一下,自动化程度高,动力
系统复杂"的一个很大的特点,多关节手臂运动必须有工作。"伟大的发明家爱迪生
曾经说过:"上帝造人的腿是最美丽的杰作。"该系统需要一个丰富的动态环境中是
非常低的,无论在地面和非结构化地形的适应性良好的环境状态。为了扩展功能和
多连杆式机器人的应用程序打开无限的发展前景广阔。
关节型机器人研究的原因和目的,主要表现在以下几个方面:开发组织,让他
们在结构性和非结构性的工作,许多圈子,而不是个人或扩展和人类活动的更新的
领域;希望有更多的人有一个内在的理解和认识,并使用这些功能对个人服务,如假
肢。在这个领域和丰富的研究体系,其研究手臂运动更加危险机的详细动态,多关
节手臂运动可以是一个聪明的举动,如果多关节臂在人工智能领域中发挥重要的作
用。
多关节手臂运动世界上唯一的格式定义是不一样的。联合国训练研究所与更多
的公司最近标准化的手臂运动带来用他的胳膊国际多关节运动的美的定义:操作臂
允许您更改程序中通用的多联合演习可编程操作系统,操作完成各种各样的工作,
特别是对物料输送,传动部件。参照国际定义,并结合定义中国多臂化合物如下:
多关节机器人是一个独立的动作,更自由和灵活性,以改变该程序,它可以被
放置在任何地方,自动化程度高的机器的自动化。汽车油漆或其他涂料行业更关节
关节E'可用。
更硬的臂关节臂高相比与其他可能的应重的东西迅速,准确度是非常高的,可
以基于外部信号,各种自动化系统。
运动处理多关节臂是计算机自动可编程控制装置的控制之下。多关节机械手用
于提高产品的质量和工作的生产率,生产过程的自动化,改善了工作条件和降低了
劳动强度的有效手段。诞生和多关节手臂运动的发展,虽然只有30岁,但已经应用
到国民经济的许多部门,民间的技术,应用,具有广阔的发展前景,显示出强大的
生命力1-2。
1.2 吸盘关节机械手研究概况
1.2.1 国外研究现状
人类和动物的运动原理的第一个系统研究是迈布里奇发明了照相机跟单,即设
定的触发相机的电源,并在1877年他成功地参加了四足和连续运行的许多照片。后
来,这种方法使用的相机是用来研究人体运动Demeny。从1930年到1950年,苏联也
伯恩斯坦从深入人类和动物研究的生物动力机制的角度看,并提出的议案非常形象
化的描述。
真正研究机构运动多关节全面,系统于1960年推出至今,联合多月的手臂比较
完整的理论体系只有形成,并在一些国家,如日本,美国和"苏联已成功开发出可以
是静态或动态的,多臂枢轴原型。在这一节中,我们介绍了1960年至1985年期间,
臂多关节实地达到的运动的最重要的进展的团队。
在20世纪60年代和70年代,武装多关节运动控制理论产生三种类型的控制方法
是非常重要的,这限制了国家控制,控制参考模型和控制算法。这三种控制的方法
对所有类型的吸盘关节机械手都是适用的。国家控制是通过在1961年提出的模
型的参考检查于1975年由美国法恩斯沃思南斯拉夫托莫维奇限制,该算法是由著名
的胳膊南斯拉夫研究所米哈伊尔•罗多关节运动学专家鲍宾控制Vukobratovic博士
1969 - 1972年的教堂中扣除。有这三种类型的控制方法之间的内在关系。有限状态
控制实质上是一个控制参考模型,并且该控制算法是这种情况1的中心。
在搜索步态,苏联Bessonov和Umnov定义"最佳步态",Kugushev和Jaro-
shevskij定义自由的步伐。这两种步态不仅能适应,而且要适应胳膊多条腿多企业的
动向。在这些中,对于自由路径的步骤的条件的规那么。如果地形是非常粗糙的,所
以运动臂多关节,下一步应放在哪里脚不能基于对步骤序列来加以考虑,但应通过
步骤以便攀登者去步骤通过一些优化标准来确定哪个是所谓的自由速度。
稳定性研究手臂动作的多关节,美国Hemami,该提议的稳定性和系统的控制的
简化模型作为振荡器,反转(倒立摆),它可以被解释为在换能器存在的问题的向前
运动。此外,减少了控制的考虑,Hemami,谁也研究手臂运动的多关节"减少型"问
题的复杂性进行了研究。
此前我们指出了系统的Vukobratovic还人形能量分析,但它的力量是有限的关节
和随时间的整个系统的变化,并没有