图像形态学操作和边缘检测是计算机视觉中处理图像纹理、提取轮廓特征的核心技术,广泛应用于文字增强、指纹修复、目标边缘提取等场景。本文将从基础的形态学操作(腐蚀、膨胀、开 / 闭运算)入手,逐步深入到 Sobel、Scharr、Laplacian、Canny 等经典边缘检测算法,结合太阳、文字、指纹、数字图像等实战案例,手把手教你掌握图像增强与边缘提取的完整流程。
一、核心知识点
1.1 形态学操作
基于图像形状的一系列操作,通过结构元素(kernel) 对图像像素进行遍历,改变图像的几何结构:
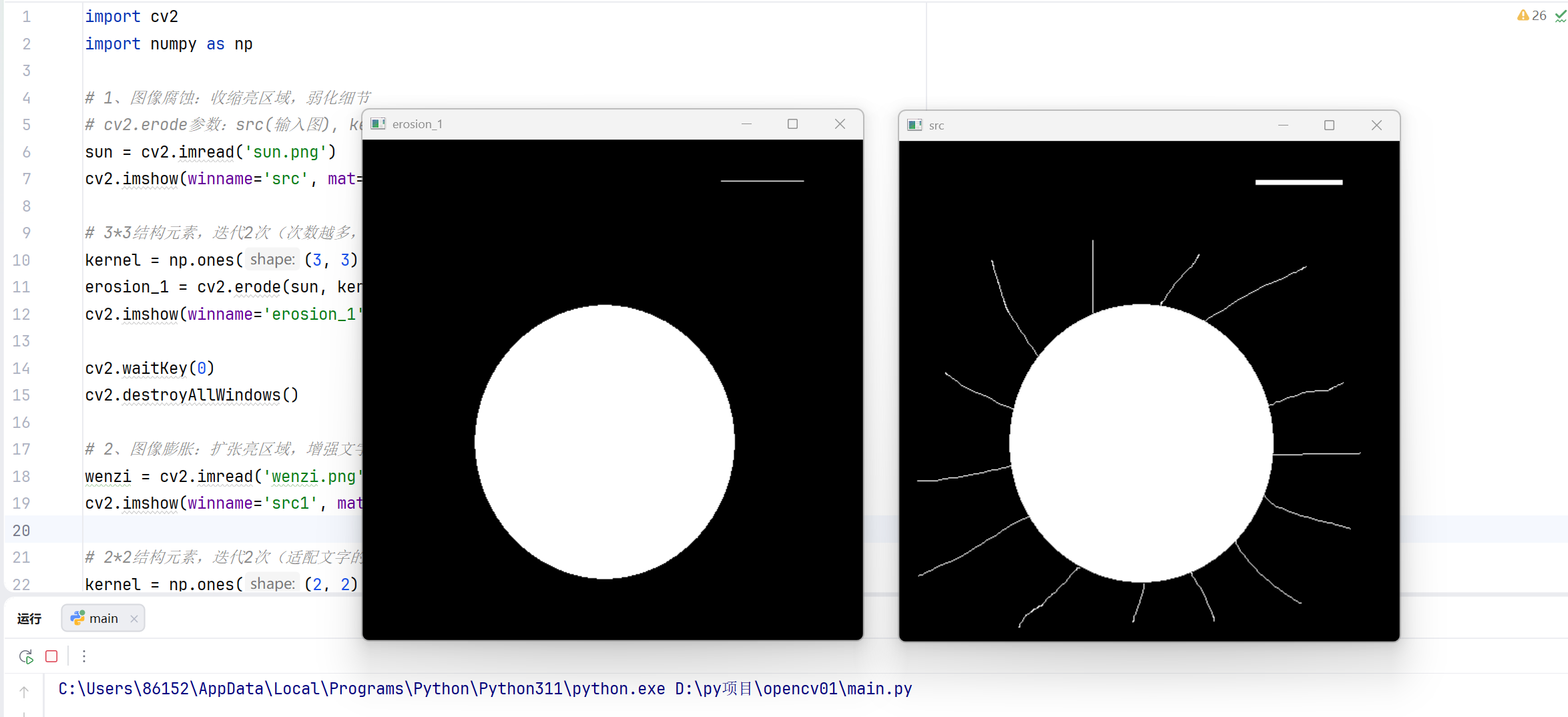
- 腐蚀:收缩图像中的亮区域,弱化细节、消除小的亮噪点;
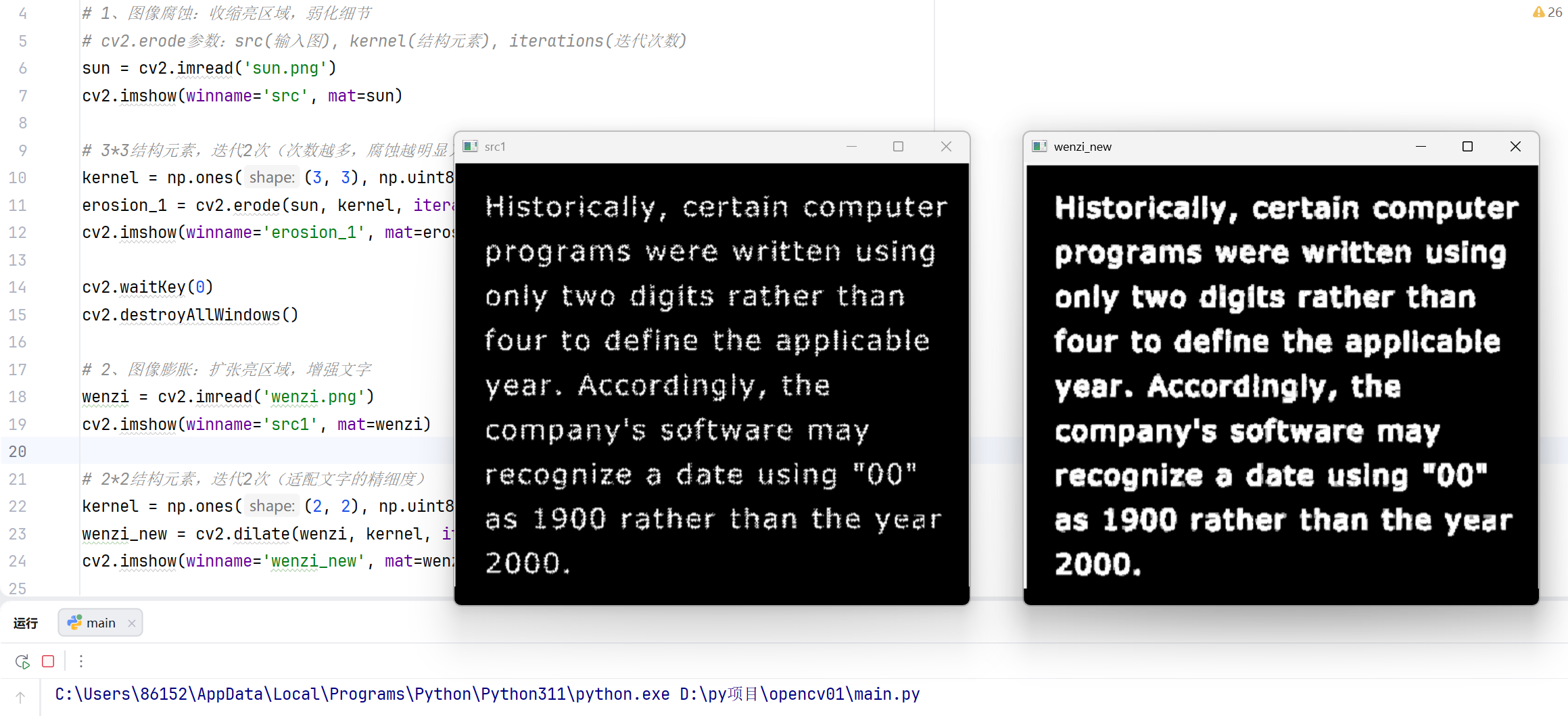
- 膨胀:扩张图像中的亮区域,增强细节、填补小的暗孔洞;
- 开运算:先腐蚀后膨胀,用于平滑轮廓、消除细小白点;
- 闭运算:先膨胀后腐蚀,用于弥合缝隙、填补小黑洞;
- 形态学梯度:膨胀图 - 腐蚀图,突出物体边缘;
- 顶帽 / 黑帽:顶帽 = 原图 - 开运算图(突出亮细节),黑帽 = 闭运算图 - 原图(突出暗细节)。
1.2 边缘检测
检测图像中像素值突变的区域,核心算法:
- Sobel:基于差分计算,分别检测 x/y 方向边缘,计算简单但对弱边缘不敏感;
- Scharr:Sobel 的改进版,增强边缘检测的灵敏度;
- Laplacian:二阶导数检测,对噪声敏感但能检测无方向边缘;
- Canny:多阶段优化(降噪→梯度计算→非极大值抑制→双阈值筛选),边缘检测效果最优。
二、项目实战 1:基础形态学操作(腐蚀、膨胀、开 / 闭运算)
2.1 核心目标
掌握腐蚀、膨胀的基础用法,理解开运算(修复指纹毛刺)、闭运算(填补指纹断裂)的实际应用场景。
2.2 完整代码与解析


python
import cv2
import numpy as np
# 1、图像腐蚀:收缩亮区域,弱化细节
# cv2.erode参数:src(输入图), kernel(结构元素), iterations(迭代次数)
sun = cv2.imread('sun.png')
cv2.imshow(winname='src', mat=sun)
# 3*3结构元素,迭代2次(次数越多,腐蚀越明显)
kernel = np.ones((3, 3), np.uint8)
erosion_1 = cv2.erode(sun, kernel, iterations=2)
cv2.imshow(winname='erosion_1', mat=erosion_1)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 2、图像膨胀:扩张亮区域,增强文字
wenzi = cv2.imread('wenzi.png')
cv2.imshow(winname='src1', mat=wenzi)
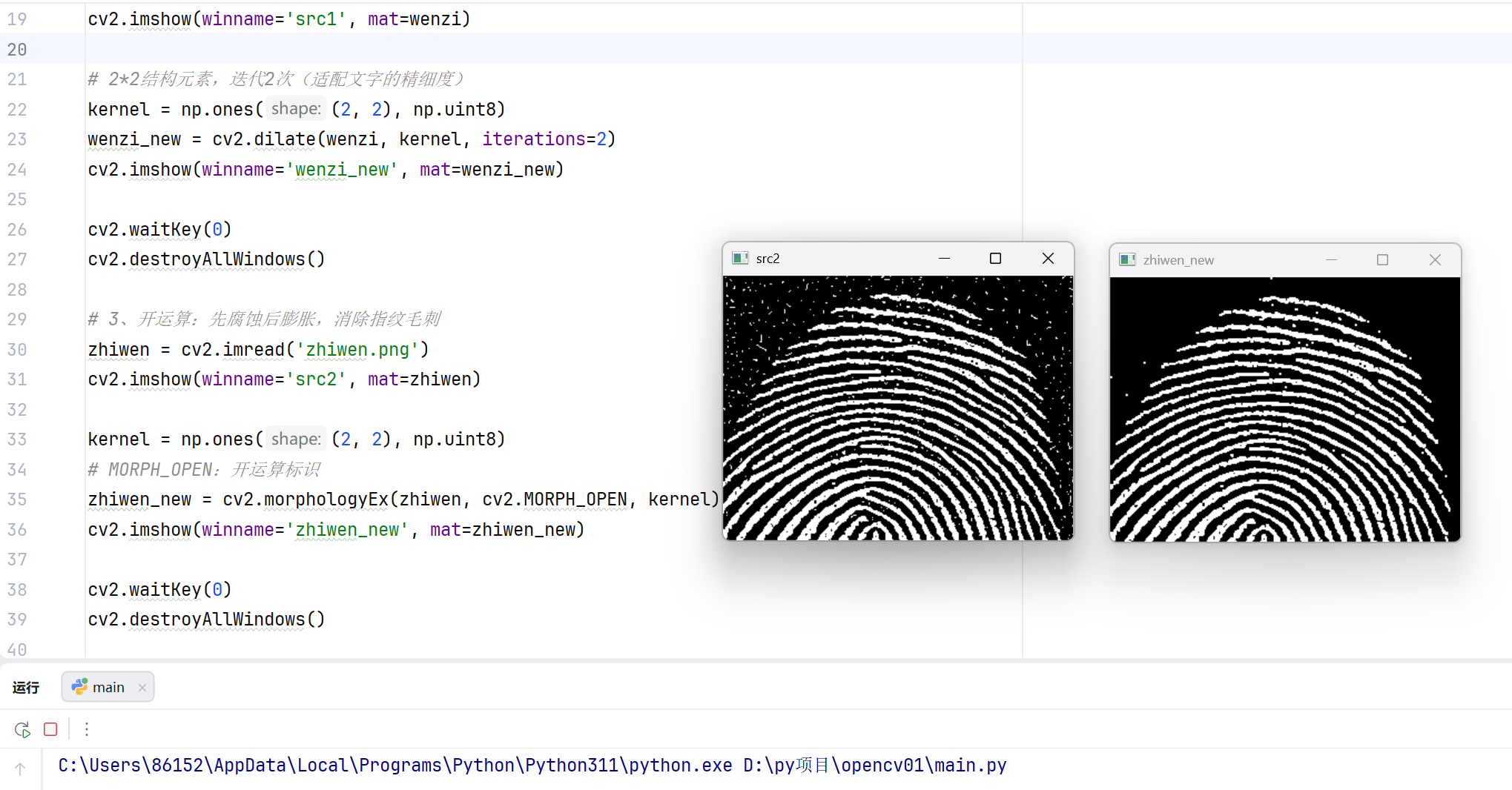
# 2*2结构元素,迭代2次(适配文字的精细度)
kernel = np.ones((2, 2), np.uint8)
wenzi_new = cv2.dilate(wenzi, kernel, iterations=2)
cv2.imshow(winname='wenzi_new', mat=wenzi_new)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 3、开运算:先腐蚀后膨胀,消除指纹毛刺
zhiwen = cv2.imread('zhiwen.png')
cv2.imshow(winname='src2', mat=zhiwen)
kernel = np.ones((2, 2), np.uint8)
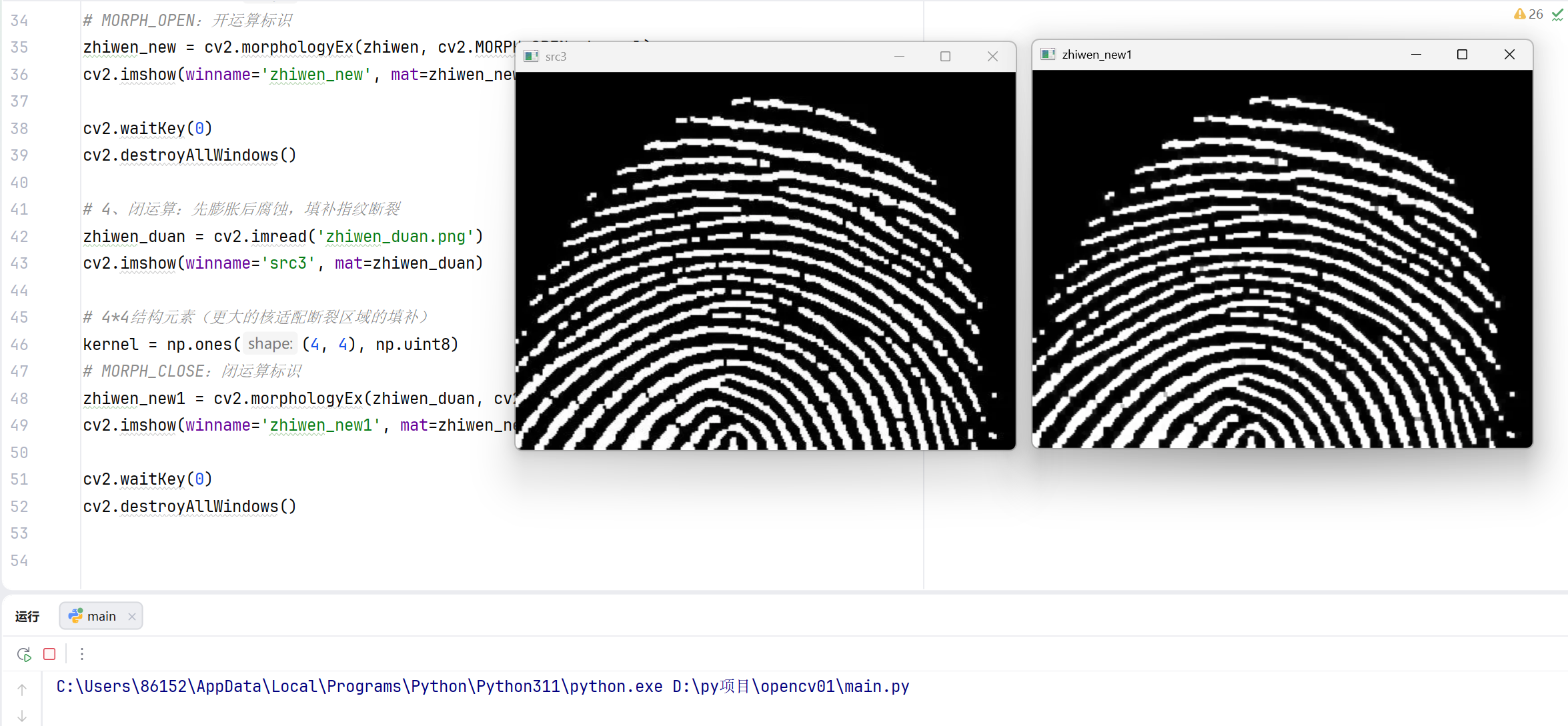
# MORPH_OPEN:开运算标识
zhiwen_new = cv2.morphologyEx(zhiwen, cv2.MORPH_OPEN, kernel)
cv2.imshow(winname='zhiwen_new', mat=zhiwen_new)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 4、闭运算:先膨胀后腐蚀,填补指纹断裂
zhiwen_duan = cv2.imread('zhiwen_duan.png')
cv2.imshow(winname='src3', mat=zhiwen_duan)
# 4*4结构元素(更大的核适配断裂区域的填补)
kernel = np.ones((4, 4), np.uint8)
# MORPH_CLOSE:闭运算标识
zhiwen_new1 = cv2.morphologyEx(zhiwen_duan, cv2.MORPH_CLOSE, kernel)
cv2.imshow(winname='zhiwen_new1', mat=zhiwen_new1)
cv2.waitKey(0)
cv2.destroyAllWindows()- 结构元素 kernel :大小决定操作强度,小核(22)适配精细纹理(文字),大核(44)适配粗纹理(指纹断裂);
- 迭代次数 iterations:次数越多,腐蚀 / 膨胀效果越明显,但过度迭代会导致图像失真;
- 开 / 闭运算的场景:开运算适合处理 "有毛刺的指纹",闭运算适合处理 "有断裂的指纹",是实际项目中纹理修复的常用手段。
三、项目实战 2:进阶形态学操作(梯度、顶帽、黑帽)
3.1 核心目标
掌握形态学梯度(提取边缘)、顶帽 / 黑帽(增强细节)的用法,理解形态学操作的组合应用。
3.2 完整代码与解析
python
import numpy as np
import cv2
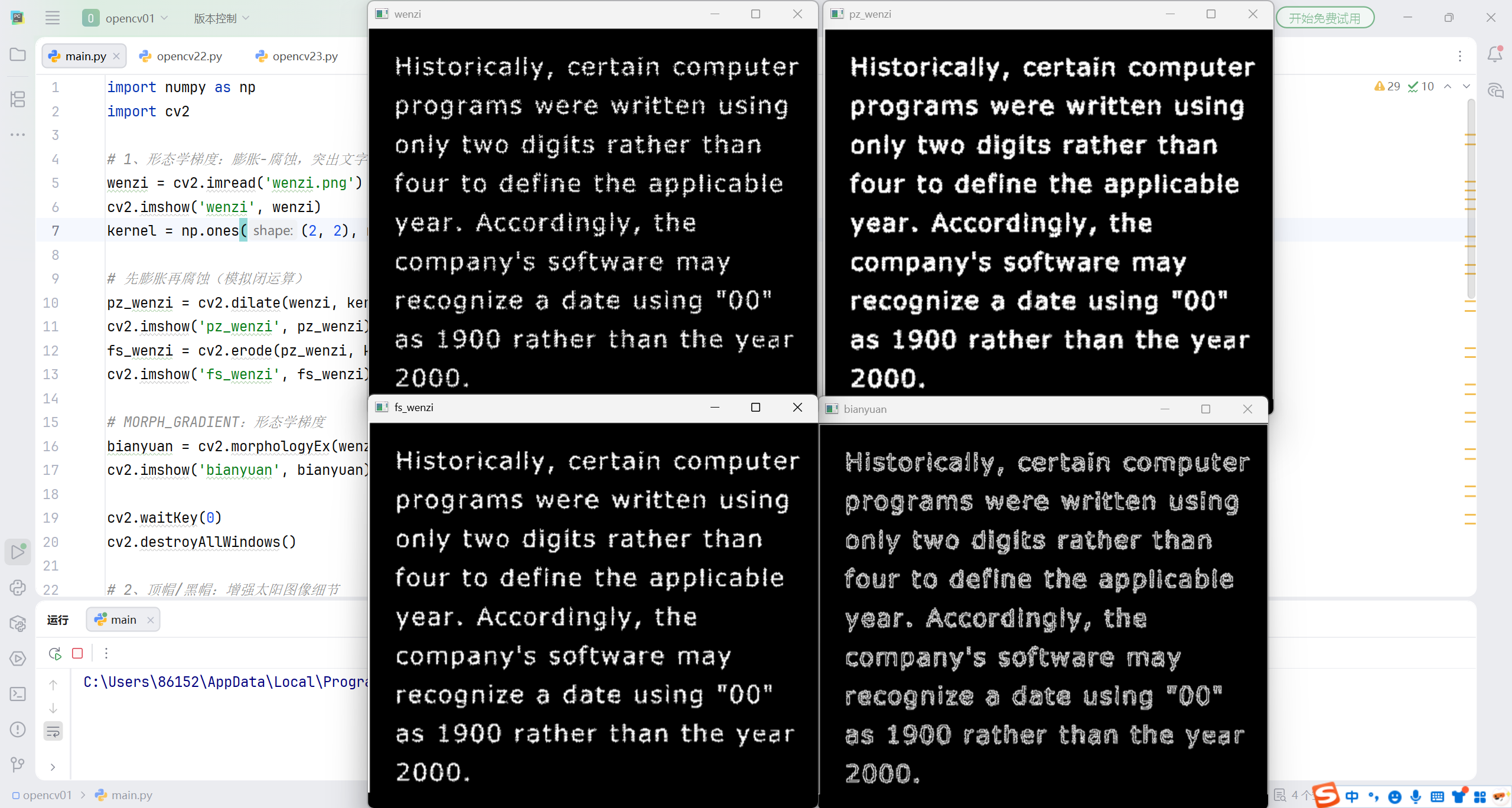
# 1、形态学梯度:膨胀-腐蚀,突出文字边缘
wenzi = cv2.imread('wenzi.png')
cv2.imshow('wenzi', wenzi)
kernel = np.ones((2, 2), np.uint8)
# 先膨胀再腐蚀(模拟闭运算)
pz_wenzi = cv2.dilate(wenzi, kernel, iterations=1)
cv2.imshow('pz_wenzi', pz_wenzi)
fs_wenzi = cv2.erode(pz_wenzi, kernel, iterations=1)
cv2.imshow('fs_wenzi', fs_wenzi)
# MORPH_GRADIENT:形态学梯度
bianyuan = cv2.morphologyEx(wenzi, cv2.MORPH_GRADIENT, kernel)
cv2.imshow('bianyuan', bianyuan)
cv2.waitKey(0)
cv2.destroyAllWindows()
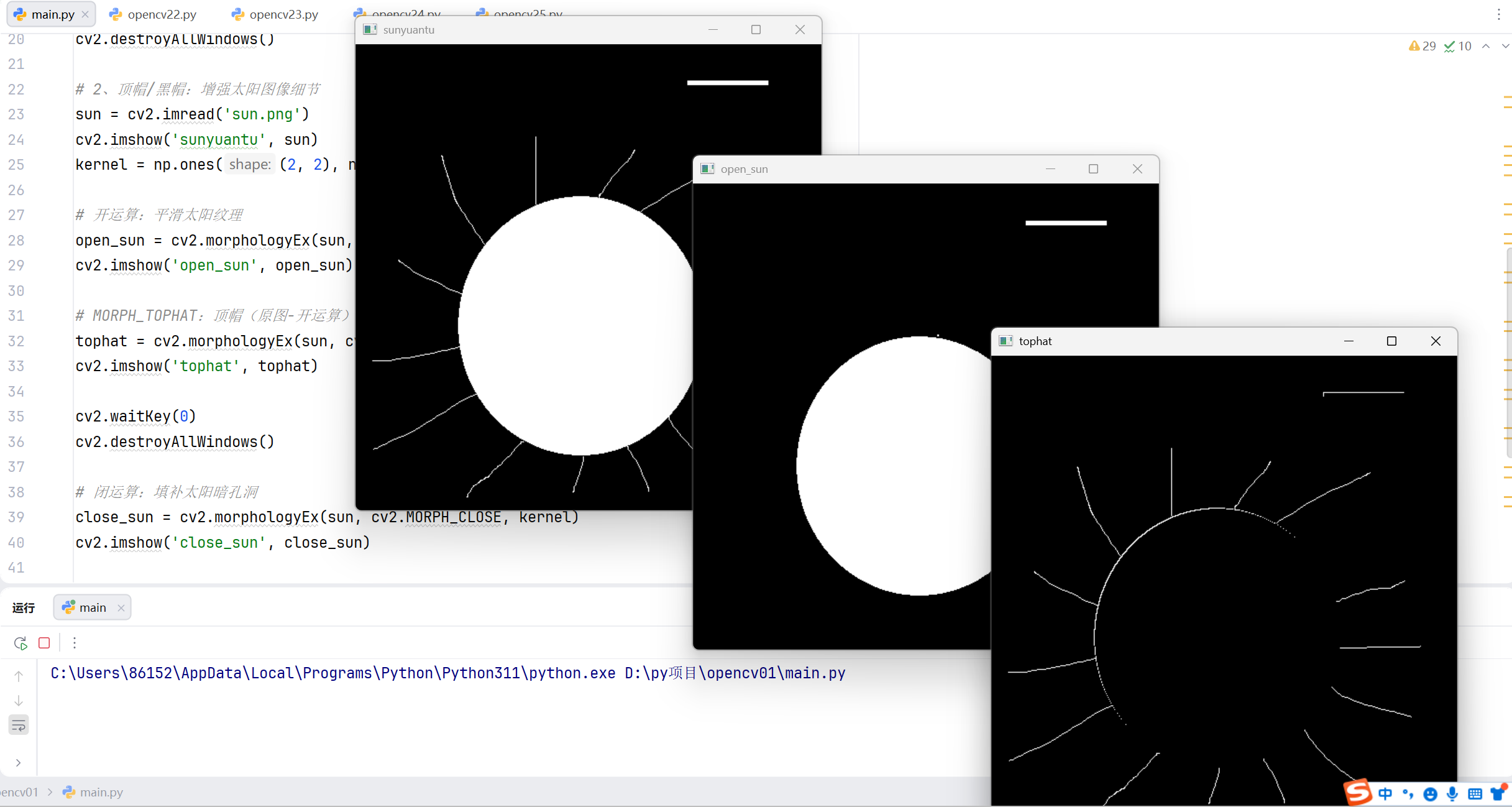
# 2、顶帽/黑帽:增强太阳图像细节
sun = cv2.imread('sun.png')
cv2.imshow('sunyuantu', sun)
kernel = np.ones((2, 2), np.uint8)
# 开运算:平滑太阳纹理
open_sun = cv2.morphologyEx(sun, cv2.MORPH_OPEN, kernel)
cv2.imshow('open_sun', open_sun)
# MORPH_TOPHAT:顶帽(原图-开运算),突出亮细节
tophat = cv2.morphologyEx(sun, cv2.MORPH_TOPHAT, kernel)
cv2.imshow('tophat', tophat)
cv2.waitKey(0)
cv2.destroyAllWindows()
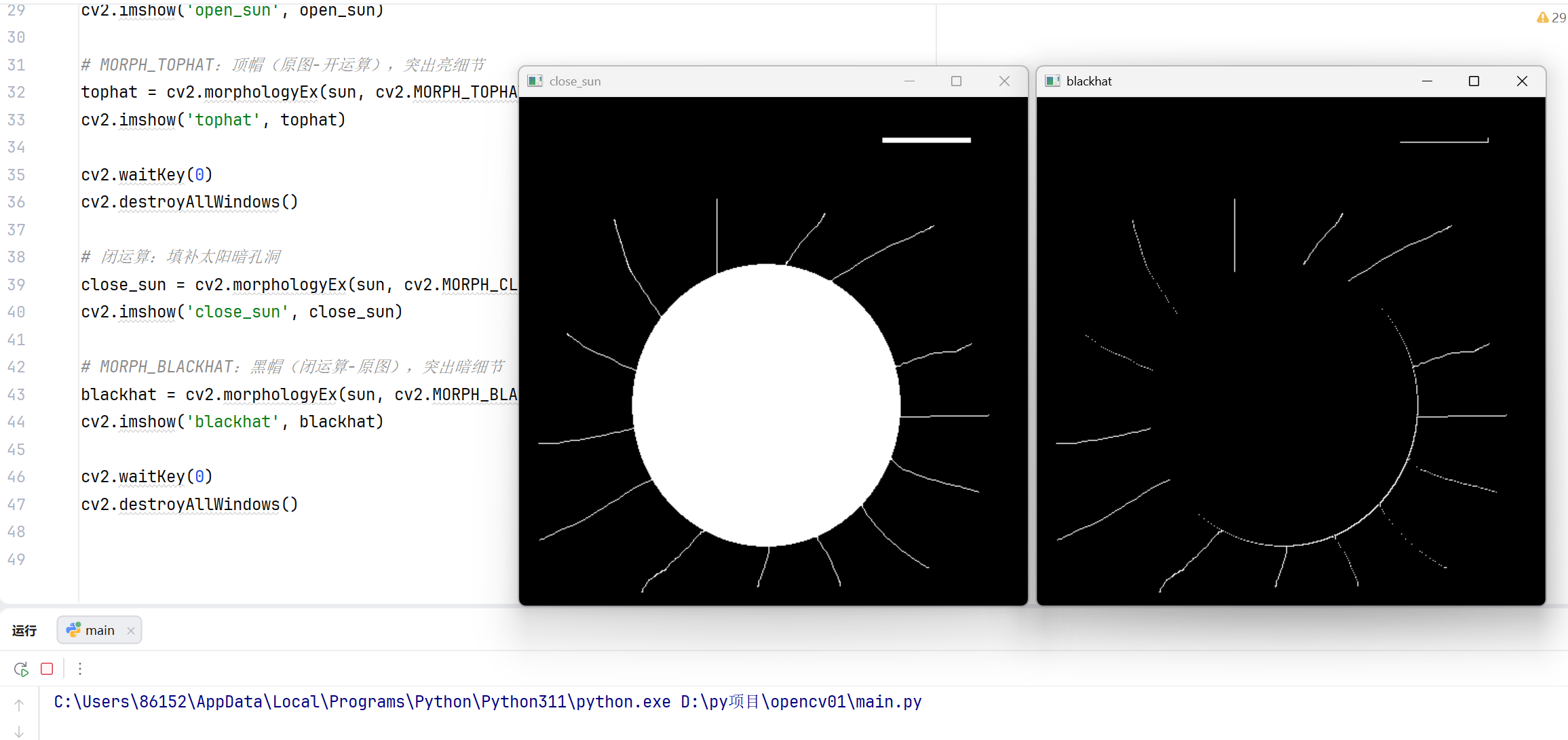
# 闭运算:填补太阳暗孔洞
close_sun = cv2.morphologyEx(sun, cv2.MORPH_CLOSE, kernel)
cv2.imshow('close_sun', close_sun)
# MORPH_BLACKHAT:黑帽(闭运算-原图),突出暗细节
blackhat = cv2.morphologyEx(sun, cv2.MORPH_BLACKHAT, kernel)
cv2.imshow('blackhat', blackhat)
cv2.waitKey(0)
cv2.destroyAllWindows()3.3 关键说明
- 形态学梯度:无需手动计算 "膨胀 - 腐蚀",OpenCV 直接通过MORPH_GRADIENT实现,是提取物体边缘的轻量方法;
- 顶帽操作:适合增强图像中比周围亮的小区域(如太阳表面的亮斑);
- 黑帽操作:适合增强图像中比周围暗的小区域(如太阳表面的暗纹)。
 四、项目实战 3:Sobel 边缘检测(x/y 方向边缘提取)
四、项目实战 3:Sobel 边缘检测(x/y 方向边缘提取)
4.1 核心目标
掌握 Sobel 算子的基础用法,解决 "负数边缘信息丢失" 问题,实现 x/y 方向边缘的融合。
4.2 完整代码与解析
python
import cv2
import numpy as np
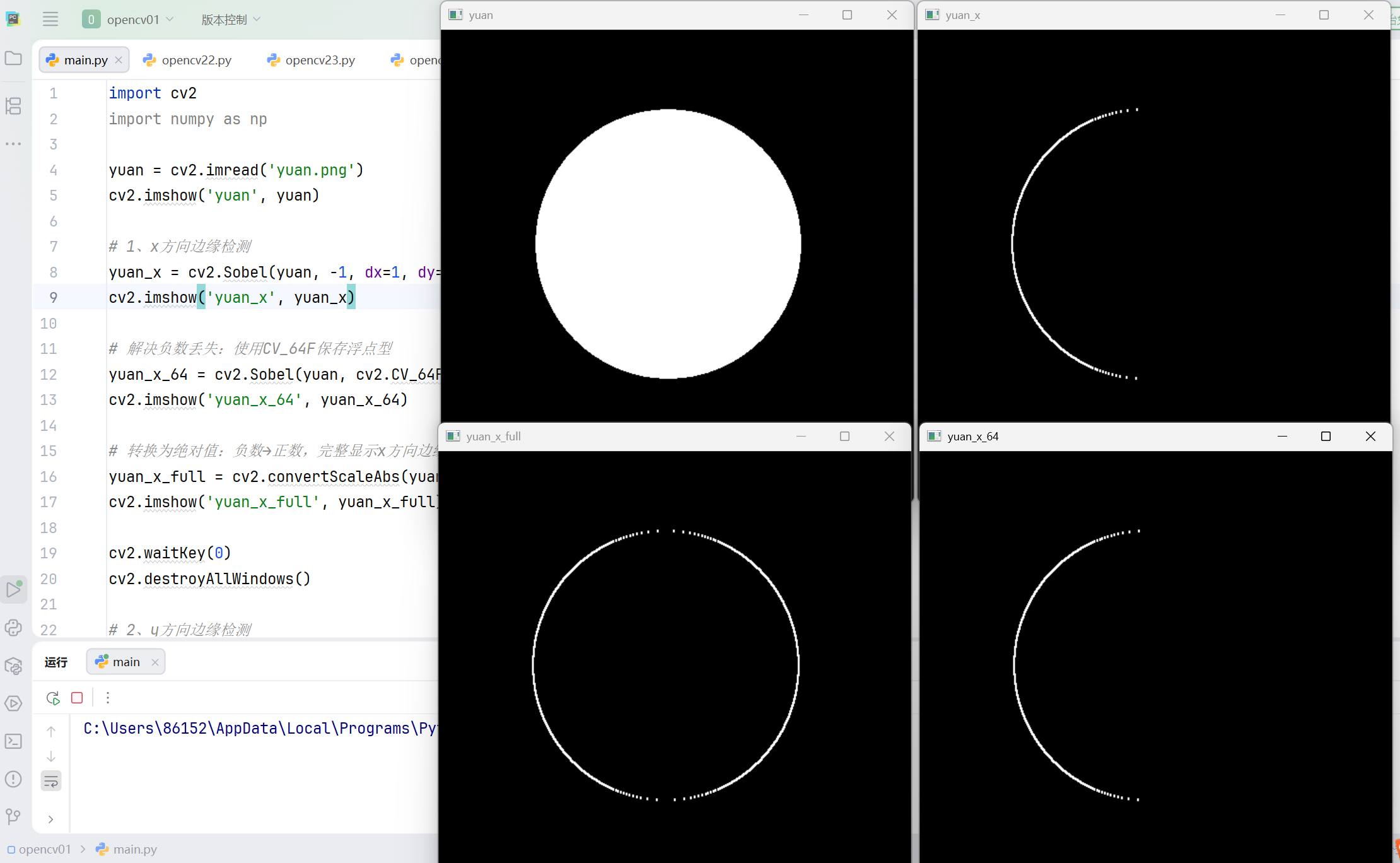
yuan = cv2.imread('yuan.png')
cv2.imshow('yuan', yuan)
# 1、x方向边缘检测
yuan_x = cv2.Sobel(yuan, -1, dx=1, dy=0)
cv2.imshow('yuan_x', yuan_x)
# 解决负数丢失:使用CV_64F保存浮点型
yuan_x_64 = cv2.Sobel(yuan, cv2.CV_64F, dx=1, dy=0)
cv2.imshow('yuan_x_64', yuan_x_64)
# 转换为绝对值:负数→正数,完整显示x方向边缘
yuan_x_full = cv2.convertScaleAbs(yuan_x_64)
cv2.imshow('yuan_x_full', yuan_x_full)
cv2.waitKey(0)
cv2.destroyAllWindows()
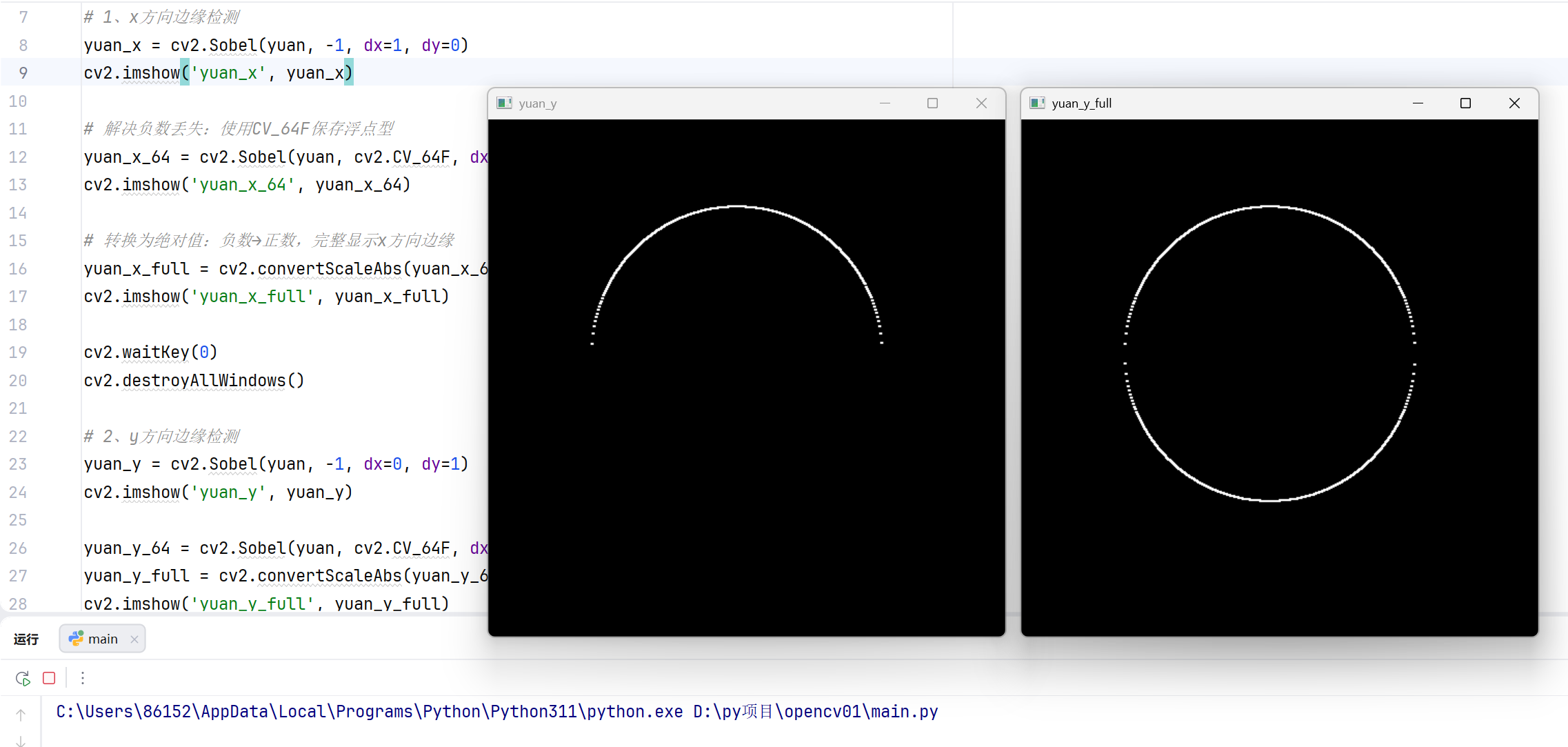
# 2、y方向边缘检测
yuan_y = cv2.Sobel(yuan, -1, dx=0, dy=1)
cv2.imshow('yuan_y', yuan_y)
yuan_y_64 = cv2.Sobel(yuan, cv2.CV_64F, dx=0, dy=1)
yuan_y_full = cv2.convertScaleAbs(yuan_y_64)
cv2.imshow('yuan_y_full', yuan_y_full)
cv2.waitKey(0)
cv2.destroyAllWindows()
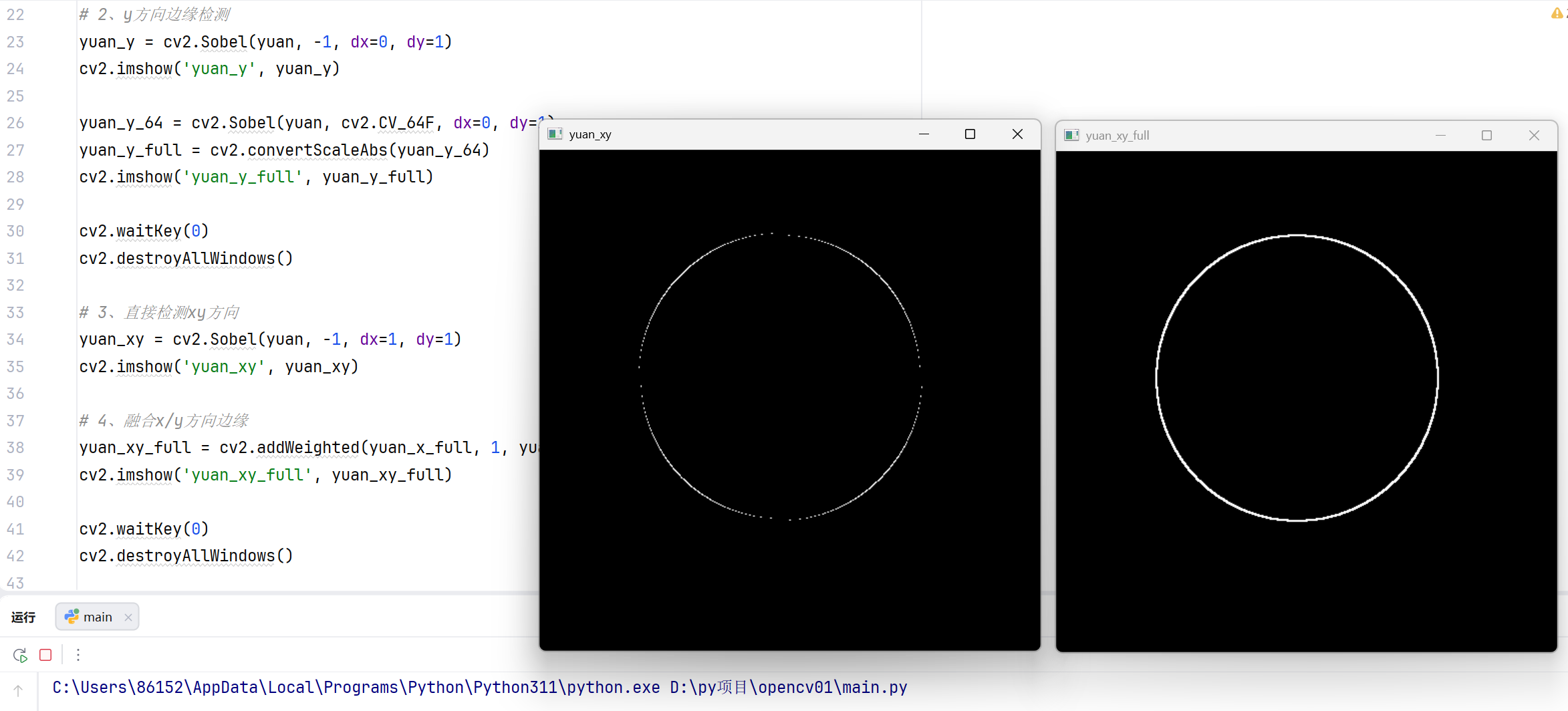
# 3、直接检测xy方向
yuan_xy = cv2.Sobel(yuan, -1, dx=1, dy=1)
cv2.imshow('yuan_xy', yuan_xy)
# 4、融合x/y方向边缘
yuan_xy_full = cv2.addWeighted(yuan_x_full, 1, yuan_y_full, 1, 0)
cv2.imshow('yuan_xy_full', yuan_xy_full)
cv2.waitKey(0)
cv2.destroyAllWindows()4.3 关键说明
- Sobel 的 dx/dy 参数:dx=1、dy=0 检测 x 方向(垂直)边缘,dx=0、dy=1 检测 y 方向(水平)边缘;
- 负数信息丢失问题:图像像素值范围是 0~255(uint8),Sobel 计算的负数会被截断,需用CV_64F保存浮点型,再通过convertScaleAbs转绝对值;
- 边缘融合:直接设置 dx=1、dy=1 的效果差,建议分别计算 x/y 边缘后,用addWeighted融合(权重均为 1,无偏置)。
五、实战 4:进阶边缘检测(Scharr、Laplacian、Canny)
5.1 核心目标
对比 Sobel、Scharr、Laplacian、Canny 四种算法的效果,掌握工业级边缘检测方案(Canny)。
5.2 完整代码与解析
python
import cv2
import numpy as np
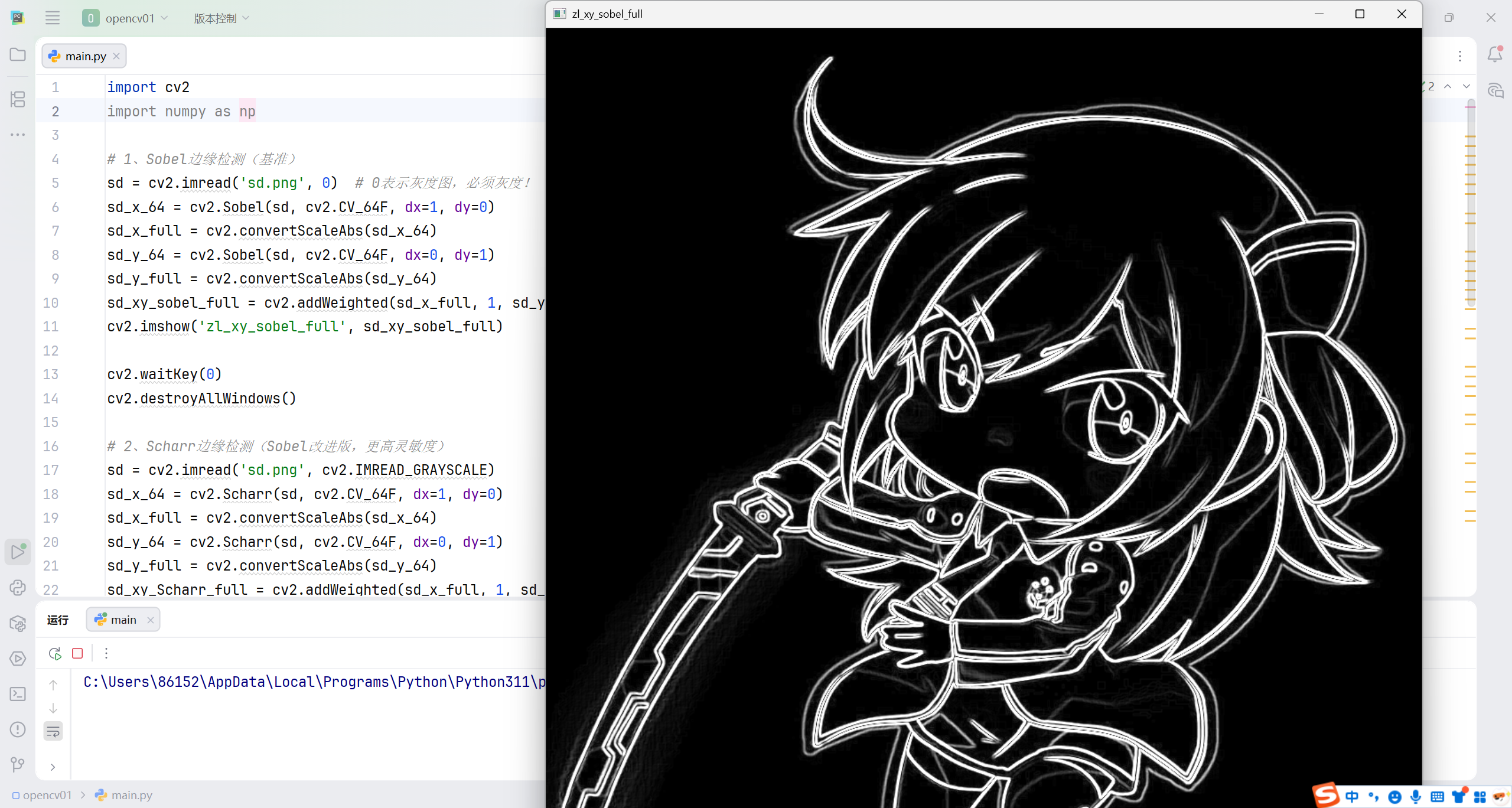
# 1、Sobel边缘检测(基准)
sd = cv2.imread('sd.png', 0) # 0表示灰度图,必须灰度!
sd_x_64 = cv2.Sobel(sd, cv2.CV_64F, dx=1, dy=0)
sd_x_full = cv2.convertScaleAbs(sd_x_64)
sd_y_64 = cv2.Sobel(sd, cv2.CV_64F, dx=0, dy=1)
sd_y_full = cv2.convertScaleAbs(sd_y_64)
sd_xy_sobel_full = cv2.addWeighted(sd_x_full, 1, sd_y_full, 1, 0)
cv2.imshow('zl_xy_sobel_full', sd_xy_sobel_full)
cv2.waitKey(0)
cv2.destroyAllWindows()
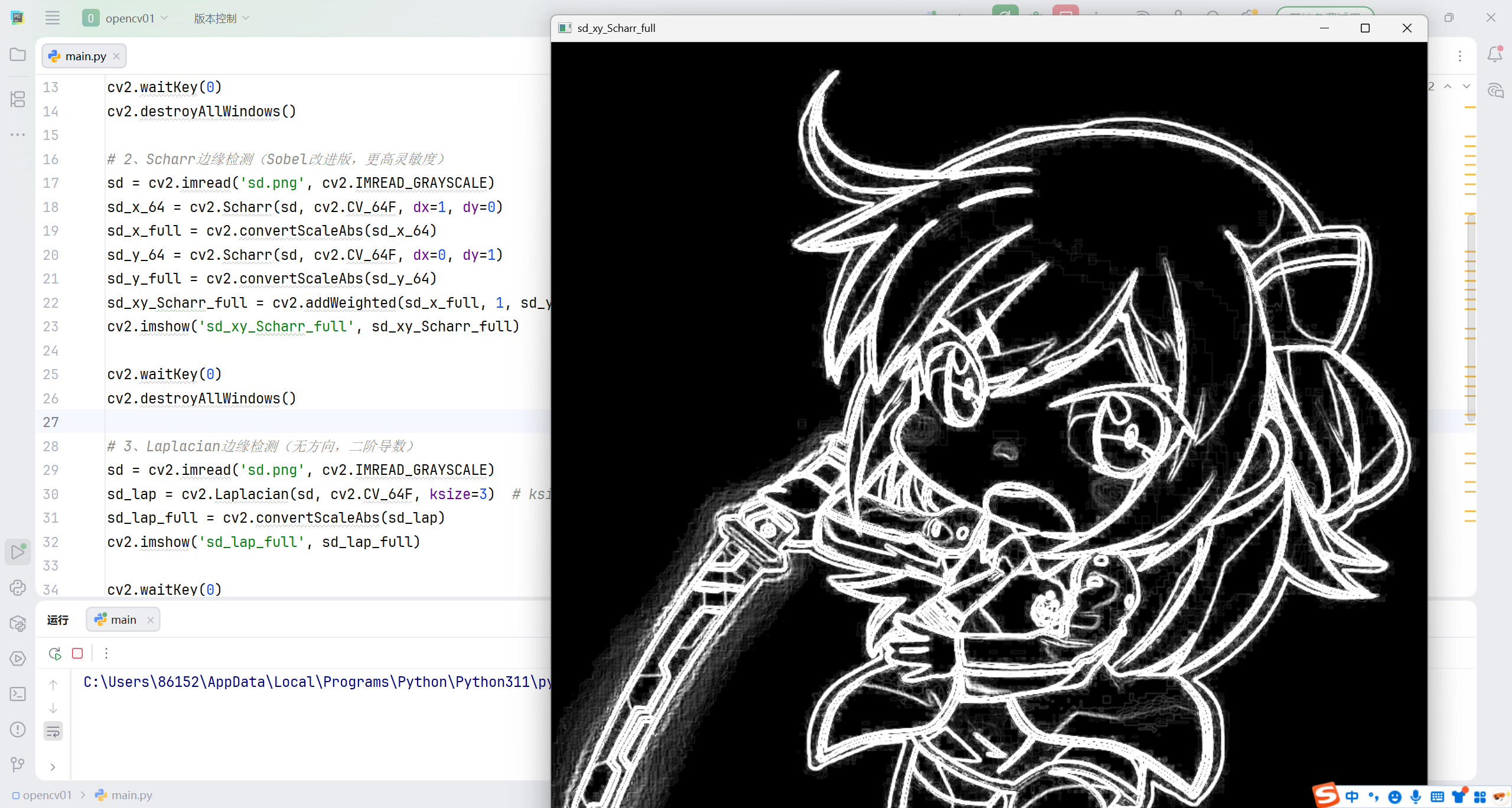
# 2、Scharr边缘检测(Sobel改进版,更高灵敏度)
sd = cv2.imread('sd.png', cv2.IMREAD_GRAYSCALE)
sd_x_64 = cv2.Scharr(sd, cv2.CV_64F, dx=1, dy=0)
sd_x_full = cv2.convertScaleAbs(sd_x_64)
sd_y_64 = cv2.Scharr(sd, cv2.CV_64F, dx=0, dy=1)
sd_y_full = cv2.convertScaleAbs(sd_y_64)
sd_xy_Scharr_full = cv2.addWeighted(sd_x_full, 1, sd_y_full, 1, 0)
cv2.imshow('sd_xy_Scharr_full', sd_xy_Scharr_full)
cv2.waitKey(0)
cv2.destroyAllWindows()
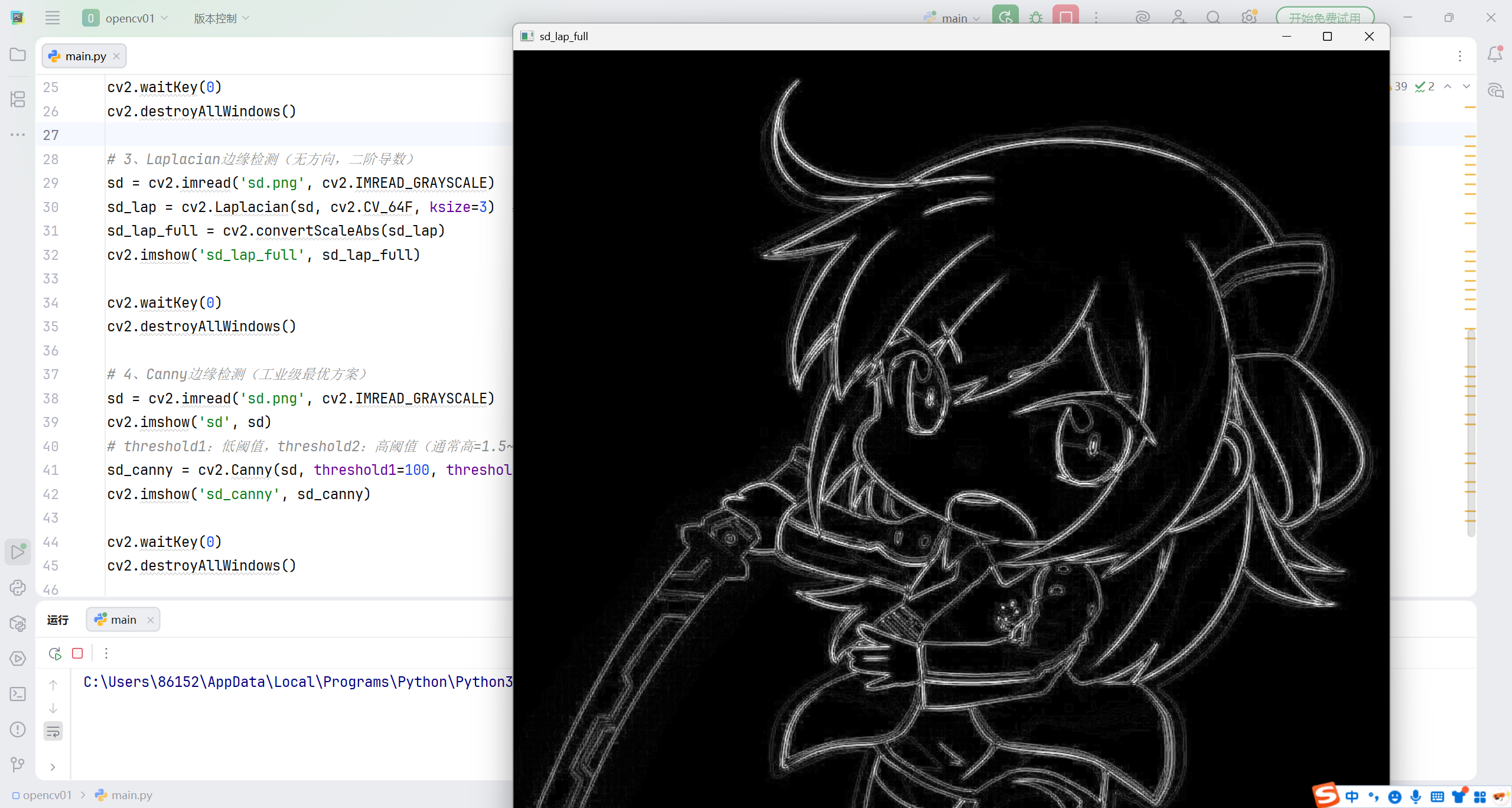
# 3、Laplacian边缘检测(无方向,二阶导数)
sd = cv2.imread('sd.png', cv2.IMREAD_GRAYSCALE)
sd_lap = cv2.Laplacian(sd, cv2.CV_64F, ksize=3) # ksize=3:卷积核大小
sd_lap_full = cv2.convertScaleAbs(sd_lap)
cv2.imshow('sd_lap_full', sd_lap_full)
cv2.waitKey(0)
cv2.destroyAllWindows()
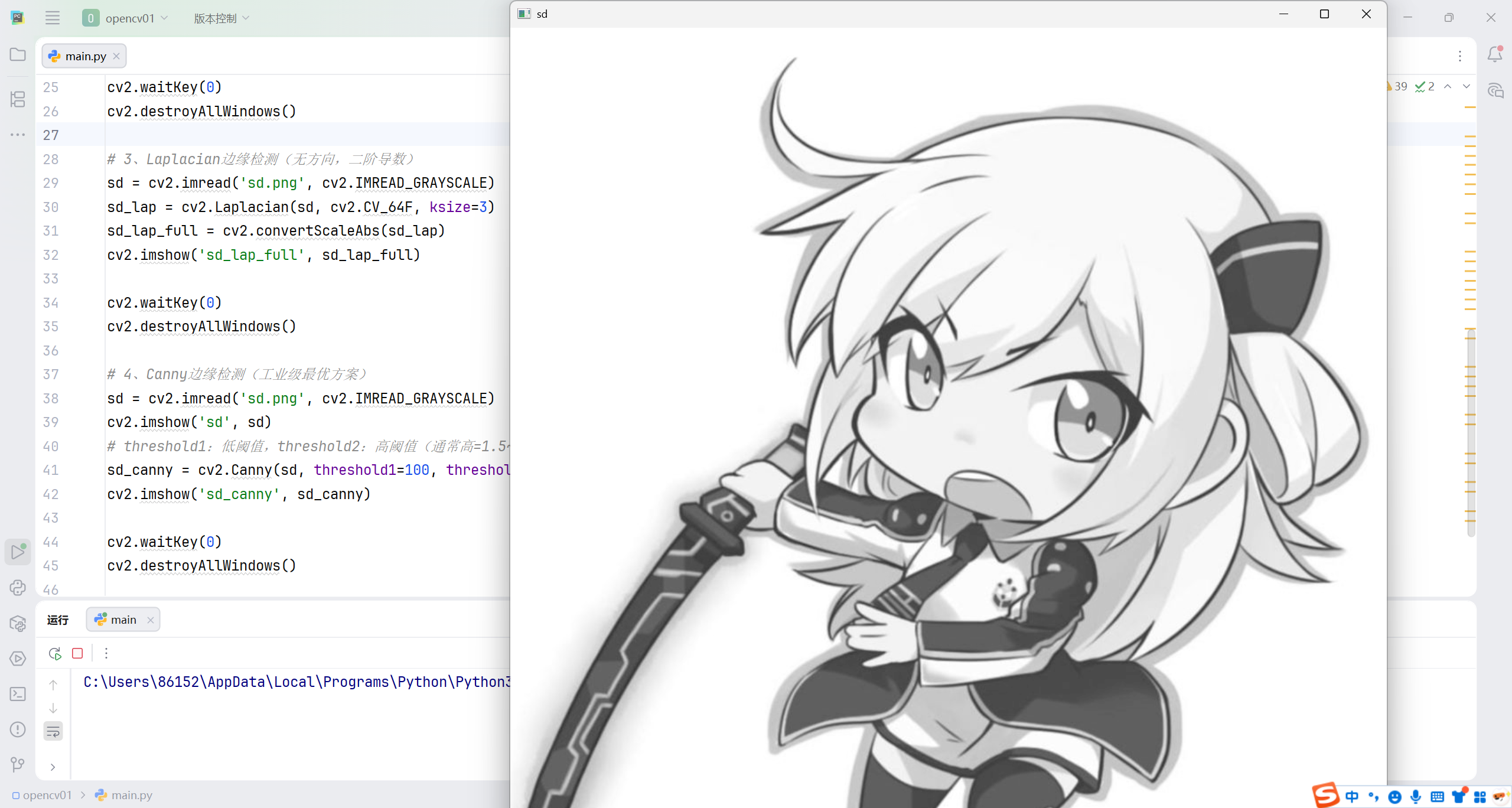
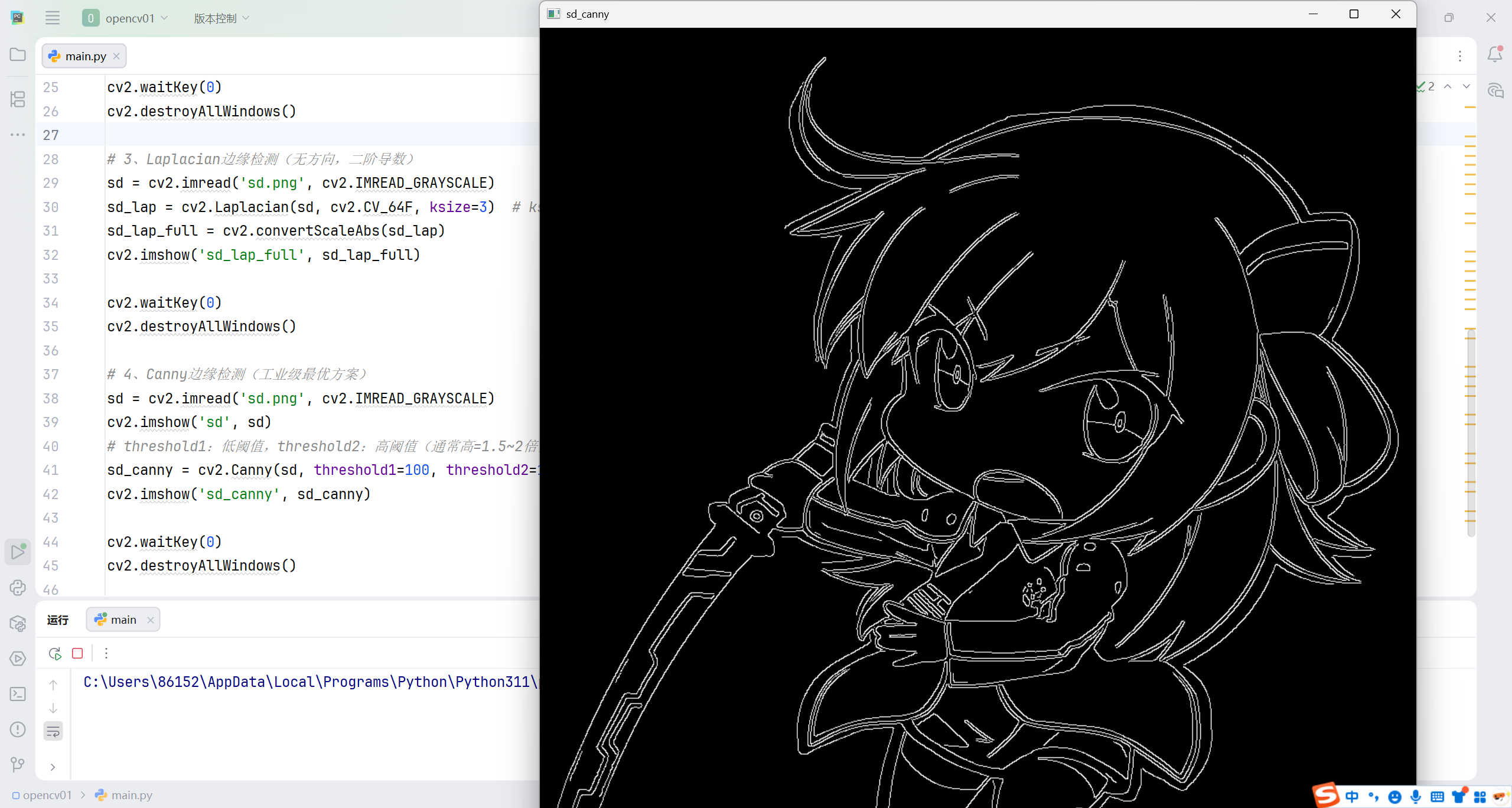
# 4、Canny边缘检测(工业级最优方案)
sd = cv2.imread('sd.png', cv2.IMREAD_GRAYSCALE)
cv2.imshow('sd', sd)
cv2.waitKey(0)
cv2.destroyAllWindows()
# threshold1:低阈值,threshold2:高阈值(通常高=1.5~2倍低)
sd_canny = cv2.Canny(sd, threshold1=100, threshold2=150)
cv2.imshow('sd_canny', sd_canny)
cv2.waitKey(0)
cv2.destroyAllWindows()5.3 关键说明
- Scharr vs Sobel:Scharr 是 Sobel 的优化版,使用更大的卷积核权重,对弱边缘的检测更灵敏,适合细节丰富的图像(如数字图像);
- Laplacian 特点:无方向的边缘检测(无需分 x/y),但对噪声极敏感,需先做高斯模糊再使用;
- Canny 边缘检测 :
- 高斯模糊降噪→2. 计算梯度幅值和方向→3. 非极大值抑制(细化边缘)→4. 双阈值筛选(保留强边缘、连接弱边缘);
- 阈值选择技巧:高阈值 = 1.5~2 倍低阈值,需根据图像实际效果调整(阈值过高→边缘丢失,过低→噪点过多);
- 必须输入灰度图,彩色图会导致检测失效。
七、总结
本文从基础到进阶,完整覆盖了 OpenCV 图像形态学操作与边缘检测的核心内容:
- 形态学操作:腐蚀 / 膨胀是基础,开 / 闭运算适配纹理修复,梯度 / 顶帽 / 黑帽适配细节增强;
- Sobel 边缘检测:需处理负数信息丢失问题,优先融合 x/y 方向边缘;
- 进阶边缘检测:Scharr 增强 Sobel 灵敏度,Laplacian 无方向但易受噪声影响,Canny 是工业级最优方案。
掌握这些技术后,可轻松应用于文字增强、指纹修复、数字边缘提取等实际场景。