
💡Yupureki:个人主页
✨个人专栏:《C++》 《算法》《Linux系统编程》《高并发内存池》
🌸Yupureki🌸的简介:

目录
[1. PageCache框架初识](#1. PageCache框架初识)
[2. PageCache框架构造](#2. PageCache框架构造)
[3. PageCache类初步构造](#3. PageCache类初步构造)
1. PageCache框架初识
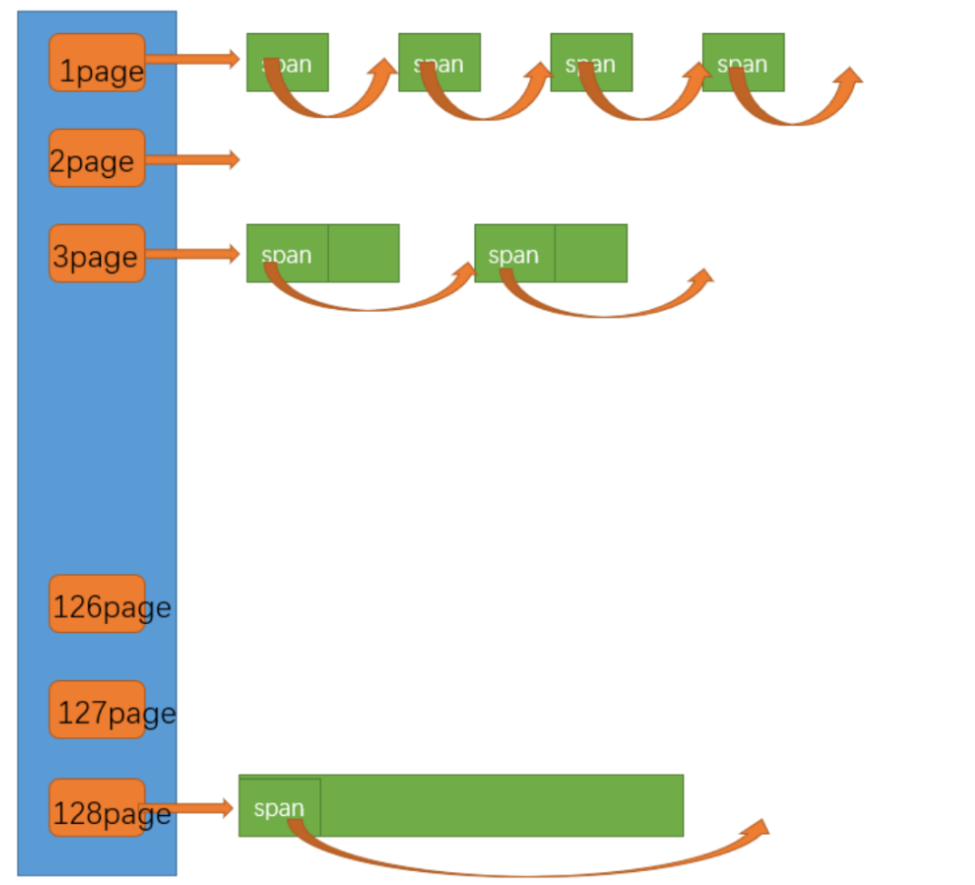
申请内存:
- 当centralcache向pagecache申请内存时,pagecache先检查对应位置有没有span,如果没有则向更大页寻找一个span,如果找到则分裂成两个。比如:申请的是4页page,4页page后面没有挂span,则向后面寻找更大的span,假设在10页page位置找到一个span,则将10页pagespan分裂为一个4页page span和一个6页page span。
- 如果找到_spanList128都没有合适的span,则向系统使用mmap、brk或者是VirtualAlloc等方式申请128页pagespan挂在自由链表中,再重复1中的过程。
- 需要注意的是centralcache和pagecache的核心结构都是spanlist的哈希桶,但是他们是有本质区别的,centralcache中哈希桶,是按跟threadcache一样的大小对齐关系映射的,他的spanlist中挂的span中的内存都被按映射关系切好链接成小块内存的自由链表。而pagecache中的spanlist则是按下标桶号映射的,也就是说第i号桶中挂的span都是i页内存。
释放内存:
- 如果centralcache释放回一个span,则依次寻找span的前后pageid的没有在使用的空闲span,看是否可以合并,如果合并继续向前寻找。这样就可以将切小的内存合并收缩成大的span,减少内存碎片。
2. PageCache框架构造
PageCache具有以下成员变量
- _spanlists:一连串的SpanList哈希桶,每个SpanList中有一定的Span
- mutex:互斥锁,访问PageCache时,需要把整个PageCache锁上
- _pinst:单例模式
- //......最终方案肯定不只这些变量,等以后需要的时候再添加
cpp
//单例模式
class PageCache
{
private:
PageCache()
:_spanlists(NPAGES)
{ }
PageCache(const PageCache&) = delete;
public:
static PageCache& GetInstance()
{
return _pinst;
}
Span* NewSpan(size_t k);//PageCache获取Span,给CentralCache
void Lock()
{
_mtx.lock();
}
void Unlock()
{
_mtx.unlock();
}
void ReleaseSpanToPageCache(Span* span);//CentralCache把多余的Span还给PageCache
private:
std::vector<SpanList> _spanlists;
std::mutex _mtx;
static PageCache _pinst;
};3. PageCache类初步构造
NewSpan:PageCache获取Span,给CentralCache
- 如果PageCache有多余的Span,直接给CentralCache
- 如果没有多余的,则往后找更大的页,然后分割(如没有大小为4页的内存块,向后找到了5页的内存块,则把5页分成4页和1页,4页给CentralCache,1页挂在哈希桶中)
- 如果往后找也没有多余的大内存块,则要从系统中申请128页的大内存块,然后重复步骤2
cpp
// Span* PageCache::NewSpan(size_t k)
// 该方法用于从页面缓存中分配一个包含k个页面的Span对象。
// 如果k大于页面缓存的最大页面数量减一,则直接从系统分配内存。
// 如果k小于等于最大页面数量减一,则尝试从缓存中查找合适大小的Span。
// 如果未找到合适大小的Span,则查找大于k的最小Span,分割并返回k个页面。
// 如果缓存中没有可用的大块内存,则向系统申请最大块的内存并重新尝试分配。
// 获取一个K页的span
Span* PageCache::NewSpan(size_t k)
{
assert(k > 0 && k < NPAGES);
// 先检查第k个桶里面有没有span
if (!_spanLists[k].Empty())
{
return _spanLists->PopFront();
}
// 检查一下后面的桶里面有没有span,如果有可以把他它进行切分
for (size_t i = k+1; i < NPAGES; ++i)
{
if (!_spanLists[i].Empty())
{
Span* nSpan = _spanLists[i].PopFront();
Span* kSpan = new Span;
// 在nSpan的头部切一个k页下来
// k页span返回
// nSpan再挂到对应映射的位置
kSpan->_pageId = nSpan->_pageId;
kSpan->_n = k;
nSpan->_pageId += k;
nSpan->_n -= k;
_spanLists[nSpan->_n].PushFront(nSpan);
return kSpan;
}
}
// 走到这个位置就说明后面没有大页的span了
// 这时就去找堆要一个128页的span
Span* bigSpan = new Span;
void* ptr = SystemAlloc(NPAGES - 1);//SystemAlloc在ObjectPool中实现了
bigSpan->_pageId = (PAGE_ID)ptr >> PAGE_SHIFT;
bigSpan->_n = NPAGES - 1;
_spanLists[bigSpan->_n].PushFront(bigSpan);
return NewSpan(k);
}ReleaseSpanToPageCache涉及到释放内存到系统中,我们等下一节:实现释放内存的章节中再实现