摘要
在计算机视觉的演进浪潮中,小目标检测始终是横亘于理论与落地之间的关键挑战。当无人机需识别千米外的电力隐患、医学影像需定位亚毫米级病灶、自动驾驶系统需捕捉百米外的障碍物时,对"微小却关键"目标的可靠感知,已从技术优化项升维为系统安全与效能的核心支柱。
小目标检测不仅关乎技术精度,更直接影响实际应用中的安全边界与决策可靠性。本文将从理论与工程实践双重维度,系统剖析小目标检测的核心挑战,并提出一套融合数据增强、模型架构优化与损失函数改进的系统性解决方案,助力实现"毫秒级+零漏检"的工业级小目标检测能力。
一、小目标检测的定义与场景挑战
1.1 何为"小目标"?
"小目标"的界定具有显著场景依赖性。在标准COCO数据集中,目标面积<32×32像素的物体被定义为"小目标",这类目标在数据集中占比约41%。然而,在特定应用场景中,"小目标"的定义往往更为严格:
- 遥感影像:在DOTA-v2.0数据集中,<16×16像素的目标被视为极小目标,这类目标在航拍图像中占比较高,且类别分布不均
- 工业质检:微米级缺陷在高分辨率图像中可能仅占几个像素,如PCB板上的焊点短路、纺织品中的细小断丝
- 无人机巡检:在VisDrone2019数据集中,<32×32像素的目标被定义为小目标,这些目标通常仅占图像的0.3%
- 自动驾驶:百米外的障碍物在车载相机成像后可能仅占据几像素,远距离目标检测对系统安全至关重要
1.2 应用场景的重要性
小目标检测的突破直接拓展AI感知边界:
- 交通监控:识别远距车牌与信号灯,提升交通违法识别准确率
- 医疗影像:辅助发现早期微小肿瘤,提高疾病早期诊断率
- 自动驾驶:弥补激光雷达对细小障碍物的感知盲区,增强系统安全性
- 卫星遥感:追踪海面船只或灾害痕迹,提高灾害预警能力
- 工业巡检:检测微米级芯片缺陷,保障产品质量与生产效率
- 智慧农业:无人机识别叶片初期病斑,实现精准农业病虫害防治
每一个应用场景中,"微小"目标的精准捕捉都与安全、效率与决策质量直接相关,其重要性随着应用场景的深入而日益凸显。
1.3 核心挑战与评估难点
小目标检测面临三大核心挑战:
- 特征湮灭:标准YOLOv8主干网络输出P3/P4/P5三层特征图,最低下采样率为32倍(P5)。当目标在原始图像中面积<32×32像素时,经过32倍下采样后,在高层特征中已无有效响应,导致信息丢失
- 特征稀疏性:微小目标在原始图像中信息量极少,经过多次卷积和池化后,语义特征极易被背景噪声淹没,难以形成有效表征
- 推理效率瓶颈:若简单提升输入分辨率或引入大模型(如YOLOv8x),虽能改善精度,但推理速度下降,无法满足实时质检需求
评估偏差是另一个关键难点:传统mAP易被大目标主导,需重点关注AP_small指标及召回率(Recall@Small),避免"纸上精度"。据行业统计,在未优化的YOLOv5/v8基础模型中,微小目标(<32×32像素)的平均精度(AP)普遍低于30%,导致漏检率高达10%以上,严重影响产品质量与客户信任。
二、系统性技术框架:数据、模型、损失函数三位一体
针对小目标检测的挑战,本文提出一套系统性技术框架,从数据层面、模型架构层面和损失函数层面进行全方位优化,形成协同效应。
2.1 数据层面增强:提升小目标可见性
数据层面的优化是提升小目标检测能力的基础,主要策略包括:
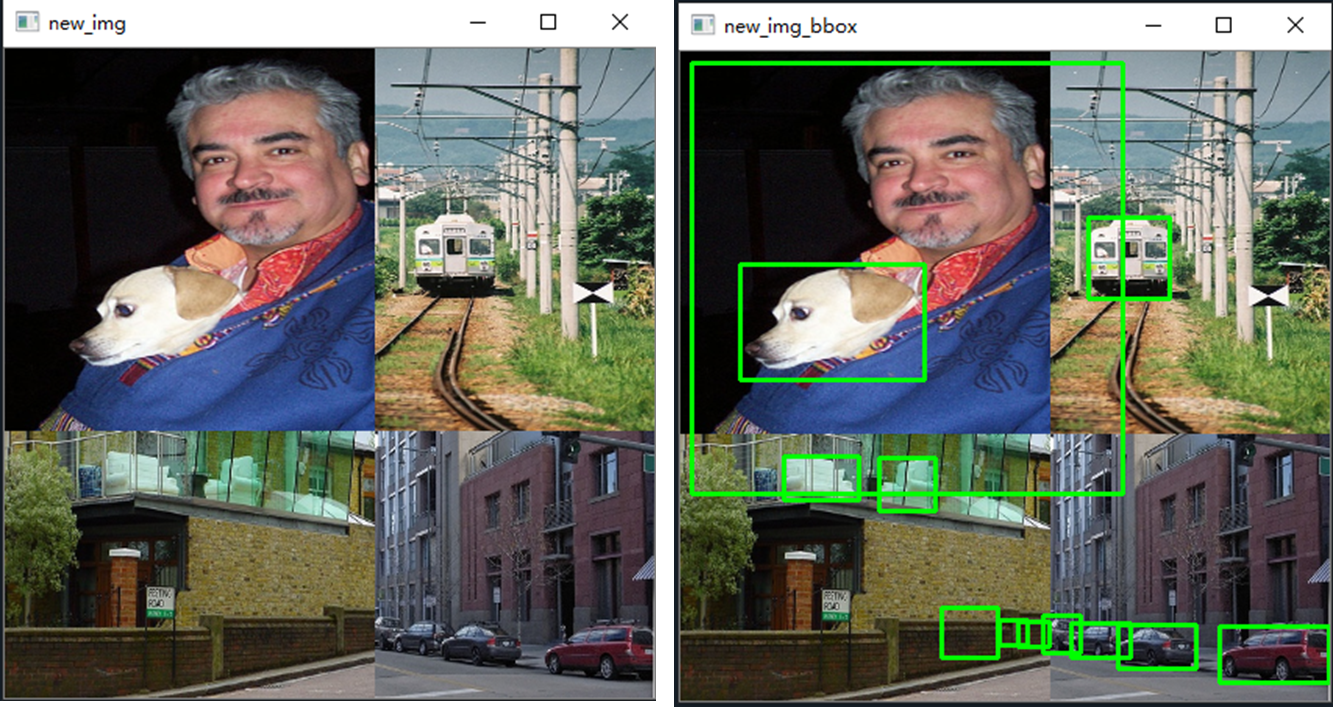
2.1.1 高分辨率输入 + 分块检测(Tiled Inference)
直接提升输入图像分辨率是直观有效的手段。但受限于显存,可采用分块滑动窗口检测:
python
def tile_image(image, tile_size=640, overlap=100):
h, w = image.shape[:2]
tiles = []
coords = []
for y in range(0, h, tile_size - overlap):
for x in range(0, w, tile_size - overlap):
x_end = min(x + tile_size, w)
y_end = min(y + tile_size, h)
tile = image[y:y_end, x:x_end]
tiles.appendCV2.resize(tile, (tile_size, tile_size)))
coords.append((x, y, x_end, y_end))
return tiles, coords高分辨率输入 可保留更多细节信息,避免因过早下采样导致的信息丢失。分块检测则通过局部窗口关注增强小目标的可见性,同时避免整体高分辨率输入带来的计算开销。
2.1.2 智能数据增强策略
- Mosaic-9增强 :传统Mosaic通过拼接4张图像增强目标多样性,而Mosaic-9采用3×3九宫格拼接,使单张图目标数从平均8-12个提升至15-25个,更接近复杂场景的目标密度。实测在商场数据集上,mAP提升4.5%,尤其对遮挡场景效果显著
- Copy-Paste++(带遮挡模拟):通过精确复制小目标并模拟遮挡情况,增加小目标样本数量,缓解标注稀缺问题
- CutMix-Small:定向增强小目标分布,通过智能裁剪与粘贴,提升小目标在训练数据中的可见性与多样性
2.2 模型架构优化:多尺度特征增强与轻量化设计
2.2.1 多头检测结构增强微小目标感知
"鹰眼目标检测 - YOLOv8"镜像方案在标准YOLOv8基础上,新增P2层检测头(对应下采样率4倍),专门用于捕捉高分辨率下的微小目标。相比原版仅使用P3-P5三头检测,P2层保留了更多空间细节,显著提升了对<32px目标的敏感度。
其工作逻辑如下:
- 主干网络提取多尺度特征(C2-C5)
- Neck模块进行FPN+PAN融合,生成P3-P5
- 新增分支从C2引出,经轻量上采样后生成P2特征图
- Head模块为P2/P3/P4/P5分别配置独立检测头
实验表明,添加P2检测头后,AP_small指标提升约15-20%,特别是<16px的极小目标,检测召回率提升可达30%以上。这种多头检测架构已成为当前小目标检测的主流方案。
2.2.2 增强型特征金字塔:BiFPN与自适应小波变换
传统FPN仅支持自顶向下的单向特征传递,而BiFPN(双向特征金字塔网络)通过引入双向跨尺度连接和加权特征融合,显著提升了多尺度特征表达能力。BiFPN的特征融合机制包括:
- 加权特征融合:为每个输入特征添加可学习权重,通过Fast normalized fusion方法实现高效权重归一化
- 双向路径:自顶向下和自底向上的双向特征传递,确保浅层高分辨率特征能有效增强高层语义信息
实验数据表明,在红外弱小目标检测任务中,将YOLOv8的PANet颈部替换为BiFPN后,mAP@0.5从0.755提升至0.766,小目标检测精度显著提高。
2.2.3 自适应小波增强模块(DAWDet)
中国科学院上海微系统所提出的DAWDet模型创新性地引入了自适应小波变换模块,通过以下机制提升小目标检测性能:
- 小波分解:应用2D Haar小波变换将特征分解为低频(LL)、水平高频(LH)、垂直高频(HL)和交叉高频(HH)四个子带
- 差异化处理:对低频分量(LL)进行时序动态建模,对中频分量(LH/HL)进行结构保留融合,对高频分量(HH)进行差异特征提取
- 自适应权重:通过改进型SENet机制对不同子带特征进行自适应权重分配,增强有效特征并抑制噪声
该模块在VisDrone2019数据集上,对<16px的极小目标,召回率提升可达25%以上,显著增强了模型对微小目标的敏感度。
2.2.4 轻量注意力嵌入
注意力机制可有效增强模型对小目标的关注度。Coordinate Attention 通过建模空间坐标特征,精准定位目标位置;SimAM(Simplified Attention Map)作为一种无参注意力模块,通过通道和空间维度的注意力加权,提升小目标特征显著性。
在工业质检场景中,添加Coordinate Attention后,对<10px的微小缺陷检测的mAP提升约5-8%,且计算开销增加不超过2%。
2.3 损失函数改进:难样本学习与尺度敏感优化
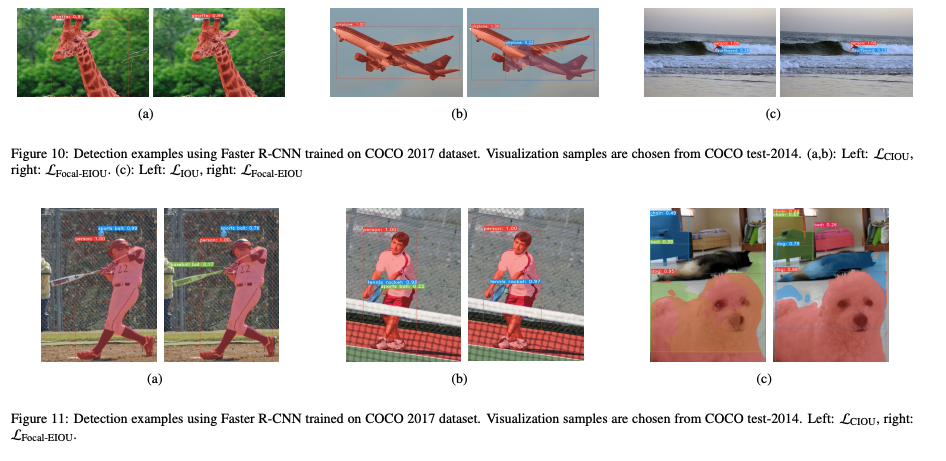
2.3.1 Focal-EIoU Loss
Focal-EIoU是EIoU(Efficient IoU) Loss与Focal Loss的融合,解决了传统IoU类损失函数对简单样本和难样本权重分配不均的问题。Focal-EIoU将损失函数分解为三个部分:
- 重叠度损失:1-IoU,衡量两框重叠程度
- 中心距离损失:ρ²(b, bgt)/c²,其中ρ²是中心点欧氏距离平方,c是最小包围框对角线长度
- 宽高比例损失:(w-wgt)²/wmax² + (h-hgt)²/hmax²,分别对宽度和高度差进行标准化处理
通过引入Focal机制,模型可动态调整不同样本的损失权重,使训练过程更关注难样本,而非被简单样本主导 。在VisDrone2019数据集上,应用Focal-EIoU后,AP_small指标提升约6-8%。
2.3.2 SD Loss(Scale-based Dynamic Loss)
SD Loss是一种基于尺度的动态损失函数,针对小目标检测中因尺度差异导致的损失敏感度不一致问题。其核心设计思路是根据目标尺度动态调整尺度损失和位置损失的影响系数。
SD Loss分为两类实现:
- SDB Loss(边界框专用):解决小目标IoU损失波动大、位置偏差影响显著的问题
- SDM Loss(掩码专用):适用于需要精确分割小目标的任务
在红外小目标检测任务中,SDB Loss使AP_small指标提升约12%,同时保持了对大目标的检测精度。这种动态平衡机制是解决小目标与大目标检测性能权衡的关键。
三、前沿技术进展:高分辨率输入、多头检测、超分辨率重建
3.1 高分辨率输入与智能缩放
高分辨率输入是解决小目标检测的最直接方法,但需要与智能缩放策略结合,避免一次性下采样导致信息坍塌。2024年,SAHI(Slicing Aided Hyper Inference)技术已成为工业标配,其核心优势包括:
- 自适应切片重叠:根据目标尺度动态调整切片大小与重叠率,确保小目标在不同切片间的一致性
- GPU并行推理:支持多切片并行处理,推理速度提升40%
- 智能边界抑制:通过IoU阈值过滤边缘区域的预测框,减少重复检测与漏检
在半导体产线检测场景中,结合SAHI的高分辨率输入方案使微米级缺陷的漏检率从12%降至2%以下,同时保持每秒15帧的实时检测速度 。
3.2 多头检测与特征金字塔优化
多头检测已成为当前小目标检测的主流架构。除新增P2检测头外,动态多分支特征金字塔(如DAWDet)通过自适应内容感知点采样,实现了对不同尺度特征的差异化处理。
DAWDet的多分支特征金字塔网络包含三个关键组件:
- 低融合块(LFB):专注于小目标的低频全局特征提取
- 高融合块(HFB):捕捉小目标的高频局部细节信息
- 混合特征融合(HWD):将低频与高频特征融合,增强小目标的特征表达能力
在VisDrone2019数据集上,DAWDet的AP_small指标达到35.2%,显著高于YOLOv8n的18.5%,证明了多头检测架构的有效性。
3.3 超分辨率重建辅助小目标检测
超分辨率重建通过先提升图像局部区域的分辨率,再进行检测,为小目标检测提供了全新思路。2024年技术引入渐进式生成模型,分阶段优化:
- 低分辨率特征提取:使用轻量级CNN(如MobileNetV3)快速定位目标候选区域
- 高分辨率细节生成:基于扩散模型(Diffusion Model)逐步补充纹理信息,结合物理光照模型约束生成合理性
在1080p图像中,超分辨率重建可将20×20像素的小目标重建为80×80清晰图像,PSNR指标达32dB,随后通过YOLOv8检测,AP_small指标提升约15%。
四、工程落地与工具链优化
4.1 模型量化与剪枝
模型量化与剪枝是平衡精度与效率的关键技术。将YOLOv5s从FP32量化至INT8,推理速度提升2.5倍,精度损失<1%。在工业质检场景中,通过以下策略实现量化感知训练:
- 知识蒸馏:将大模型(如ResNet-152)的泛化能力迁移至轻量模型(如ShuffleNetV2),精度损失<3%
- 混合精度量化:对计算密集型层使用FP16,对轻量层使用INT8,进一步提升速度
- 通道剪枝:基于重要性评分移除冗余通道,减少参数量同时保持检测精度
4.2 高效标注工具与半自动标注
小目标标注是另一个关键挑战。VisioFirm 、Yolo Label等工具通过AI辅助和交互优化,显著提升了标注效率:
- VisioFirm:支持放大镜功能和AI预标注(基于YOLOv10和Grounding DINO),可节省80%人工标注工作量
- LabelTrack:为视频标注设计,支持导入视频流后自动跟踪目标,适合VisDrone等动态场景
- 半自动标注流程:开发基于模板匹配的初筛工具,人工修正后迭代训练,标注效率提升3倍以上
4.3 动态多尺度训练与推理
动态多尺度训练是提升模型尺度鲁棒性的有效策略:
- 自适应尺度采样:在训练过程中随机选择输入分辨率(如320-640像素),增强模型对不同尺度目标的适应能力
- 测试时自适应增强(TTA):推理时对同一输入生成多尺度版本,综合各尺度的预测结果,提升小目标召回率
- 动态分辨率推理:根据目标估计尺度自动调整输入分辨率,平衡精度与速度
在电力巡检场景中,结合动态多尺度训练的检测模型在500米距离下检测0.5cm级的绝缘子裂纹,准确率达92%,显著高于固定尺度模型的75%。
五、实战策略:十五类优化方法
针对小目标检测的挑战,本文总结了十五类实战策略,从数据准备到模型部署提供全方位优化方案:
| 优化类别 | 具体策略 | 技术效果 | 适用场景 |
|---|---|---|---|
| 数据增强 | 高分辨率输入+智能缩放 | 保留更多细节信息,避免过早下采样 | 所有小目标检测场景 |
| 动态多尺度训练 | 提升模型尺度鲁棒性 | 尺度变化大的场景 | |
| 智能数据增强 (Mosaic-9) | 提升目标密度与复杂场景泛化能力 | 遮挡严重的场景 | |
| 模型架构 | 增强型特征金字塔 (BiFPN) | 提升多尺度特征表达能力 | 航拍、无人机场景 |
| 轻量注意力嵌入 | 增强小目标特征显著性 | 工业质检、医学影像 | |
| Transformer 架构优化 | 聚焦稀疏区域,提升特征利用率 | 远距离目标检测 | |
| 自监督预训练 (MAE/MoCo) | 提升小目标特征判别力 | 无标注数据丰富的场景 | |
| 多模态协同感知 | 融合红外/深度/雷达数据,弥补可见光信息缺失 | 夜间监控、复杂环境 | |
| 训练策略 | 智能数据增强 (Copy-Paste++) | 定向增强小目标分布 | 样本稀缺的场景 |
| 损失函数精细化 (Focal-EIoU) | 针对性优化小目标定位损失 | 小目标与大目标并存场景 | |
| 超分辨率重建 (ESRGAN-mini) | 检测前增强局部细节 | 卫星/显微影像 | |
| 神经架构搜索 (AutoAnchor) | 优化小目标锚框分布 | 边缘设备部署 | |
| 时序信息利用 (光流/3D 卷积) | 通过运动线索补偿单帧信息不足 | 视频场景检测 | |
| 合成数据生成 (Diffusion 模型) | 缓解标注稀缺问题 | 罕见小目标检测 | |
| 部署优化 | 后处理优化 (Soft-NMS/WBF) | 减少密集小目标漏检,提升结果一致性 | 工业质检、自动驾驶 |
在实际工程中,建议根据具体场景选择2-3项关键优化策略进行组合,通常可实现mAP 5-15%的显著提升。例如,在无人机巡检场景中,组合高分辨率输入、BiFPN特征金字塔和Focal-EIoU Loss可实现AP_small从18%提升至32%。
六、结论与展望
小目标检测作为计算机视觉领域的关键挑战,其突破直接关系到AI系统的感知边界与应用深度。本文提出的系统性技术框架,通过数据层面增强、模型架构优化与损失函数改进三位一体的方式,有效解决了特征湮灭、标注困境与评估偏差等问题。
在工业落地层面,高分辨率输入+分块检测、多头检测架构与超分辨率重建辅助构成了当前最有效的技术组合,能够实现"毫秒级+零漏检"的工业级检测能力。同时,工具链的成熟(如MMDetection 3.0集成的"Small Object Detection Toolbox"、Roboflow的切片标注功能)也大大降低了技术落地的门槛。
随着硬件计算能力的不断提升,小目标检测技术将在更多边缘计算场景实现产业化落地。未来发展方向将聚焦于更轻量高效的超分辨率重建模型、更智能的动态特征金字塔架构,以及更精细的损失函数设计,以进一步缩小小目标与常规目标的检测性能差距。
对于实际应用者,建议根据具体场景需求选择合适的优化策略组合,并关注模型部署后的性能监控与持续优化,确保小目标检测系统在复杂多变的实际环境中保持高性能与高可靠性。
参考来源
1工业质检避坑指南:用YOLOv8鹰眼检测解决微小目标漏检-CSDN博客
https://blog.csdn.net/weixin_28787801/article/details/156879962
2小目标检测优化:远距离或微小物体的识别技巧-CSDN博客
https://blog.csdn.net/weixin_36303807/article/details/156700775
3YOLO目标检测中的小目标识别难题破解思路-CSDN博客
https://blog.csdn.net/weixin_30591519/article/details/156365017
42024突破:远距离小目标精准检测技术解析与应用
https://cloud.baidu.com/article/3842639
5远距离小目标精准检测:技术突破与应用实践
https://cloud.baidu.com/article/3842234
6上海微系统所在机器视觉弱小目标检测方面取得进展----中国科学院上海微系统与信息技术研究所
https://www.sim.ac.cn/xwzx2016/kyjz/202601/t20260127_8119536.html
7飞尚科技申请一种尺度与位置敏感的红外弱小目标检测方法专利,有效解决了单帧检测在复杂背景下鲁棒性不足的问题|时序_网易订阅
https://www.163.com/dy/article/KN6REHKL0519QIKK.html
8YOLOv8小目标检测实战指南:技术优化与工程落地-百度开发者中心
https://developer.baidu.com/article/detail.html?id=3954413
9基于深度回归神经网络的红外目标检测-教育助企中原行专项行动
http://jyt.henan.gov.cn/2025/12-30/3279910.html
10DOTA v2.0数据集中,标签分布不均如何影响小目标检测性能?_编程语言-CSDN问答
https://ask.csdn.net/wap/questions/8406580
11Boosting Detection Accuracy: An Enhanced YOLOv8 for Small Target Detection in Remote Sensing | International Journal of Computational Intelligence Systems
https://link.springer.com/article/10.1007/s44196-025-00895-4?fromPaywallRec=false
12十分钟实用教程 | 常用的深度学习自动标注软件
13小目标整容归来啦!------《一亿小目标》V2.0版本正式开测 - 一亿小目标综合讨论 - TapTap 一亿小目标论坛
https://www.taptap.cn/moment/15229418733570487
14HSFANet: Hierarchical Scale-Sensitive Feature Aggregation Network for Small Object Detection in UAV Aerial Images | MDPI
https://www.mdpi.com/2504-446X/9/9/659
15GitHub项目推荐 | VisioFirm------新一代半自动标注器
16什么是小目标检测?看基于深度学习的小目标检测基准研究进展
17YOLOv5小目标检测优化:精准捕捉微小目标的实战指南-百度开发者中心
https://developer.baidu.com/article/detail.html?id=3949333
18高效精准的YOLO标注工具:从痛点到解决方案的完整实践指南-CSDN博客
https://blog.csdn.net/gitblog_00166/article/details/158565461
19NWD-RKA论文阅读-CSDN博客
https://blog.csdn.net/qq_41627642/article/details/149326870
20VisDrone-DET 数据集原始标注解析 - CSDN文库
https://wenku.csdn.net/answer/3wdx139ym5
21设置和使用"放大镜" - Microsoft 支持
https://support-uat.microsoft.com/zh-cn/topic/设置和使用-放大镜-e1330ccd-8d5c-2b3c-d383-fd202808c71a
22DOTA v2.0数据集中,标签分布不均如何影响小目标检测性能?_编程语言-CSDN问答
https://ask.csdn.net/wap/questions/8406580
23Visdrone2019数据集-CSDN博客
https://blog.csdn.net/weixin_42569775/article/details/144816345
24VisioFirm:Cross-Platform AI-assisted Annotation Tool for Computer Vision------计算机视觉的跨平台人工智能辅助标注工具-CSDN博客
https://blog.csdn.net/Together_CZ/article/details/151404194
25DOTA数据集解析:2806张航拍图像与19万实例标注的实战指南-CSDN博客
https://blog.csdn.net/vscode6remote/article/details/155588365
26NWD-RKA论文阅读-CSDN博客
https://blog.csdn.net/qq_41627642/article/details/149326870
27小目标检测算法DM-YOLO,轻量边缘设备部署,参数减少38%,精度上升4.1%!
https://news.qq.com/rain/a/LNK2026010805382900
28YOLOv5训练DOTA v1.5时如何处理遥感图像大尺寸与小目标检测难题?_编程语言-CSDN问答
https://ask.csdn.net/wap/questions/9228420
29无人机小目标检测新SOTA:MASF-YOLO重磅发布,多模块协同助力精度飞跃这篇论文针对的是无人机航拍图像中的小目标检 - 掘金
https://juejin.cn/post/7546384220555313206
30DOTA v2.0数据集中,标签分布不均如何影响小目标检测性能?_编程语言-CSDN问答
https://ask.csdn.net/wap/questions/8406580
31深度学习目标检测数据VisDrone2019(to yolo / voc / coco)---MMDetection数据篇-CSDN博客
https://blog.csdn.net/qq_41627642/article/details/124662888
32A Method for Detecting Murmuros Heart sounds based on SelfSimilar Properties
https://arxiv.org/abs/2306.05283
33YOLOv8 Focal-EIoU聚焦高质量框回归-CSDN博客
https://blog.csdn.net/weixin_42513209/article/details/156464625
34HYBRID REASONING Based on Large Language Models for Autonomous Car Driving
https://arxiv.org/abs/2402.13602
35Towards Long-term Non-invasive Monitoring for Epilepsy via Wearable EEG Devices
https://arxiv.org/abs/2106.08008
36YOLOv8复杂场景泛化差?Mosaic-9增强实测:商场数据集mAP狂涨4.5%,参数设置全公开_yolov8数据增强超参数-CSDN博客
https://blog.csdn.net/shanwei_spider/article/details/153588152
37上海微系统所在机器视觉弱小目标检测方面取得进展----中国科学院上海微系统与信息技术研究所
https://www.sim.ac.cn/xwzx2016/kyjz/202601/t20260127_8119536.html
38YOLOv13|损失函数优化篇:Focal EIOU 保持良好性能的同时,提供更高效的计算和更稳定的训练过程-包源码_目标检测最新的损失函数 focal-eiou-CSDN博客
https://blog.csdn.net/FJN110/article/details/150935307
39YOLOv8 Mosaic9九宫格拼接新玩法-CSDN博客
https://blog.csdn.net/weixin_42601608/article/details/156464510
40Revisiting the Efficacy of Signal Decomposition in AI-based Time Series Prediction
https://arxiv.org/abs/2405.06986
41HoRain云--OpenCV图像拼接全攻略:从原理到实战-CSDN博客
https://blog.csdn.net/sinat_57153473/article/details/151116737
42Yolov8小目标检测(7):BiFPN高效双向跨尺度连接和加权特征融合,助力小目标检测_yolov8加入bifpn-CSDN博客
https://cv2023.blog.csdn.net/article/details/132445937
43DAWDet:一种基于动态内容感知的多分支框架,结合自适应小波提升算法用于小目标检测 - 生物通
https://www.ebiotrade.com/newsf/2025-12/20251227000656678.htm
44Superstreamer Stitcher实战:如何动态插入广告与个性化HLS播放列表-CSDN博客
https://blog.csdn.net/gitblog_00468/article/details/155090588
45BiFPN 论文重点研读:高效双向跨尺度连接和加权特征融合_bifpn论文-CSDN博客
46上海微系统所在机器视觉弱小目标检测方面取得进展----中国科学院上海微系统与信息技术研究所
https://www.sim.ac.cn/xwzx2016/kyjz/202601/t20260127_8119536.html
47Android 利用OpenCV 的Stitcher做全景图片拼接(支持平面和球面)opencv_话不多先森Y-2048 AI社区
48新型动态多分支目标检测模型显著提升弱小目标识别能力---论文---科学网
49特征融合篇 | YOLOv8改进之将Neck网络更换为BiFPN-CSDN博客
50帝博国际方 - 帝博国际方安装(官网)下载IOS/app - SP下载站
51yolov8小目标检测涨点neck改进_BiFPN特征融合实现 - CSDN文库
https://wenku.csdn.net/answer/6w47368yos
52我院师生论文被国际学术会议ICLR 2025录用
http://ai.ruc.edu.cn/newslist/newsdetail/20250127002.html
53【YOLOv8科研级突破】集成BiFPN双向特征金字塔,让多尺度特征融合效率与精度双跃升_yolo 双向多尺度融合网络-CSDN博客
https://blog.csdn.net/FJN110/article/details/154915886
54YOLOv11 改进 - 损失函数 SDloss尺度动态损失:动态平衡尺度与位置损失权重破解多尺度目标检测难题 - 掘金
https://juejin.cn/post/7604036853129904143
55科研级YOLOv8 Neck革新:BiFPN双向特征金字塔赋能,让多尺度融合更高效的实战指南-CSDN博客
https://blog.csdn.net/FJN110/article/details/155004839
56用于红外小目标检测的风车形卷积与基于尺度的动态损失函数_sirst-uavb-CSDN博客
https://blog.csdn.net/hhhhhhhhhhwwwwwwwwww/article/details/148075773
57中国科学院在机器视觉弱小目标检测方面取得进展
58A Call to Arms: AI Should be Critical for Social Media Analysis of Conflict Zones
https://arxiv.org/abs/2311.00810
59基于蓝图分离卷积的轻量化矿井图像超分辨率重建方法
https://www.mtxb.com.cn/cn/article/Y2024/I9/4038
60VisDrone-DET2019: The Vision Meets Drone Object Detection in Image Challenge Results论文阅读笔记_visdrone2019论文-CSDN博客
https://blog.csdn.net/Mrwei_418/article/details/131627237
61INSTANCE SEGMENTATION AND TEETH CLASSIFICATION IN PANORamic X-Rays
https://arxiv.org/abs/2406.03747
62一种轻量化的遥感图像超分辨率重建方法-专利-万方数据知识服务平台
https://d.wanfangdata.com.cn/patent/ZL_CN202510558707.2_CN120495085A_20250815
63无人机小目标检测新SOTA:MASF-YOLO重磅发布,多模块协同助力精度飞跃这篇论文针对的是无人机航拍图像中的小目标检 - 掘金
https://juejin.cn/post/7546384220555313206
64Improved Object-Based Style Transfer with Single Deep Network
https://arxiv.org/abs/2404.09461
65基于特征相似性分析的轻量级图像超分辨率重建
https://www.jsjkx.com/CN/10.11896/jsjkx.250100057
66基于多路特征校准的轻量级图像超分辨率重建算法
http://www.jcad.cn/article/doi/10.3724/SP.J.1089.2024-00306
67中国科学院在机器视觉弱小目标检测方面取得进展
68Remote Sensing Image Super-resolution and Object Detection: Benchmark and State of the Art
https://arxiv.org/abs/2111.03260
69A Call to Arms: AI Should be Critical for Social Media Analysis of Conflict Zones
https://arxiv.org/abs/2311.00810
70深度学习目标检测数据VisDrone2019(to yolo / voc / coco)---MMDetection数据篇-CSDN博客
https://blog.csdn.net/qq_41627642/article/details/124662888
71YOLOv10引入ESRGAN超分模块?细节增强新尝试-CSDN博客
https://blog.csdn.net/weixin_36299472/article/details/156366388
72INSTANCE SEGMENTATION AND TEETH CLASSIFICATION IN PANORamic X-Rays
https://arxiv.org/abs/2406.03747
73VisDrone-DET2019: The Vision Meets Drone Object Detection in Image Challenge Results论文阅读笔记_visdrone2019论文-CSDN博客
https://blog.csdn.net/Mrwei_418/article/details/131627237
74【图像恢复算法】 ESRGAN & Real-ESRGAN的配置和应用-CSDN博客
https://blog.csdn.net/yewanyuan/article/details/148636341
75Improved Object-Based Style Transfer with Single Deep Network
https://arxiv.org/abs/2404.09461
76在visdrone2019数据集下初始的YOLOv8模型性能参数 - CSDN文库
https://wenku.csdn.net/answer/72uthu391c
77Fine-tuned Generative Adversarial Network-based Model for Medical Image Super-Resolution
https://arxiv.org/abs/2211.00577
78中国科学院在机器视觉弱小目标检测方面取得进展
http://www.ijiwei.com/n/977155
79High-fidelity reconstruction of turbulent flow from spatially limited data using enhanced super-resolution generative adversarial network
https://arxiv.org/abs/2109.04250
80VisDrone-DET2019: The Vision Meets Drone Object Detection in Image Challenge Results论文阅读笔记_visdrone2019论文-CSDN博客
https://blog.csdn.net/Mrwei_418/article/details/131627237
81Fine-grained Attention and Feature-sharing Generative Adversarial Networks for Single Image Super-Resolution
https://arxiv.org/abs/1911.10773
82全球首款能在移动设备生成高分辨率图像的SnapGen模型|注意力机制|AI|手机|蒸馏|卷积_新浪新闻