视频讲解:https://www.bilibili.com/video/BV1PTwTzUEq5/?vd_source=5ba34935b7845cd15c65ef62c64ba82f
代码仓库:https://github.com/LitchiCheng/mujoco-learning
上期视频《Mujoco 仿真棋格盘标定相机内参方法》中我们得到了相机的内参,结合之前Apriltag的标签获取,今天介绍一下在Mujoco的相机视野下通过solvepnp计算得到apriltag的位姿。
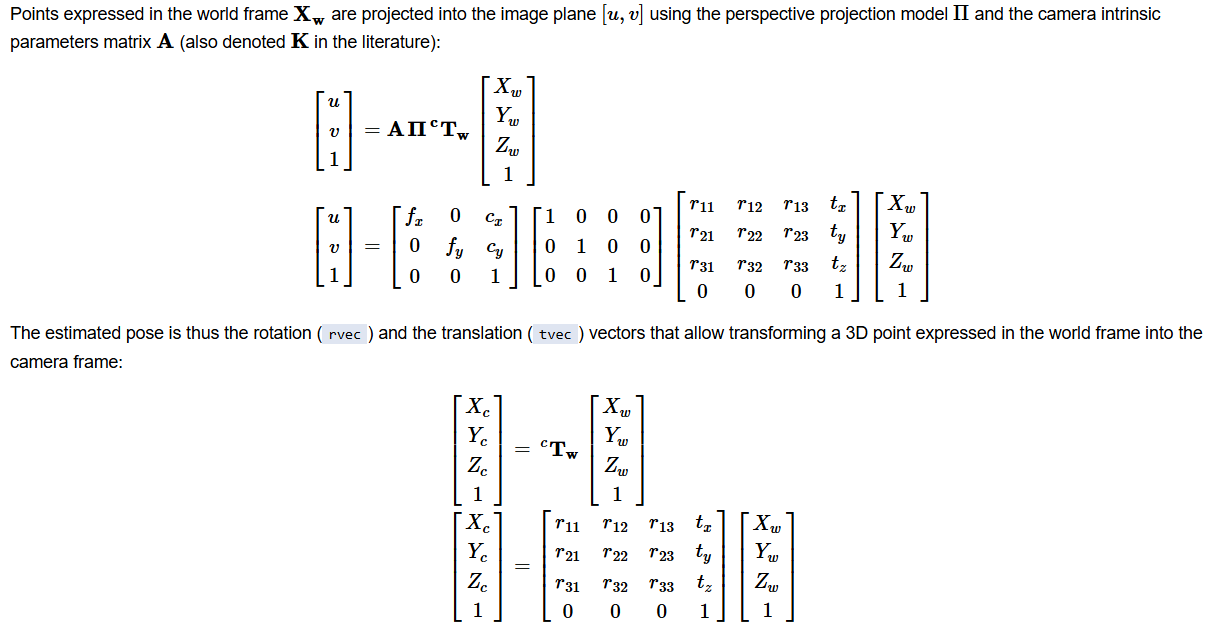
参考 https://docs.opencv.ac.cn/4.11.0/d5/d1f/calib3d_solvePnP.html 使用opencv的solvepnp,首先需要传入内参,畸变参数,tag的大小
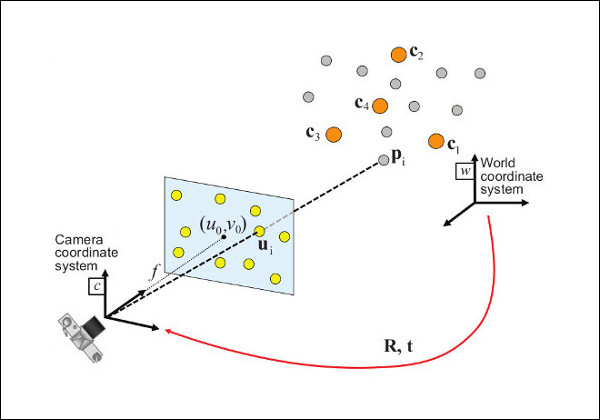
原理:得到在相机坐标系下的位姿和在世界坐标系下的位姿,一般情况下是无法得到两个坐标系的变换关系,有无穷种解,但当描述的物体是同一个或已知物体之间的变换干系,那么就可以根据如下
安装cv2,uv pip install cv2 即可
TAG_SIZE = 0.1
# 格式:[[fx, 0, cx], [0, fy, cy], [0, 0, 1]]
# fx/fy: 焦距, cx/cy: 主点坐标
CAMERA_MATRIX = np.array([
[415.019, 0.0, 318.59934938],
[0.0, 415.294660431, 242.1195262],
[0.0, 0.0, 1.0]
], dtype=np.float32)
DIST_COEFFS = np.array([-0.00201 , 0.00547 ,-0.0003586 ,-0.00020906 ,-0.00284597], dtype=np.float32)
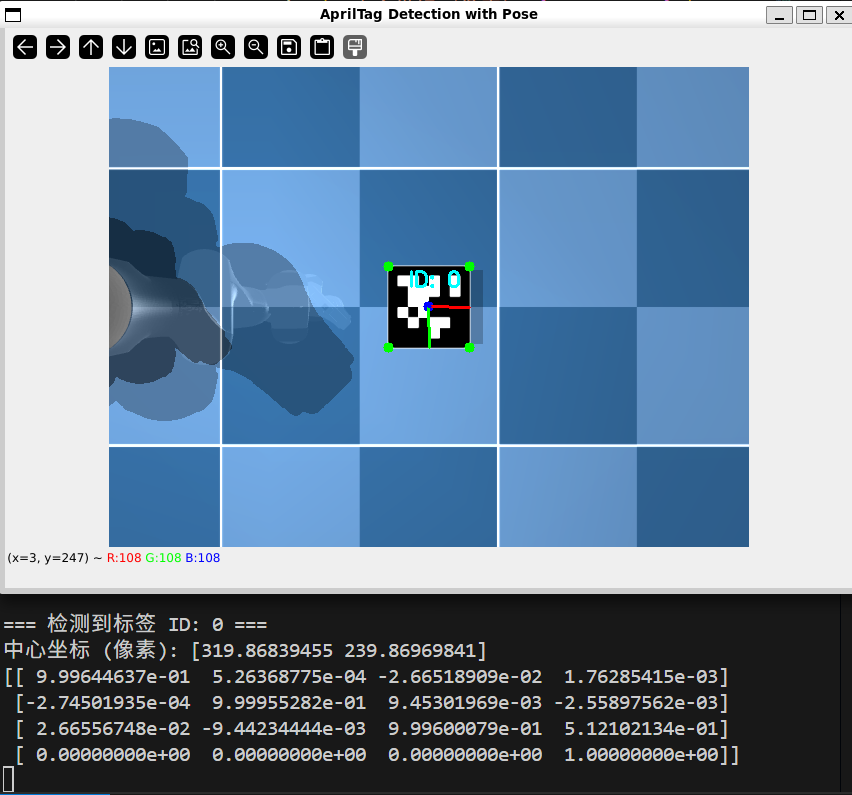
self.spnp = solvepnp.SolvePnp(TAG_SIZE, CAMERA_MATRIX, DIST_COEFFS)然后通过getFixedCameraImage就得到相机视野下的bgr图,传入给solvepnp的计算方法中,循环中已经配置了键盘的控制,可以通过移动观察计算出的位置是否基本相近
self.setMocapPosition("apriltag_0", [self.apriltag_pos_x, self.apriltag_pos_y, self.apriltag_pos_z])
image = self.getFixedCameraImage(fix_elevation=-90)
# print(self.model.cam_ipd)
if image is None:
pass
else:
_,_,_,transform = self.spnp.compute(image, 0)
self.spnp.show()
print(transform)当然pnp的方法遇到的情况和使用的具体算法有很多,代码中只用到了一种情况做了封装
# SOLVEPNP_IPPE_SQUARE 适合正方形标签,精度更高
success, rvec, tvec = cv2.solvePnP(
self.obj_points,
img_points,
self.camera_intrinsic,
self.camera_distort,
flags=cv2.SOLVEPNP_IPPE_SQUARE
)- SOLVEPNP_ITERATIVE:基于Levenberg-Marquardt(LM)迭代优化,至少 4 个有效点,重投影误差迭代
- SOLVEPNP_EPNP:支持 ≥4 个点,适合多标签 / 多特征点的场景,解算效率高
- SOLVEPNP_SQPNP:支持 ≥3 个点即可解算,无初值要求,适合标签被遮挡、仅提取到 3 个角点的场景
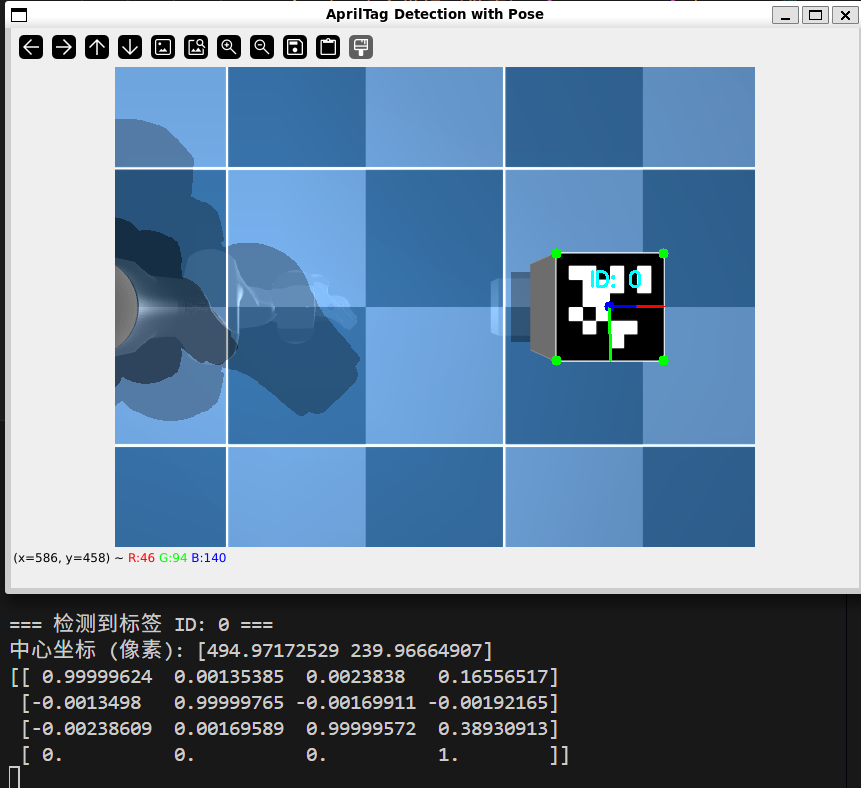
最终输出为apriltag在相机坐标系下的4*4的齐次变换矩阵
如图,apriltag位置相对于相机,x=0.00176,y=-0.00255,z=0.512,和mujoco 中配置的位置基本一致