目录
1.摘要
随着农业劳动力成本上升,多机器人系统被广泛应用于果园采摘,但在任务完成时间与能耗之间进行高效协调仍然具有挑战性,尤其是在负载影响速度变化和电池限制等现实约束下。为此,本文提出了农业多电动机器人多目标任务分配问题(AMERTA),并设计了一种混合分层路径重构算法(HRRA),包含分层编码、双阶段初始化、任务序列优化和路径重构算子等机制。
2.问题描述与模型建立
问题描述
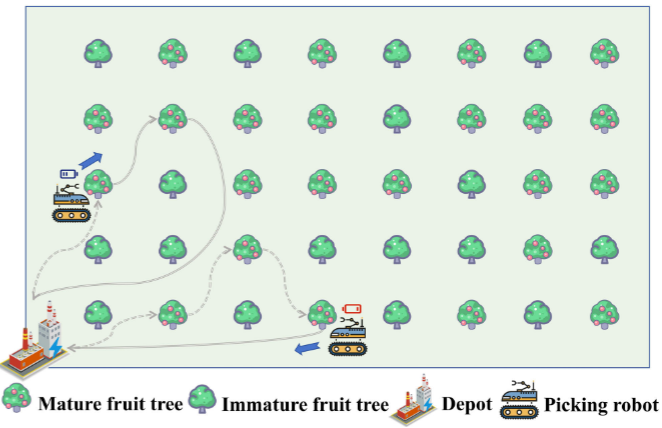
在规则种植的果园中,成熟果树被定义为任务节点,共有 n n n个节点且产量不同,节点坐标与最短行驶路径已知。初始时 r r r个相同的采摘机器人在仓库满电出发,每个节点仅由一个机器人在一次访问中完成采摘。由于容量限制,机器人需多次往返仓库,并且只有当电量低于阈值 B t h B_{th} Bth时才允许更换电池。研究目标是在这些约束条件下,同时最小化系统的最大完成时间 T m a x T_{max} Tmax和总能耗 E t o t a l E_{total} Etotal,即求解多目标优化问题 min ( T m a x , E t o t a l ) \min(T_{max},E_{total}) min(Tmax,Etotal)。
问题建模
AMERTA模型定义了节点集合 N N N、机器人集合 R R R和路径集合 S S S ,并给出了机器人载重 Q Q Q、电池容量 B B B及阈值 B t h B_{th} Bth等参数。机器人在移动和采摘过程中产生能耗与时间,其中移动能耗为
E i j = d i j ( W + L i ) g μ η × 10 − 3 , E_{ij}=\frac{d_{ij}(W+L_i)g\mu}{\eta}\times10^{-3}, Eij=ηdij(W+Li)gμ×10−3,
采摘能耗为 E i s = e q i E_i^s=eq_i Eis=eqi,行驶时间为 T i j = E i j P m a x T_{ij}=\frac{E_{ij}}{P_{max}} Tij=PmaxEij,采摘时间为 T i s = τ q i T_i^s=\tau q_i Tis=τqi,电池更换时间为 T i b = y i t s w a p T_i^b=y_it_{swap} Tib=yitswap。
最小化总能耗
E t o t a l = ∑ r ∈ R ∑ ( i , j ) ∈ S r ( E i j + E j s ) E_{total}=\sum_{r\in R}\sum_{(i,j)\in S_r}(E_{ij}+E_j^s) Etotal=r∈R∑(i,j)∈Sr∑(Eij+Ejs)
最大完成时间
T m a x = max r ∈ R ∑ ( i , j ) ∈ S r ( T i j + T j s + T j b ) T_{max}=\max_{r\in R}\sum_{(i,j)\in S_r}(T_{ij}+T_j^s+T_j^b) Tmax=r∈Rmax(i,j)∈Sr∑(Tij+Tjs+Tjb)
3.提出算法
解表示方案
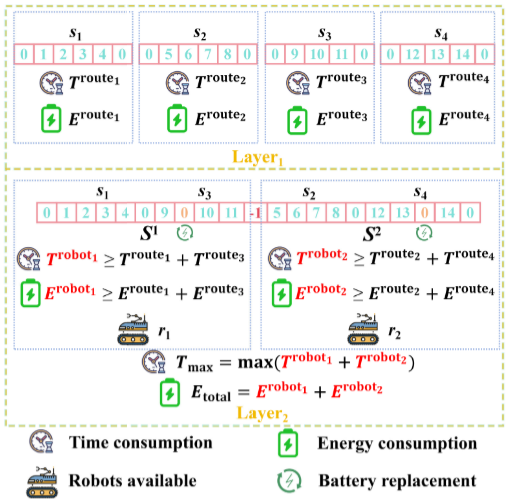
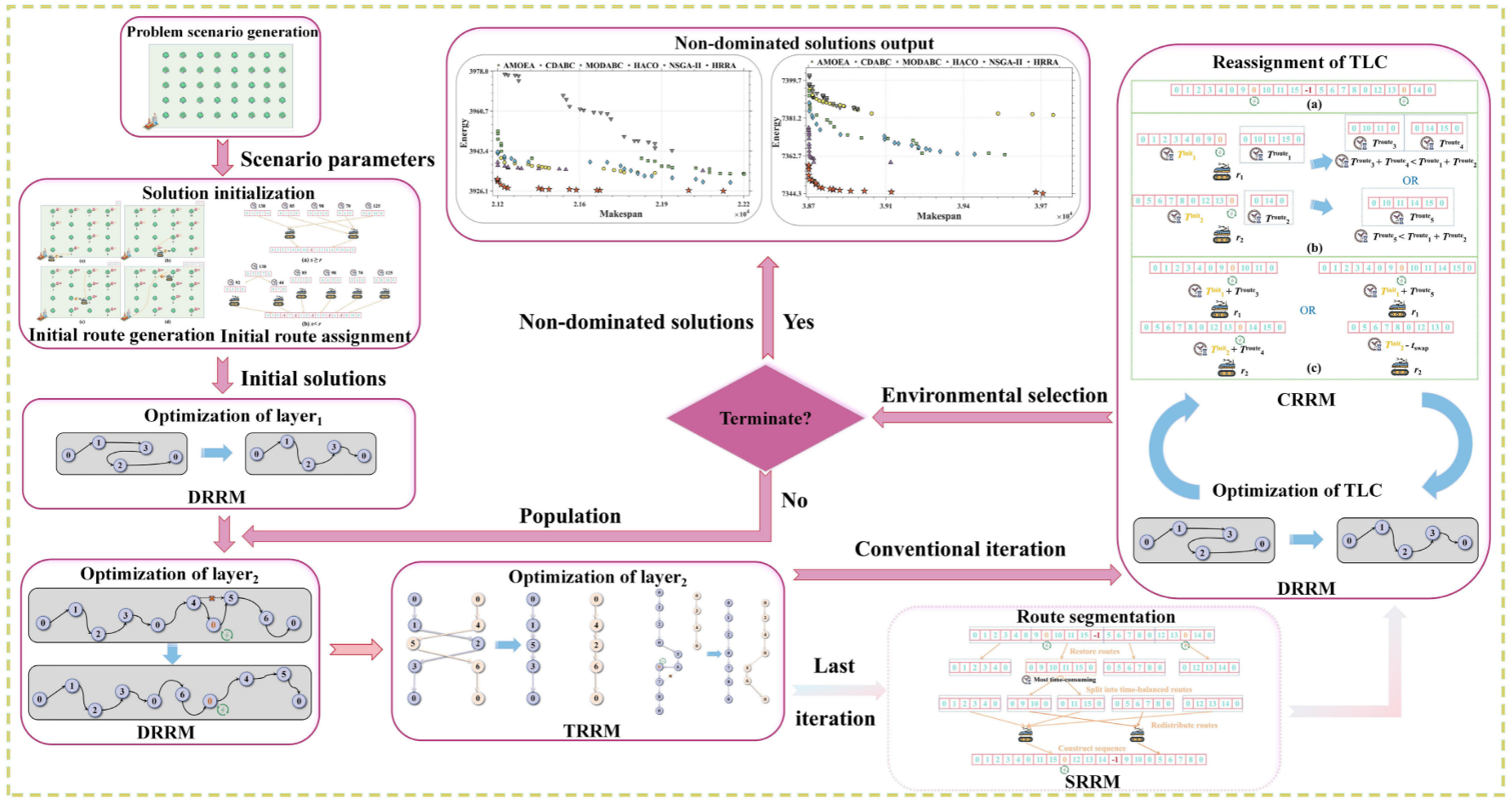
本文提出一种分层解编码结构用于同时表示多机器人任务路径构建与机器人分配,该结构由两层组成:微观路径层(Layer1)和宏观调度层(Layer2)。
Layer1将每条任务路径表示为三元组 { S i , T r o u t e i , E r o u t e i } \{S_i,T_{route_i},E_{route_i}\} {Si,Troutei,Eroutei},其中 S i S_i Si为任务序列, T r o u t e i T_route_i Troutei和 E r o u t e i E_{route_i} Eroutei分别表示该路径的执行时间和能耗。
Layer2记录全局任务序列,机器人任务映射、各机器人总能耗 E r o b o t r E_{robot_r} Erobotr与完成时间 T r o b o t r T_{robot_r} Trobotr,以及充电位置等信息。
可变载荷限制的双阶段初始化方法
为提高初始种群的质量与多样性,本文提出可变载荷限制双阶段初始化方法(VLDIM),包括路径构建和路径---机器人分配两个阶段。
在路径构建阶段采用基于距离的贪心策略生成任务路径,并通过线性递减的载荷限制控制
不同个体的载重上限:
Q p = Q ( 1 − 1 − θ p n u m ⋅ p ) Q_p=Q\left(1-\frac{1-\theta}{p_{num}}\cdot p\right) Qp=Q(1−pnum1−θ⋅p)
在路径一机器人分配阶段,当路径数 s ≥ r s\geq r s≥r时,通过混合整数线性规划最小化最大完成时间 min C m a x \min C_{max} minCmax实现路径均衡分配;当 s < r s<r s<r时,通过迭代拆分最长路径来匹配机器人数量。
任务序列优化
任务序列优化包括路径内优化和路径间优化,路径内优化通过距离重排序机制(DRRM)按任务节点与仓库距离降序调整执行顺序,使远距离任务优先完成,并结合 2- opt 局部搜索优化路径结构。
路径间优化通过任务重分配机制 (TRRM)在不同机器人之间进行任务交换或重新分配,将任务从完成时间较长的机器人转移至较短的机器人,从而优化任务分布。
基于充电的路径重构
为减弱电池容量对路径结构的影响,本文提出基于充电的路径重构机制(CRRM),该机制从每个非支配解中提取机器人最后一次充电后的任务序列(TLC),先通过DRRM优化任务顺序,再利用MILP模型在最小化最大完成时间 min C m a x \min C_{max} minCmax的目标下重新分配任务。
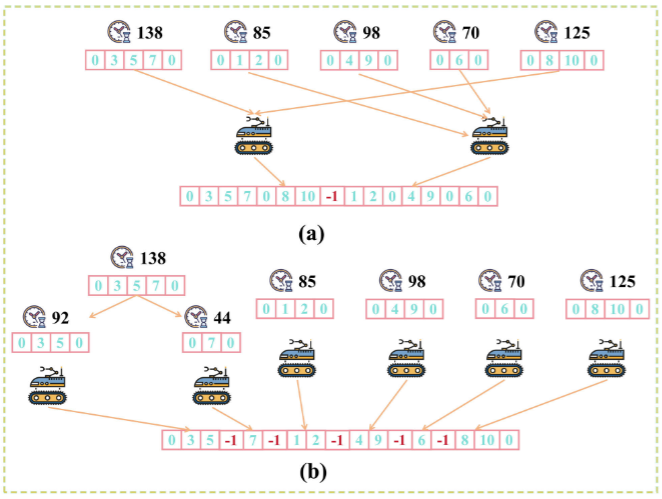
基于分割的路径重构
为提高任务时间分配的均衡性,本文提出基于分割的路径重构机制(SRRM),该机制通过识别执行时间最长的路径,将其拆分为两个执行时间近似相等的子路径,并利用 MILP1 将所有路径重新分配给机器人。
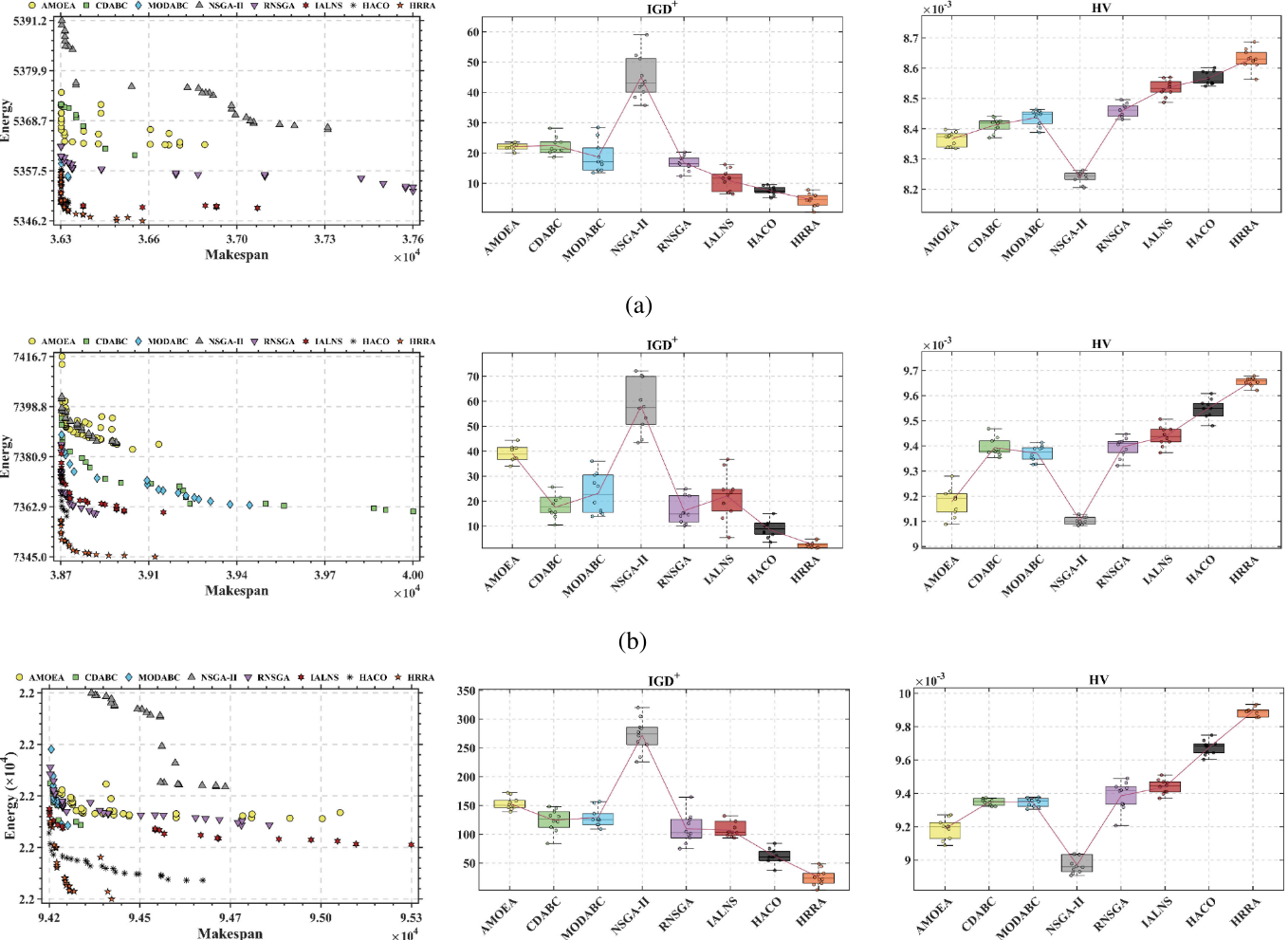
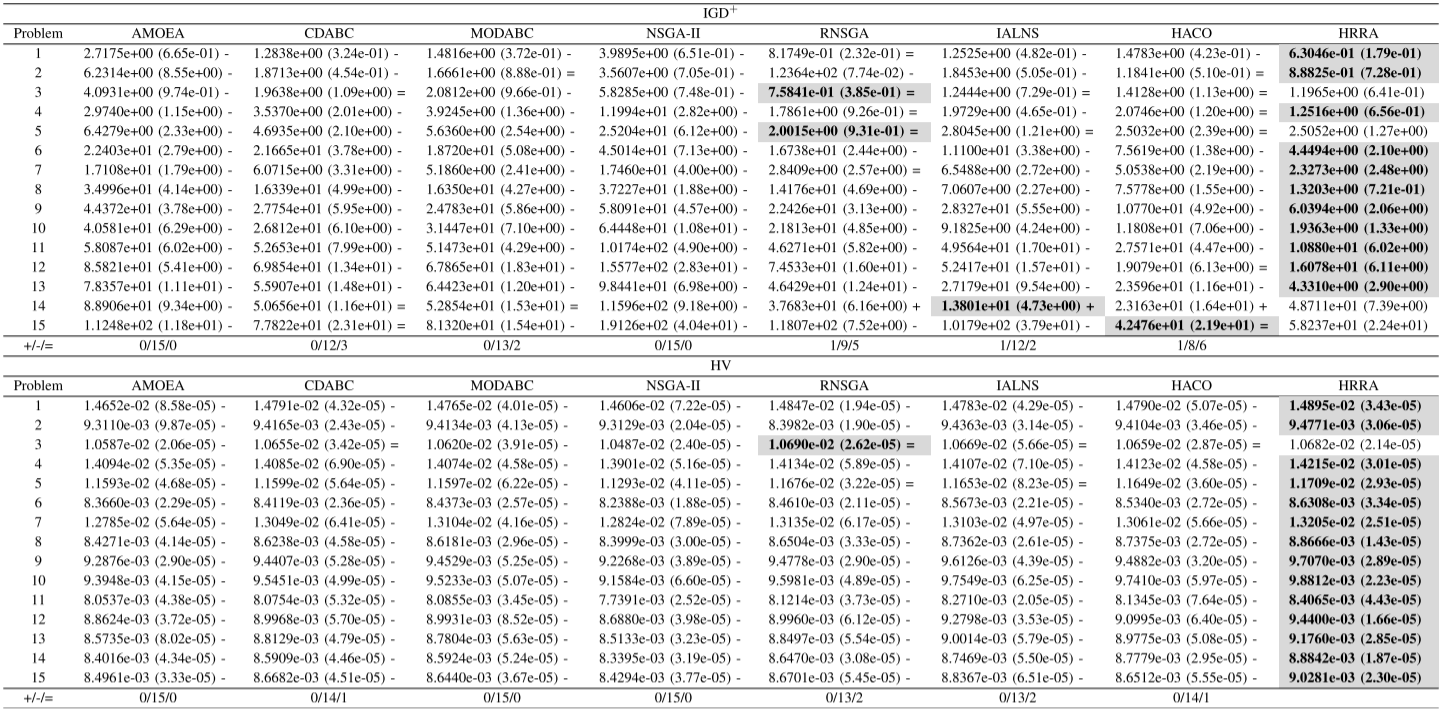
4.结果展示
5.参考文献
1 Chen P, Liang J, Song H, et al. Multi-objective task allocation for electric harvesting robots: a hierarchical route reconstruction approachJ. arXiv preprint arXiv:2509.11025, 2025.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx