Generalized ICP(GICP) 通常比 Point-to-Plane ICP 更稳定,是因为它把 点的不确定性(局部几何结构)建模为协方差矩阵,从而使误差函数更符合真实几何结构。
1. Point-to-Plane ICP 的问题
Point-to-Plane ICP 的误差:
cpp
含义:
𝑝𝑖:源点
𝑞𝑖:目标点
𝑛𝑖:目标点法向
只计算 点到平面的法向距离。
几何上:
p_i
|
| 法向误差
v
----------- 平面
q_i
优点:
比 Point-to-Point 收敛快
缺点:
只考虑目标点的法向信息
没考虑源点的几何结构
没考虑点云的噪声分布2. GICP
GICP 把每个点看成 一个小的概率分布(高斯)。
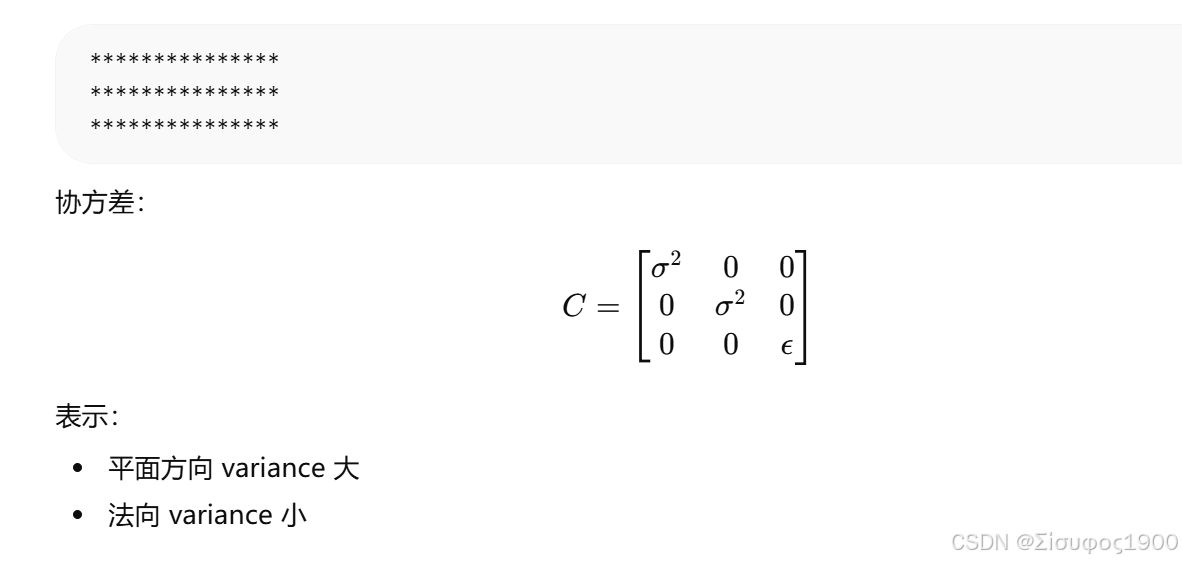
每个点都有 协方差矩阵:Ci 表示局部表面的形状。
例如:平面点
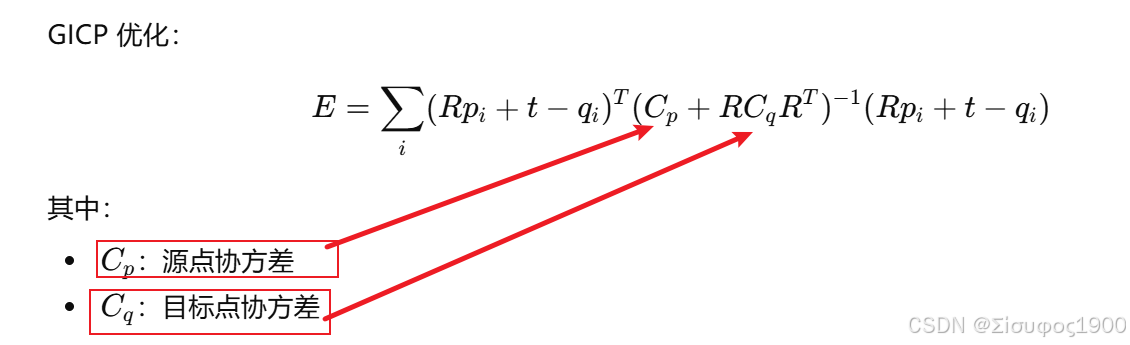
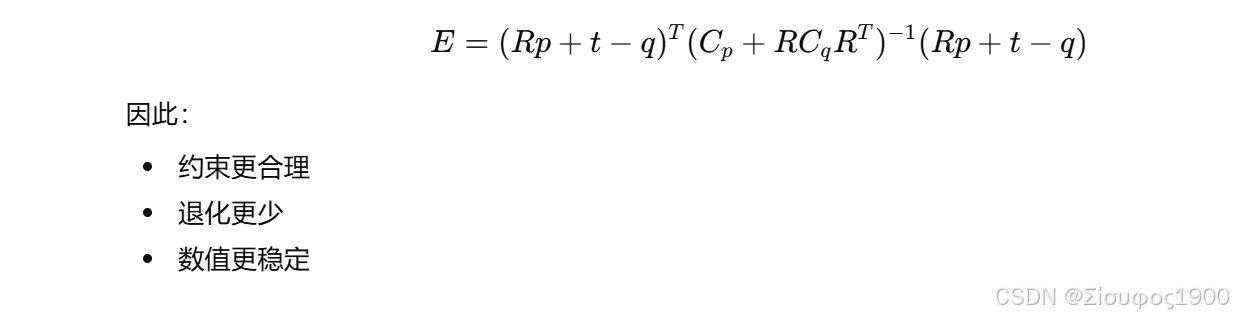
GICP 的误差函数
几何意义:
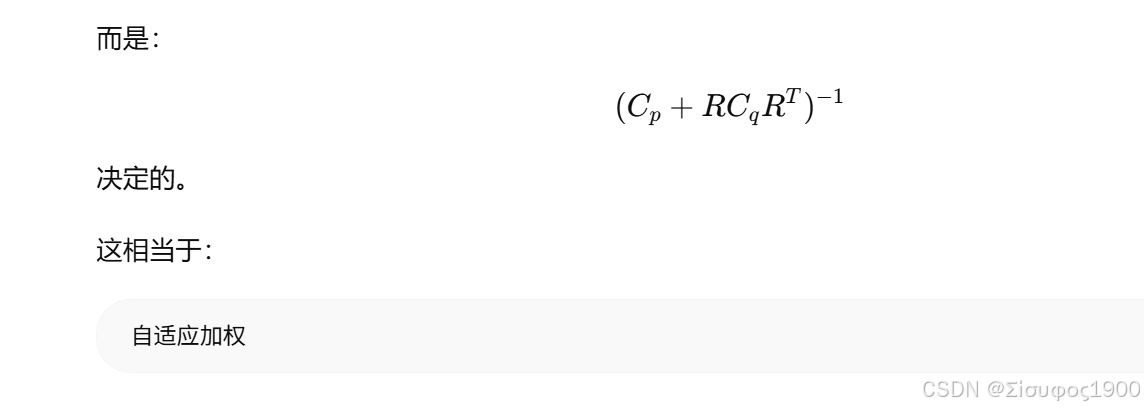
误差按照 局部表面形状加权
几何直观理解
cpp
只看:
法向误差
GICP
同时考虑:
源点表面
目标点表面
例如:
两个平面对齐:
源点云
========
目标点云
========
GICP 会理解:
沿平面方向 允许滑动
法向方向 约束更强
因此更符合真实几何。为什么更稳定
原因 1:利用双侧几何信息
cpp
Point-to-Plane:
只看目标点法向
GICP:
源点协方差
目标点协方差原因 2:误差方向自适应
误差不再是固定方向。
原因 3:更好的 Hessian 条件数
优化问题: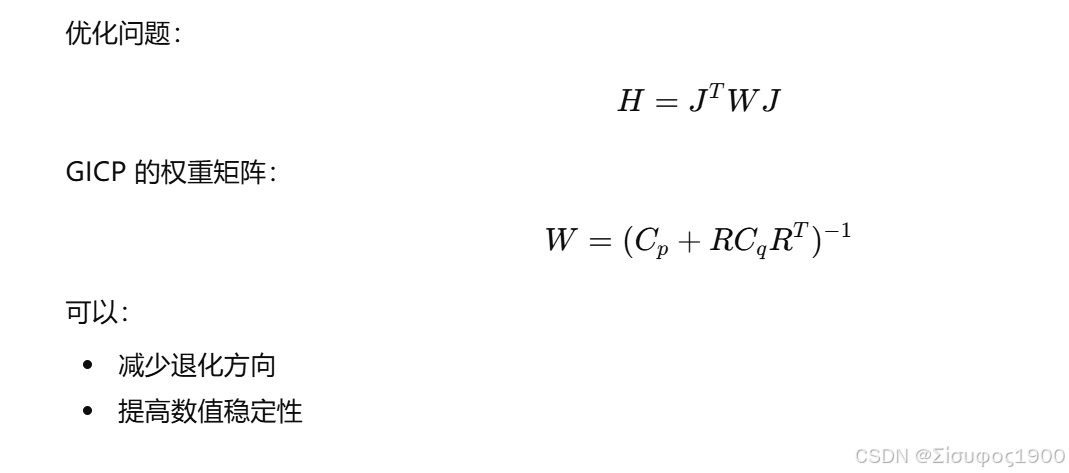
3、三种 ICP 的本质关系
| 方法 | 协方差 |
|---|---|
| Point-to-Point | (C=I) |
| Point-to-Plane | 单方向约束 |
| GICP | 完整协方差 |
| 方法 | 收敛速度 | 稳定性 |
|---|---|---|
| Point-to-Point | 慢 | 低 |
| Point-to-Plane | 快 | 中 |
| GICP | 中 | 最高 |
很多 SLAM 系统使用:
-
GICP
-
NDT
来替代普通 ICP。
4、总结
GICP 更稳定的本质原因:
它把点云局部几何建模为协方差矩阵,使误差函数更符合真实表面结构。
数学表达:
|---|---|---|
| | | |
| | | |
| | | |