原理
高斯滤波 (Gaussian Filter) 是一种基于高斯分布的平滑算法,通过对局部点云进行多项式拟合来实现平滑效果。
PCL中没有专门的高斯滤波的库,需要通过移动最小二乘法算法来实现处理。该方法的核心思想是:在计算域内的任意一点处,通过局部范围内的节点数据,构造带权重的最小二乘泛函,通过最小化该泛函来得到该点处的函数近似值,并且近似函数具有连续可导的特性。
上一篇文章介绍了移动最小二乘法的计算过程,感兴趣的朋友可以看一下->移动最小二乘法
如何用最小二乘函数进行点云过滤?
计算得到近似函数 u h ( x ) u^h(x) uh(x) 后,实际过滤过程如下:
步骤1:对每个点计算新的位置
对于点云中的每个点 x i x_i xi:
- 找到其邻域内的所有点 { x 1 , x 2 , ... , x n } \{x_1, x_2, \dots, x_n\} {x1,x2,...,xn}
- 用这些点计算该位置的近似函数 u h ( x i ) u^h(x_i) uh(xi)
- 用 u h ( x i ) u^h(x_i) uh(xi) 的值作为该点滤波后的新位置
数学表达:
滤波后的点 = u h ( x i ) = N ( x i ) u \text{滤波后的点} = u^h(x_i) = {N}(x_i) {u} 滤波后的点=uh(xi)=N(xi)u
其中:
- N ( x i ) {N}(x_i) N(xi) 是形函数在 x i x_i xi 处的值
- {u} 是原始邻域点的坐标向量
步骤2:滤波效果分析
- 平滑效果 : u h ( x ) u^h(x) uh(x) 是多项式函数,比原始离散点更平滑
- 噪声去除:高频噪声被多项式拟合"平均"掉了
- 保持形状:局部多项式拟合保持了原始表面的整体形状
步骤3:实际过滤公式
对于3D点云 ( x , y , z ) (x, y, z) (x,y,z),需要对每个坐标分量分别处理:
- x new = u x h ( x i ) x_{\text{new}} = u^h_x(x_i) xnew=uxh(xi) (x坐标的近似函数)
- y new = u y h ( x i ) y_{\text{new}} = u^h_y(x_i) ynew=uyh(xi) (y坐标的近似函数)
- z new = u z h ( x i ) z_{\text{new}} = u^h_z(x_i) znew=uzh(xi) (z坐标的近似函数)
关键:移动最小二乘法的"移动"特性
- 对每个点 x i x_i xi 都要重新计算一次近似函数 u h ( x i ) u^h(x_i) uh(xi)
- 权函数 w ( x − x I ) w(x-x_I) w(x−xI) 的中心随着当前点 x i x_i xi 移动
- 这就是"移动"最小二乘法的含义
主要特点:
- 基于局部多项式拟合实现平滑
- 有效去除高频噪声
- 保持点云的整体形状
- 需要计算法线信息
关键参数:
- 搜索半径:拟合多项式时考虑的邻域范围
- 多项式阶数:拟合多项式的阶数
- 上采样参数:控制重采样的密度
实现算法
移动最小二乘法(MLS)实现
在PCL中,MLS算法内部自动完成了以下步骤:
- 对每个点:找到搜索半径内的邻域点
- 计算权重:根据距离计算每个邻域点的权重
- 拟合多项式:用加权最小二乘法拟合局部多项式曲面
- 投影到曲面:将原始点投影到拟合的曲面上,得到平滑后的点
cpp
// MLS平滑(核心过滤过程)
pcl::MovingLeastSquares<pcl::PointXYZ, pcl::PointNormal> mls;
mls.setInputCloud(cloud);
mls.setPolynomialOrder(2); // 使用二次多项式拟合局部曲面
mls.setSearchMethod(tree);
mls.setSearchRadius(0.03); // 搜索半径,决定平滑程度
mls.process(*mls_points);参数说明
cpp
// 多项式阶数:控制拟合精度
mls.setPolynomialOrder(2); // 二次多项式拟合
// 搜索半径:控制平滑程度
mls.setSearchRadius(0.03); // 搜索半径3cm
// 上采样设置:在平滑后的曲面上生成新点,增加点云密度
// 注意:启用上采样会增加输出点数
mls.setUpsamplingMethod(pcl::MovingLeastSquares<pcl::PointXYZ, pcl::PointNormal>::SAMPLE_LOCAL_PLANE);
mls.setUpsamplingRadius(0.005); // 上采样搜索半径
mls.setUpsamplingStepSize(0.003); // 上采样步长完整代码
cpp
#include <iostream>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <pcl/surface/mls.h>
#include <pcl/features/normal_3d.h>
#include <pcl/visualization/pcl_visualizer.h>
int main() {
// 1. 加载点云数据
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>("02.pcd", *cloud) == -1) {
std::cerr << "错误:无法加载点云文件02.pcd" << std::endl;
return -1;
}
std::cout << "加载点云成功,文件名: 02.pcd" << std::endl;
// 2. 创建KD树用于搜索
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());
// 3. 执行MLS平滑(高斯滤波的核心实现)
pcl::PointCloud<pcl::PointNormal>::Ptr mls_points(new pcl::PointCloud<pcl::PointNormal>);
pcl::MovingLeastSquares<pcl::PointXYZ, pcl::PointNormal> mls;
mls.setInputCloud(cloud); // 设置输入点云
mls.setPolynomialOrder(2); // 二次多项式拟合,平衡精度和速度
mls.setSearchMethod(tree); // 使用KD树加速邻域搜索
mls.setSearchRadius(0.03); // 搜索半径3cm,控制平滑程度
// 上采样设置:在平滑后的曲面上生成新点,增加点云密度
// 注意:启用上采样会增加输出点数
// mls.setUpsamplingMethod(pcl::MovingLeastSquares<pcl::PointXYZ, pcl::PointNormal>::SAMPLE_LOCAL_PLANE);
// mls.setUpsamplingRadius(0.005); // 上采样搜索半径
// mls.setUpsamplingStepSize(0.003); // 上采样步长
mls.process(*mls_points); // 执行MLS处理,得到平滑后的点云(含法线信息)
// 4. 转换回PointXYZ类型(去除法线信息,便于可视化)
pcl::PointCloud<pcl::PointXYZ>::Ptr filtered(new pcl::PointCloud<pcl::PointXYZ>);
filtered->points.resize(mls_points->size());
for (size_t i = 0; i < mls_points->size(); ++i) {
filtered->points[i].x = mls_points->points[i].x;
filtered->points[i].y = mls_points->points[i].y;
filtered->points[i].z = mls_points->points[i].z;
}
filtered->width = filtered->points.size();
filtered->height = 1;
// 输出处理结果,对比点数变化
std::cout << "原始点云点数: " << cloud->points.size() << std::endl;
std::cout << "高斯滤波(MLS)后点数: " << filtered->points.size() << std::endl;
std::cout << "参数: 多项式阶数=2, 搜索半径=0.03m" << std::endl;
// 5. 可视化对比原始点云和滤波结果
pcl::visualization::PCLVisualizer viewer("MLS高斯滤波效果对比");
// 原始点云:红色,半透明,小点
viewer.addPointCloud<pcl::PointXYZ>(cloud, "original");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1.0, 0.0, 0.0, "original");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "original");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_OPACITY, 0.3, "original");
// 滤波后点云:白色,不透明,大点
viewer.addPointCloud<pcl::PointXYZ>(filtered, "filtered");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1.0, 1.0, 1.0, "filtered");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "filtered");
// 添加图例说明
viewer.addText("红色半透明: 原始点云 (有噪声)", 10, 70, 12, 1.0, 1.0, 1.0, "original_text");
viewer.addText("白色大点: MLS滤波后 (平滑)", 10, 50, 12, 1.0, 1.0, 1.0, "filtered_text");
// 6. 运行可视化窗口
std::cout << "打开可视化窗口,按q退出..." << std::endl;
while (!viewer.wasStopped()) {
viewer.spinOnce(100); // 每100ms更新一次
}
// 7. 保存滤波结果
pcl::io::savePCDFileASCII("filtered.pcd", *filtered);
std::cout << "滤波结果已保存到: filtered.pcd" << std::endl;
return 0;
}运行结果
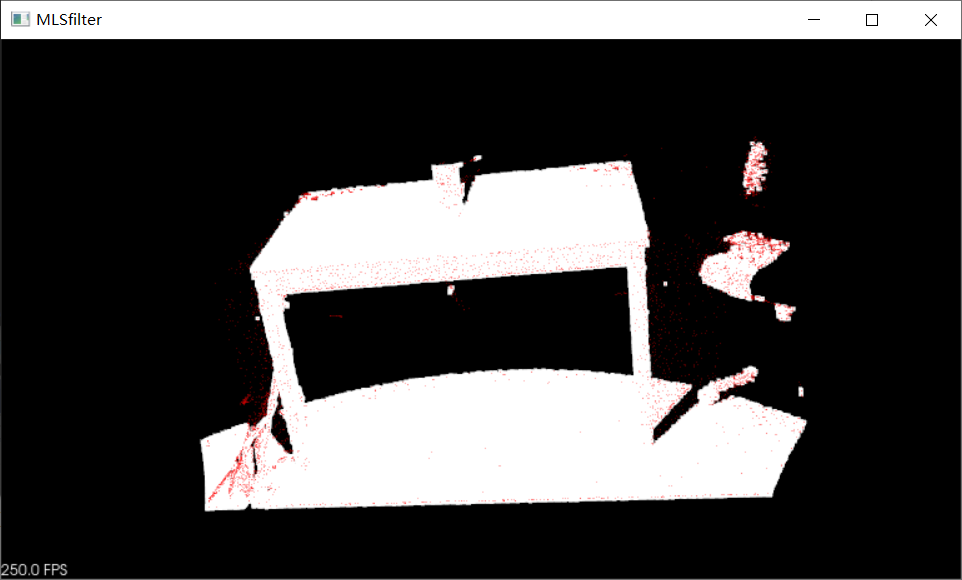
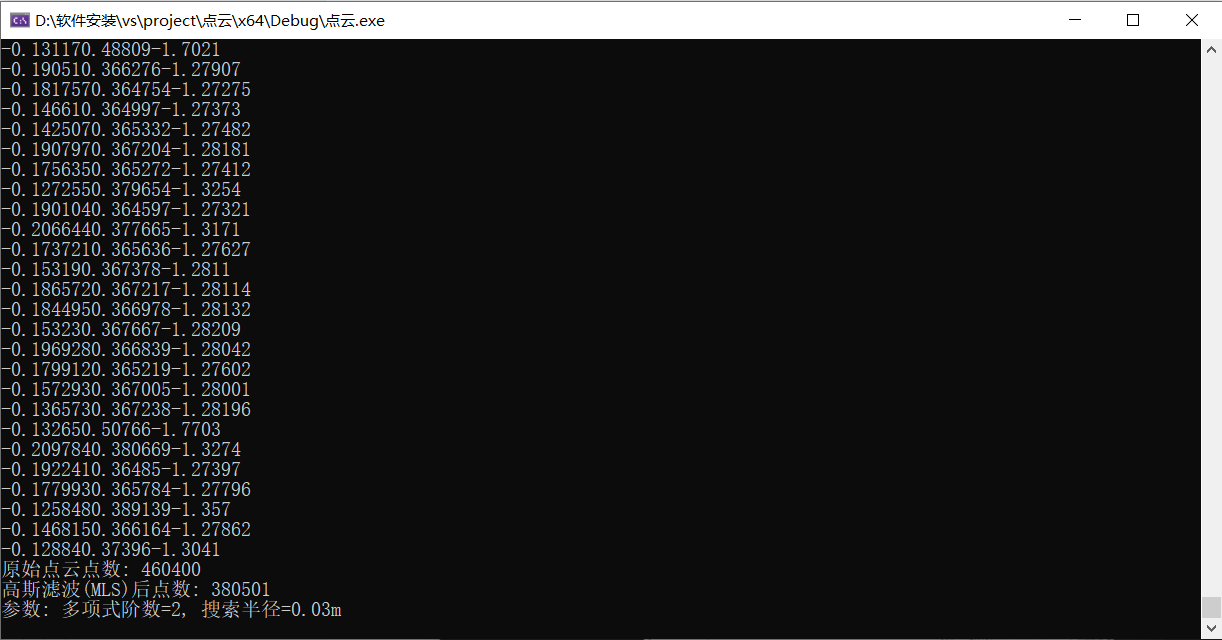
点有点多,用这种方法来过滤需要较长时间。