《智能的理论》全书转至目录****
不同AGI的研究路线对比简化版:《AGI(具身智能)路线对比》,欢迎各位参与讨论、批评或建议。
一.机器感受器(Abraira和Ginty,2013)
皮肤是身体内部器官的第一道屏障。由外到内,它由三层组成:表皮层、真皮层和皮下组织。触觉感受器处于皮肤之中,称为机械感受器,它们能够为人体提供丰富的触觉信息,如感知物体的纹理、形状、大小和硬度等信息。皮下触觉感受器主要包括:迈斯纳小体、默克尔细胞、帕西尼小体和鲁菲尼小体等。
1.迈斯纳小体
迈斯纳小体是一种位于皮肤真皮层的触觉感受器,其主要特点包括:
(a)感受野,感受野较小,通常只有几毫米,分辨率较高,因此能够敏锐地定位微小的变化或刺激的精确边缘;
(b)敏感程度,是一种高度敏感、快速响应的触觉感受器,主要负责对皮肤表面的轻微触碰和振动的感受;
(c)适应性,根据触觉感受器对刺激的适应速度,可将它们区分为慢适应和快适应两种类型。快适应受体只有在触觉刺激变化时才会产生反应(触觉刺激不变时不会产生反应),它们有助于形成颤振和滑动感,如图1。如迈斯纳为快适应受体。
(d)频率范围,主要对低频刺激较为敏感,其响应频率范围主要在20-50Hz之间,振动峰值为40 Hz左右;
(e)分布范围与数量,通常分布在手指、脚趾、嘴唇等部位,数量最多的区域是手指和脚趾;
(f)作用,感知(低频)纹理变化;感知低频震动,如敲、拍、打等响应;感知在皮肤上的移动以及控制手部抓握(接触物体和离开物体时有反应,能感知物体一些细节)。
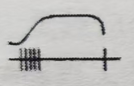
图1
2.默克尔细胞
默克尔细胞位于表皮和真皮的交界处,其主要特点包括:
(a)感受野,感受野较小,分辨率较高,因此能够敏锐地定位微小变化或刺激的精确边缘;
(b)敏感程度,可以感知轻微形变,如轻触和振动等;
(c)适应性,默克尔细胞是慢适应受体,慢适应是指当诱发刺激持续呈现时,该感受器也能持续反应,它们能使人们产生形状和粗糙感,如图2;
(d)分布范围与数量,在皮肤中的数量相对较少,其密度约为每平方毫米25个,主要分布在皮肤的指尖、掌心、足底等区域;
(e)作用,对连续接触反应,知觉纹理和细节(如刺激物体的弯角、边缘和弯曲率),知觉形状。
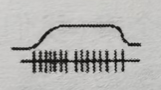
图2
3.帕西尼氏小体
帕西尼小体也称为环层小体,位于真皮深处,其主要特点包括:
(a)感受野,感受野较大,分辨率较低,对振动刺激的空间位置的辨别准确度较低;
(b)敏感程度,对于压力的感受门槛非常低,能够感受到微弱的压力刺激;
(c)适应性,帕西尼小体是快适应受体,它只有在刺激出现或者刺激移开时才会放电,如图3;
(d)频率范围,对高频振动较为敏感,能够感受到80~300 Hz的振动;
(e)分布范围与数量,主要在手指、脚趾和肢体等处,在手指和脚趾中的数目最多,每平方厘米可达到数百个;
(f)作用,感知皮肤上的高频震动,通过手指在物体表面上的滑动感知(高频)精细纹理。
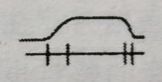
图3
4.鲁菲尼小体
该小体主要分布在皮肤真皮层深处和皮下组织中,其主要特点包括:
(a)感受野,感受野较大,分辨率较低,对刺激的空间位置的辨别准确度较低;
(b)敏感程度,与其他触觉感受小体相比,该机器感受器具有较高的阈值,因此相对不容易被触发;
(c)适应性,鲁菲尼小体为慢适应受体,如图4;
(d)作用,对于持续的压力和皮肤的拉伸(如抓挠)有较高的敏感度。
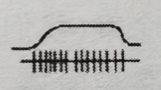
图4
5.毛发感受器
该感受器感知毛发的位置变化,为快适应受体,感受野较小,作用是感知抚摸。
6.复合触觉
每个触觉感受都有不同的特征和特定的作用,包括压力、振动和形变等。这些感受器组合起来类似于光学中的颜色三原色,通过不同的触觉元素组合可以产生出各种各样的触觉感觉,如在同一个触觉点受到各种程度的压力、振动和形变,因此这三种触觉感受称为触觉三原色,如图5。
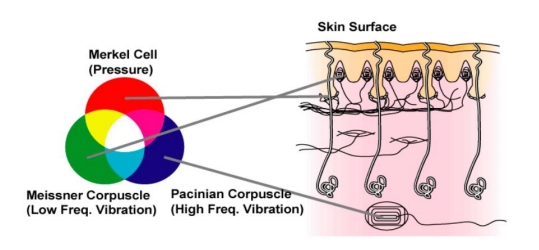
图5
另外,特定触觉会要求整合不同类型的身体感觉感受器信息(如机械感受器与温度感受器)。例如,皮肤上"湿湿的"感觉就要求激活机械感受器与冷温度感受器。如果无法对此两类感受器做出反应,就无法产生"湿湿的"感觉。同样地,湿湿的刺激物如果仅能激活一类感受器,则它无法被感知为湿湿的。例如,与皮肤温度接近的水不会被感知为湿湿的(因为冷温度感受器未被激活),如果将手放入冷水中也不会产生湿湿的感觉(因为未激活机械感受器)。当你用手抓住一条滑滑的鱼时,可能会产生一种油油的感觉,它也是对不同类型感受器信息进行混合加工后的结果。(Gallace和Spence(著),涂阳军(译),2018)
7.触觉敏锐度和触觉阈(Goldstein和Brockmole(著),张明(译),2018)
触觉敏锐度即感知皮肤上细节的能力。测量触觉敏锐度的传统方法是测两点辨别阈。能被很小纤毛引起反应的皮肤叫触点,相邻两个触点的最小距离称为两点辨别阈,它代表触觉感受器的密集程度。当两点辨别阈和其感受野越小,触压觉的分辨率越高,反之亦然。
能引起触压觉的最小压陷深度被称为触觉阈,触觉阈与触压感受器在皮肤上的密度和感受野大小有关,密度越高,感受野越小,则触觉阈越低;相反,密度越低,感受野越大,则触觉阈越高。舌头和指尖的触觉阈很低,手腕和足处的较高。触压觉对复杂精细的运动有重要作用,比如系纽扣和书写。
注:两点辨别阈的测量方法
测量两点阈的方法是轻轻接触皮肤上的两个点(如用制图圆规的点),然后让被试报告他感觉到的是一个点还是两个点(图6(a))。两点阈是大部分早期触觉研究中测量敏度的主要方法(图(b))。后来又引入了一些其他方法。比如将栅格往皮肤上按压,然后让被试指出栅格的朝向,根据栅格之间最窄的间隔测量得出触觉敏锐度。
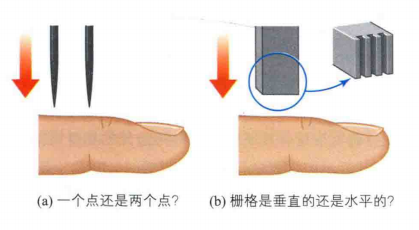
图6
二.神经通路和皮质
1.神经通路(Goldstein和Brockmole(著),张明(译),2018)
全身的信号都从皮肤传导到脊髓,在信号达到脊髓后,通过两条主要的路径将其传递到大脑:内侧丘系通路和脊髓丘脑通路。丘系通路由粗大纤维组成,这些粗大纤维携带着与感知四肢位置(本体感觉)和感知触觉相关的信息,并且高速传递信号。这对于控制动作和对触觉做出反应是非常重要的;脊髓丘脑通路由较细小的纤维组成,这些纤维传递与温度和疼痛有关的信号。当人失去了感知触觉和感知四肢位置(丘系通路)的能力时,仍然能够感知疼痛和温度(丘脑通路),反之亦然,这体现了功能的分离。两个纤维通路在向上传导到丘脑的过程中会交叉传导到大脑的另一侧。这些纤维突触中的大多数都在丘脑的腹外侧核中,但还有一些突触在其他丘脑核中。由于脊髓中的信号交叉传到身体的另一侧,所以来自身体左侧的信号传导到大脑右半球,而身体右侧的信号传导到左半球。如图7所示。
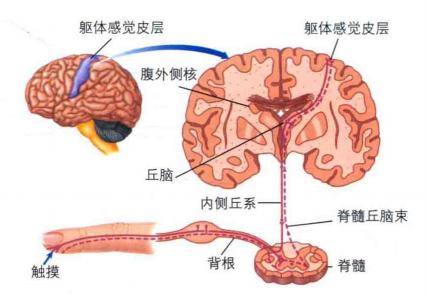
图7
不同的通路有不同的到达时间,当同一时间在不同位置出现多个触觉刺激时,由于不同刺激的到达时间不同,因此可能会产生触觉错觉。如摩擦两个中指指尖产生触觉就好像产生自两个手指中间一样;如果你用指尖摩擦嘴唇,你只会感受到来自嘴唇的触觉(而非你的指尖);用你的食指去触摸大腿,此时你只会感觉到来自手指的触觉(而非大腿)。上述效应源于身体不同部位触觉信号到达大脑的时间的差异。然而,上述效应也可能受到身体不同部位具有不同敏感性的影响。
2.触觉皮质(Goldstein和Brockmole(著),张明(译),2018)
(1)S1区和S2区
信号从丘脑传导至位于顶叶皮层的躯体感觉接收区(S1),也可能到达次级躯体感觉皮层(S2)(Rowe,Turman,Murray和Zhang,1996;Turman,Morley和Rowe,1998),信号也会在S1与S2之间传导或者从S1和S2传导到其他的躯体感觉区。
神经外科医生Penfeld(Penfeld和Rasmussen,1950)发现躯体感觉皮层S1的不同部分与身体上的位置相对应(如某部分皮质对应手、某部分皮质对应脸部),因此他提出身体地图。身体地图显示,皮肤上相邻的区域投射(对应)到大脑上相邻的皮质。另外,肢体的表面积大小与其S1对应皮质区域的大小并不一致。例如,大拇指对应的皮层面积与整个前臂对应的面积一样大。一般来说,如果肢体的触觉任务需求越多(如手指和嘴唇),需要经常通过触觉来察觉事物细节,所占皮质的面积越大。另外,在此处的触觉神经元感受野较小,触觉敏锐度更高;如果肢体的触觉任务需求越少(如背部),所占的皮质面积越小。另外,在此处的触觉神经元感受野较大,触觉敏锐度更低。因此,身体地图又被被称为侏儒,如图18。有观察表明,人类在同一时间内能够意识到的触觉刺激数量与表征所在触觉皮质面积的比例有关,即肢体对应的触觉皮质面积越大,能在同一时刻感知到的触觉数量越多;反之亦然。
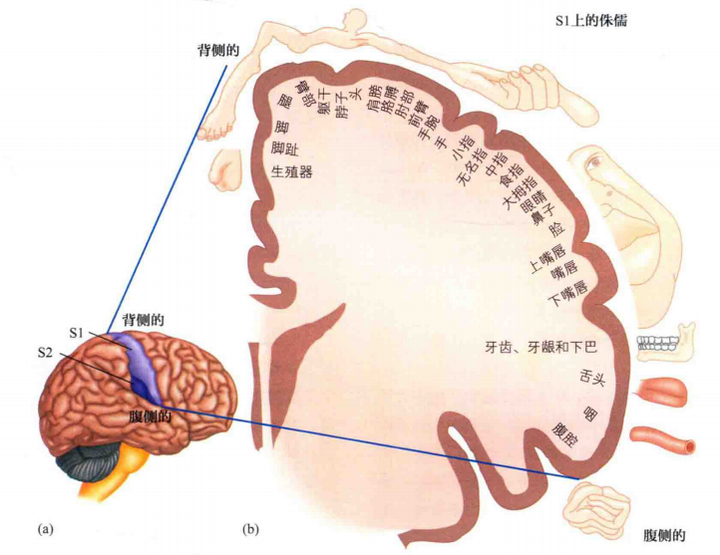
图8
(2)可塑性
皮层结构的一个基本原则是特定功能的皮层表征区域可以随着该功能使用频率的增加而变大。如视觉系统中,在垂直环境中饲养小猫将会导致其视觉皮层大部分神经元对垂直朝向线条的反应更大(9-1:视觉通路)。触觉系统中同样有这样的发现,在William Jenkins和Michael Merzenich(1987)的实验中,测量了猴子每个手指对应的皮层区域,然后训练猴子使用某个指尖完成特定的任务。当他们比较训练前和训练3个月后猴子手指尖对应的皮层地图时,发现训练后表征手指尖的皮层面积显著增加。
(3)特异化
与视觉神经元一样,同样存在一些具有功能特异化的触觉神经元。例如,在皮层中发现了一些有中心-周边感受野属性的神经元;一些神经元对特殊朝向进行反应;一些神经元对在皮肤上特殊方向的运动进行反应。
(4)"什么"与"哪里":触觉表征的双通路系统(Gallace和Spence(著),涂阳军(译),2018)
与视觉"什么"与"哪里"的双通路系统一样,触觉同样存在双通路系统。在一项测试中,被试听两个线索词并判断它们是否与同一目标物或不同目标物相关联。实验中测量了被试在任务中的血氧水平。研究结果发现,目标物触觉编码信息的提取激活了S2区、脑岛及顶叶皮层,而触觉编码空间位置信息的提取激活了S1区和顶叶皮层(并未激活脑岛)。
三.触觉组织(Gallace和Spence(著),涂阳军(译),2018)
格式塔心理学家在对视觉的研究发现,视觉的知觉组织中存在许多不同的分组原理,如空间接近性、相似性、良好连续性、共同命运等等(9-13:视知觉组织)。随后,研究者发现许多格式塔分组原理也同样适用于触觉。
1.触觉完形
想象一下,当你闭上眼睛并手握一个瓶子的情景,在拿瓶子时尽管手指是分散开的(手指与手指之间有缝隙),但从感受上你不会感觉到手指间的缝隙呢。对于此,其原因之一就是刺激的神经表征填补了刺激之间的间隙。而这种手握物体间的空隙的填补似乎是自动的。
在一项实验中,在振动目标刺激(200 Hz正弦信号)中插入短暂间隙后,再用振动刺激噪音(其频率中心为200 Hz,范围为50~80 Hz)在间隙间进行填补,如图9。尽管刺激是不连续的,被试仍觉得该振动刺激目标是连续的(即刺激面的震动频率是均匀一致的)。该结果清晰地表明,在刺激呈现的特定条件下,人们会自动填充触觉刺激间的间隙。
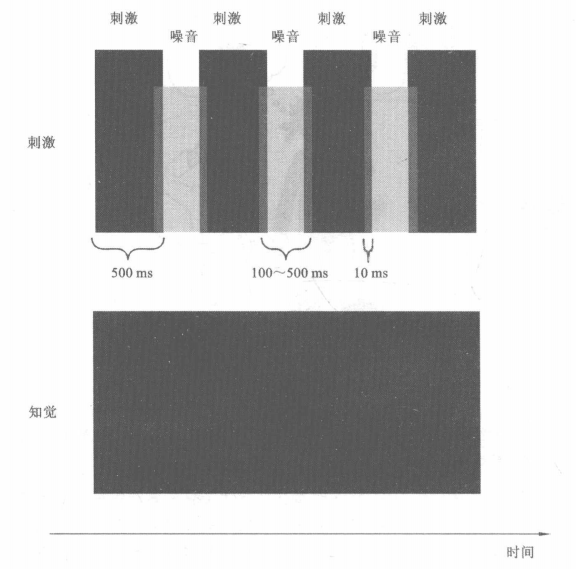
图9
2.接近性和相似性
一项研究调查了接近与相似性格式塔原理是否像视觉一样同样能够应用于触觉。研究中使用了若干个不同的物体,这些物体在表面材质或空间距离上存在差异,需要被试在进行触觉探索后,对这些元素进行分组。研究结果发现,当物体间的空间间距大小在大致相等的情况下,许多被试使用物体材质(即相似性)进行分组,但在空间间距不一致时,空间接近性决定了分组结果。该研究支持了视觉分组中的相似性与接近性原则同样也适用于触觉分组。
3.似动
"似动"是指一种虚幻的运动,除了视觉,在触觉中同样存在。Carter等人(Carter,Konkle,Wang和Hayward等人,2008)使用似动四重奏范式,该范式由四个刺激组成的展示物施加在被试的手指上,具体的说先呈现200ms对角刺激,然后关闭刺激300ms,再呈现200ms另一对角刺激,循环往复,如图10。在这种设置下,会呈现两种可能的似动现象,即两个刺激交替地上下运动,或两个刺激交替地左右运动,这两种似动运动是相冲突的。实验结果验证了触觉的似动想法,当刺激呈现时,被试报告感知到沿手指上下方向或左右方向的运动会相互转换。
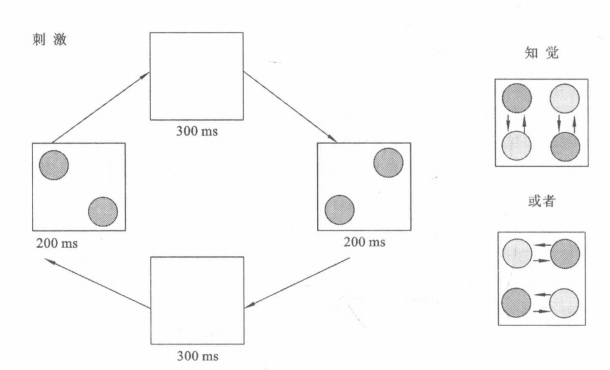
图10
要注意的是,似动现象离不开知觉分组,似动中刺激元素必须存在接近性或相似性,触觉通道的似动才能被诱发出来。
4.图形与背景
根据格式塔法则,为了加速触觉知觉,图形刺激需要很快地将与其背景分离开来。Heller等人(Heller,Wilson,Steffen和Yoneyama等人,2003)探讨了人们是否能从背景中区分出触觉图形的能力,如图11。被试分为被蒙眼正常视力组、先天盲人组、后天盲人组。在实验过程中,被试首先需要通过触觉探索目标图像(通过凸显线条),然后这个目标图形会出现在四个不同背景中一个,被试需要接着触觉扫描这四个图形,并选择出包含目标刺激的那个。研究结果表明,先天性盲人被试与被蒙眼被试在精确性上具有同样的表现,但就速度而言,先天性盲人被试比被蒙眼被试的反应速度更快。该结果表明盲人被试与视觉未受损被试均能有效将触觉图形从其背景中识别出来。
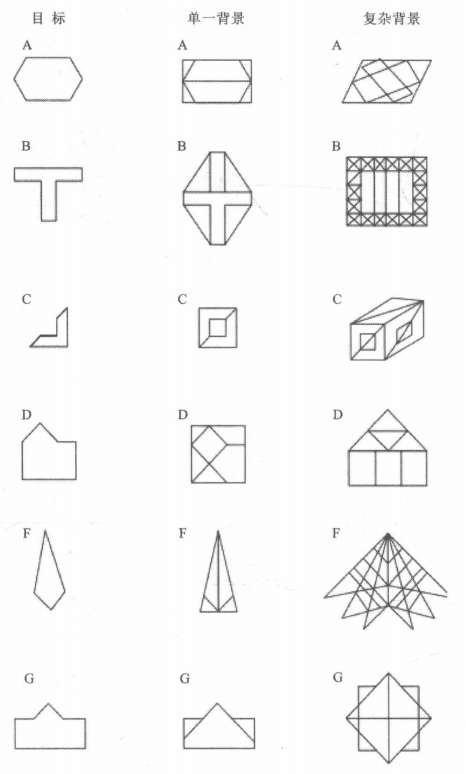
图11
5.跨通道分组
研究比较多的是单通道的知觉分组。那不同通道的刺激能否根据格式塔原则形成分组(如两个视觉刺激和一个触觉刺激能否整合为一个分组),或者每个通道彼此独立?Lyons等人(Lyons,Sanabria,Vatakis和Spence,2006)对此展开了研究,实验设置如图12(a)所示,有6个LED等和两个振动触觉产生器(振动触觉产生器位于中间两个LED灯的位置处)。在每个试次中,有6个或者2个灯依次亮起形成视觉流(从左到右或从右到左),两个振动触觉产生器同样依次形成振动运动流,视觉运动流的方向和振动运动流的方向无关(独立),当它们的方向一致时称为一致条件,方向不一致则称为不一致条件。实验要求被试忽略视觉流,并指出振动运动流的方向。实验结果如图(b)所示,相比六个LED灯,两个LED灯条件下对被试的成绩影响更大(相比6个灯的条件,在不一致条件下,两个灯的情况下成绩更好;在一致条件下,两个灯的情况下成绩更差),说明视觉通道内的知觉分组影响视觉与触觉似动信息的跨通道整合。
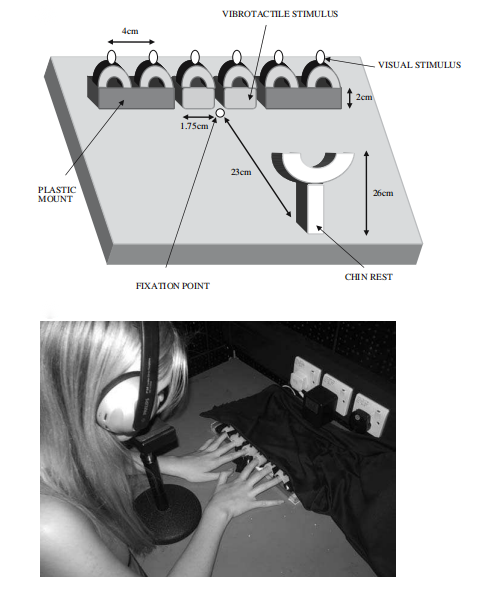
图12(a)
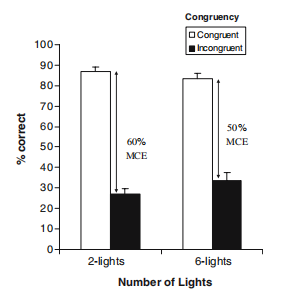
图12(b)
四.触觉识别
1.触觉特征
触觉特征包括刺激物的(a)微观几何特征,如物体表面材质、纹理、粗糙程度和空间密度等。这些特征通过与很小一块皮肤区域接触就能感知(落入机械感受器的感受野);(b)宏观特征,如物体的长度、大小、结构和形状等,这些特性需要机械感受器与动觉/本体感觉(提供了有关四肢与关节位置的信息)的整合;(c)空间特征,如刺激物的位置和朝向,这些特性需要机械感受器与动觉/本体感觉更高层级的整合。(Gallace和Spence(著),涂阳军(译),2018)
2.凸点(边)感知
默克尔感受器的反应强度与物体表面的曲度有关,如图13所示,当指尖分别与两个不同的球体接触时,相比大球(曲度较小),触摸小球(曲度较大)产生的反应更强。另外,在接触点的感受器的反应最强,离接触点越远,感受器反应越小。(Goldstein和Brockmole(著),张明(译),2018)
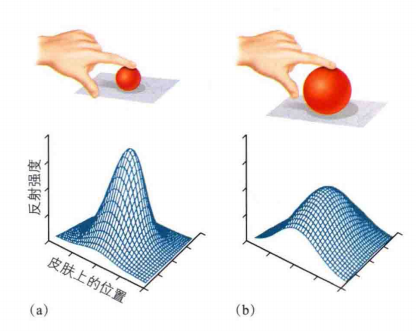
图13
3.纹理感知(Goldstein和Brockmole(著),张明(译),2018)
物体的表面纹理是由凸起和凹陷构成的表面的物理纹理。视觉纹理识别依赖于照明和距离情况,如图14所示,尽管图(a)和图(b)中柱子的两个纹理看起来非常不同,但是用手指在两个表面划过时就会发现它们的纹理是一样的。因此视觉可能并不是物体表面纹理识别的好方法。触觉直接接触物体的表面,因此它提供了比视觉更准确的对表面纹理的评价。Katz(1989)引入了纹理感知的双重理论,该理论认为对纹理的知觉依赖于空间线索和时间线索(Hollins和Risner,2000;Katz,1989)。较明显的表面元素可以提供空间线索,如凸起和凹槽,它们可以在皮肤触碰表面和按压表面时被感觉到。这些线索导致人们能对表面不同的形状、大小和分布进行感知。当肢体在接触表面运动时,在滑动过程中所感受到的震动可以提供时间线索(由于物体表面凹凸不平,因此在皮肤划过时会使机械感受器感到震动),如皮肤滑过砂纸的纹理表面时为我们提供的信息。Hollins和Risner(2000)通过让被试保持手指触摸但不移动,然后让被试判断粗糙程度,这时被试几乎感觉不到两种不同精细纹理的细微区别(10微米和100微米的微粒尺寸)。然而,要求被试移动手指时,他们可以感觉到精细纹理的区别。因此研究者认为只有当移动产生的皮肤表面的振动时,才可以感觉精细表面的粗糙度。
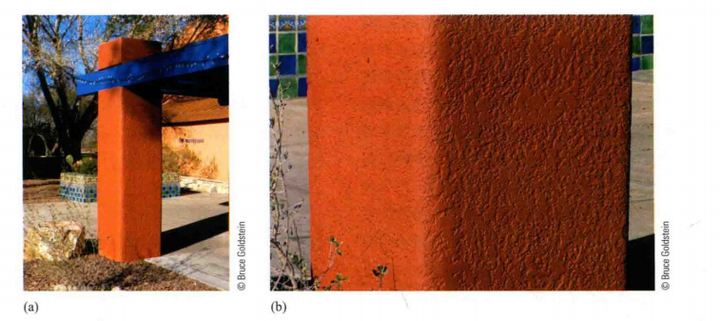
图14
(1)粗糙纹理
一般来说,空间线索识别粗糙纹理,如盲文点或者当触碰梳子的梳齿时所感觉到的纹理。皮肤粗糙纹理感知的一个令人印象深刻的例子是盲文系统,这种点字系统使得盲人可以用指尖阅读。一个盲文字符由1~6个点组成的点集构成。点和空白间隔不同的排列方式代表字母表上不同的字母,如图15所示。附加不同的字符代表数字、标点符号以及常见的声音和文字。有经验的盲文阅读者每分钟可以阅读约100个字。这种基于触觉的能力取决于对触觉细节的知觉。
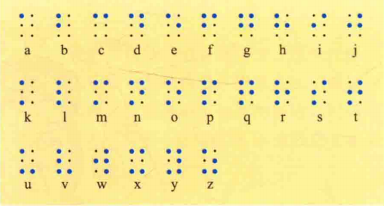
图15
(2)精细纹理
时间线索识别精细纹理,由帕西尼氏小体负责。在Hollins等人(Hollins,Bensmaia和Washburn,2001)的实验中,分别对高频和低频两种频率进行适应,为了使低频刺激适应(使被试无法区分低频刺激),可以使皮肤受到10赫兹刺激6分钟的振动;为了使高频刺激适应(帕西尼氏小体的适应)(使被试无法区分高频刺激),可以使皮肤受到250赫兹刺激的振动。然后,对被试呈现两种精细纹理,让被试通过触觉判断哪个纹理更精细。结果表明,当被试适应10赫兹的刺激时,他们可以报告两种纹理的区别。然而,适应250赫兹的刺激后,就不能报告两种精细纹理的区别了。因此,证明了时间线索决定精细纹理。
4.客体感知与定位
(1)主动触觉与被动触觉
主动触觉,即通过手指和手的积极触摸来探索客体。在这种条件下,你在客体表面移动手指会让你更加投入加工过程,并且有更多的控制。当采用主动触觉识别物体时,需要使用到三种不同的系统:(a)感觉系统,包括触觉、温度、纹理和运动以及手和手指位置的感觉;(b)运动系统,包括手指和手的运动;(c)认知系统,思考由感觉系统和运动系统提供的信息。而被动式触觉发生在触觉刺激与皮肤相接触时,如探测两点阈限的实验。(Goldstein和Brockmole(著),张明(译),2018)
将主动式触觉与被动式触觉相比,研究者倾向于认为被动式触觉与皮肤感觉体验有关,而主动式触觉与客体被触碰有关。例如,如果有人把尖的物品压在你的皮肤上,你可能会说"我感觉到皮肤上的刺痛"。然而,如果你用你的手指去按压尖的物体,你可能会说"我感觉到了一个尖锐的物体"(Kruger,1970)。也就是说,被动式触觉感受到的是皮肤上的刺激,而主动式触觉是对接触的物体的体验。
一项研究中,蒙上眼睛的被试通过主动触觉识别随机呈现的3D目标(如书、萝卜、鸡蛋、铁锤、钮扣和蜡烛等物品)。被试在此任务中的表现出奇得好(平均约96%左右的正确率)。上述结果表明人们在触觉探索中记住普通物体的能力还是相当好的。这需要被试在充足的时间下进行,如果只是短暂呈现刺激物,则被试的表现会受损,这说明在主动触觉中,运动与触觉信息的整合在触觉探索刺激物的记忆中起到了重要作用。(Gallace和Spence(著),涂阳军(译),2018)
(2)探索程序
在主动触觉中,Lederman和Klatzky(1987;1990)在观察被试进行辨别时,发现人们采用了一些特别的动作,研究者称之为探索程序。被试进行的判断任务不同时,探索程序也不同。如图16显示了四种探索程序。例如,人们采用侧向滑动和按压来判断纹理,采用环绕和轮廓跟踪的动作来判断形状。
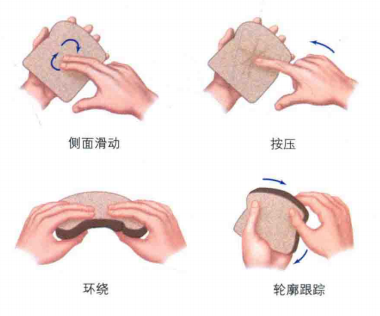
图16
(3)视角依赖与视角独立(覃缨惠,於文苑,傅小兰和刘烨,2022)
当触觉识别三维物体时,人们需要整合一个物体的多个触觉角度,即来自不同位置和不同手指的触觉信息,从而形成物体表征用于物体的定位、识别和操作(Heed,Buchholz,Engel和Röder,2015;Yau,Kim,Thakur和Bensmaia,2016)。这种手部触摸的角度在以往研究中也被称为"视角"。正如视角存在视角偏好(11-3:空间坐标),研究发现触觉识别三维人造几何物体(不熟悉的物体)时也存在视角偏好。当物体正对被试的一面用布遮盖,只能触摸背对被试的那一面时,这种背面视角条件相对正面视角(物体背对被试的那一面被布遮盖,被试只能触摸正对自己的那一面)的触觉物体识别绩效更好(Newell,Ernst,Tjan和Bülthoff,2001)。研究者认为这可能是由于人们惯用的触摸方式是拇指不动,其它四根手指探索,这种限制使得触觉探测偏向于物体背面"视角"(Lacey,Peters和Sathian,2007)。
上述两项研究采用的都是不常见或没见过的人造几何物体,可能是因为人们对这类物体不熟悉,因而导致识别受到视角影响。因此有研究对比了熟悉的三维物体(例如,玩具马、玩具房子)与人造几何物体的触觉识别,发现对于不熟悉的三维物体,在触觉识别和视觉识别都受到物体视角变化的影响,即都是视角依赖;对于熟悉的三维物体,触觉识别不受物体视角变化的影响,即视角独立(Woods,Moore和Newell,2008)。如果在被试对不熟悉的三维几何物体进行一定的触觉学习后,对其进行触觉识别也可以不再受视角的影响(Lacey,Pappas,Kreps和Lee等人,2009)。另外,与蒙眼的正常人相比,早期盲人(三岁以前就失明的盲人)对人造几何物体的触觉识别是视角独立的(Occelli,Lacey,Stephens和John等人,2016)。
总的来说,蒙眼正常人与视障者在这方面的差异,可能是因为视障者缺乏视觉经验,导致在触摸和加工物体信息时更关注物体各部分之间的空间关系(Occelli,Lacey,Stephens和John等人,2016),同时也有可能是因为视障者的触觉经验更丰富,可以更有效地获取物体各部分之间空间关系的触觉信息。相比之下,蒙眼正常人无法像视障者那样有效地获取空间关系的触觉信息,相对更加依赖于物体特征的触觉识别,因此对于不熟悉的三维物体,更容易受到视角变化的干扰。
(4)脸孔识别与身体识别(Gallace和Spence(著),涂阳军(译),2018)
在一项探查触觉面孔识别的研究中,遮住眼睛的被试必须通过手部探索以熟知目标面孔(目标从15个真实面孔中挑选一个出来)。在完成编码后,被试必须从干扰面孔的呈现中努力辨别哪一张面孔是先前呈现过的(两个干扰面孔和一个目标面孔)。研究结果表明,被遮住眼睛的被试能够在三个面孔中识别出目标面孔,而且正确率超过80%。在另外一项研究中,被试被问及为"他们到底使用一些什么样的线索从干扰面孔中正确辨识出目标面孔",结果发现,被试使用了约70%的几何属性(如面孔的整体形状、眼睛的相对位置及鼻子的长度等)和30%的材料属性(如皮肤的光滑与柔软)。上述结果表明面孔的宏观几何特征(如空间布局)和微观几何特征共同支撑识别任务。然而,刺激物的宏观属性似乎比微观属性的使用频率更高。这与面孔识别中更需要全局性属性一致(9-20:面孔识别)。
在一项对身体触觉记忆的研究中,要求被试从一组干扰物中仅凭触觉探索来辨认出其伴侣或新生儿。该研究发现,在58%的试次中(33%为基线),被试能够仅通过触摸手背部或前额就能从两个干扰物中辨识出其伴侣。这说明人们能通过触觉线索识别高度熟悉的个体。在另外一项实验中,新生儿父母亲必须从三个干扰婴儿中辨识自己的小孩。在该研究中,仅允许父母触摸孩子的手背或脸颊侧面,实验中尽管父母亲无法辨识其小孩,但他们能够辨识出只有7个小时大的婴儿。另外该实验还发现,父母亲能够辨识出两个基本的材料特征,材质与温度,并将其作为最突出的特征。
(5)表象在触觉加工中的作用
对触觉刺激物的某些方面进行加工时,可能会有一些触觉信息被转化为视觉编码信息(视觉表象),从而对触觉加工造成影响。一项研究要求先天性盲者与蒙眼正常人执行一项3D触觉刺激物配对任务,这两个刺激物的旋转角度不同,因此需要使用心理旋转将它们对齐(9-27:视觉表象,旋转角度差的大小与反应时间大小呈线性关系,心理旋转的角度越大,被试的反应时间越长)。研究结果表明,被试在触觉任务中的反应时与目标角度差大小同样存在着线性关系。这说明,蒙眼正常被试比盲人被试均在心理旋转过程中均使用了意象,前者可能使用视觉意象,后者可能使用触觉意象。另外,蒙眼正常被试比盲人被试反应速度更快,犯的错误也更少。这可能是因为视觉意象比触觉意象更易于处理和操控。(Gallace和Spence(著),涂阳军(译),2018)
(6)定位(Gallace和Spence(著),涂阳军(译),2018)
对触觉刺激定位需要使用到参考系。触觉的参照系分为:(a)视网膜参照系,基于刺激在视网膜中的定位;(b)空间参照系,基于刺激在外部空间中的定位,它又可以分为以观察者的身体中线为参照或以基于目标自身为参照。
在一项实验中,触觉刺激在两手手指上从左到右或从右到左运动,当被试将手靠在一起时,在刺激运动方向辨别任务中,被试准确率表现极佳(超过90%的正确率)。相反地,当被试双手手指交叉时,表现迅速恶化(正确率下降至60%)(图17)。
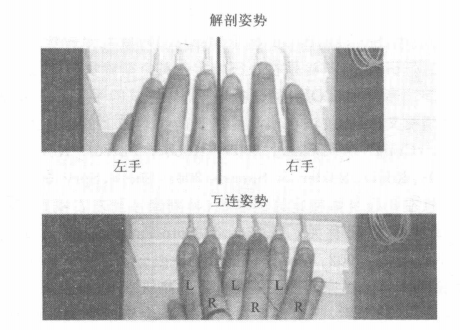
图17
一项实验研究了不同感觉通道下,被试对复杂人造设计物的识别问题。在实验中,在学习阶段,被试首先必须学习一个由不同目标物随机排列在不同位置所构成的场景。在测试阶段,实验者调换了场景中(15个目标物中)两个目标物的位置,并要求被试指认哪些目标物被交换了位置。场景包含两种展示方式,触觉(被试仅通过触摸了解场景中的刺激物)和视觉(被试观看场景中的刺激物)。学习阶段和测试阶段的展示方式可以不同,如都是视觉,或一个视觉一个触觉。如果学习阶段呈现使用视觉展示场景,实验者给予被试10秒钟探索这些目标物,而使用触觉展示场景时,则给与了60秒钟探索触觉展示物。研究结果表明,与学习和测试阶段使用相同感觉通道相比,当两个阶段的通道不同时被试在识别任务上的表现更差。研究者认为,被试在跨通道和通道内的表现差异可能与视觉和触觉的空间布局方式有关。更特别的,研究者认为,触觉空间表征存在扭曲,即触觉空间会被压缩且远离身体中线。因此,与视觉空间相比,触觉空间可能使用了不同的空间表征。
五.触觉记忆与注意(Gallace和Spence(著),涂阳军(译),2018)
触觉是最原始的感觉通道(相对于视觉与听觉),视觉提供的是一种"间接"信息(人们无法被图像撞击或被图像吃掉,也无法吃掉图像),人们为了处理这类信息,需要经过认知系统大量的运算。相对地,触觉提供的是"直接"信息。因此,该类信息仅需要最低程度的计算。从发展的角度来看,触觉首先得到发展,且怀孕8个月时胚胎就对触觉刺激敏感。而视觉系统在发挥其全部功效前需要长时间的发展。基于此,触觉能力与视觉能力会存在明显差异,此差异可能反映了触觉信息加工具有"更原始的"本质,且仅需要极少的加工处理。(Gallace和Spence(著),涂阳军(译),2018)
1.神经机制(赵迪,2017)
在触觉工作记忆的研究中,通常采用触觉的延时匹配任务。在该任务中,两个不同频率的触觉刺激分别施加于猴子(或人类)被试的某一手指上,两个触觉刺激之间由一段延时分隔开,当第二个触觉刺激结束后,被试需要判断先后呈现的两个触觉刺激的频率是否相同。这个任务包含了触觉工作记忆的各个阶段:对第一个触觉刺激的编码;在延迟阶段对该触觉刺激的保持;对第二个触觉刺激的编码;比较前后出现的两个触觉刺激的频率是否相同;和将比较的结果转换为动作。
Harris等研究者使用触觉延迟匹配任务在人类被试身上发现:初级体感皮层S1参与触觉工作记忆的早期保持阶段。当保持阶段的时间为1秒时,被试比较同一个手指上接受先后两个触觉刺激的正确率高于比较在两只手同一手指的触觉刺激的正确率。另外,在早期延迟阶段(300毫秒和600毫秒)给S1施加单脉冲经颅磁刺激会影响触觉工作记忆的成绩,而在晚期延迟阶段的(900毫秒和1200亳秒)给S1施加单脉冲经颅磁刺激则不受影响。这些结果显示,当保持阶段较短时(1秒),S1表征了触觉工作记忆中的感觉信息。而当保持阶段时间较长时,触觉表征的工作记忆脑区扩大到双侧次级体感皮层S2。
2.工作记忆的容量(王春地和王大辉,2021)
研究者将多个触觉刺激同时呈现在被试的手指上,被试需要记住并报告触觉刺激呈现的手指位置。研究结果表明,参与者平均可以记住3.5~4.5个位置(Auvray,Gallace和Spence,2011;Bliss,Crane,Mansfield和Townsend,1966;Gallace和Spence,2009)。Bancroft等人(Bancroft,Hockley和Servos,2012)采用序列刺激呈现在单手指上的延迟匹配任务来检验振动触觉工作记忆是否可以存储多个信息。实验中相继呈现3个振动刺激,前两个频率不同的振动作为记忆刺激,最后一个作为测试刺激,被试需要判断测试刺激频率是否和两个记忆刺激中的任一刺激频率相同。实验发现被试的整体正确率超过随机水平,因此研究者认为振动触觉工作记忆可以存储多于一个的振动刺激频率。同一时间内觉知触觉刺激的数量仅为1~3个,而且觉知数量取决于刺激呈现的肢体(或者说肢体对应的触觉皮质大小)。相较于视觉刺激,触觉短时表征仅具有非常低的容量。
3.触觉注意
皮层神经元不仅仅受物体特性的影响,也受到知觉者是否给予注意的影响。Steven Hsiao和他的同事们(1993,1996)记录了猴子手指扫描凸起字母时S1和S2区域的神经元反应。在触觉注意条件下,猴子执行的任务是必须将注意集中在呈现给手指的字母上。在视觉注意条件下,猴子需要将注意集中在无关的视觉刺激上。研究结果表明,在两种条件下,猴子的手指接触了同样的刺激,但是触觉注意条件下神经元的反应更大。因此,感受器的刺激能够引起反应,但是反应的大小可能受到知觉者注意和其他认知加工过程的影响。
在一项实验中,研究者向被试呈现一些随机序列,序列元素可能是视觉的、触觉的或听觉的,并出现在固定点的某一边,被试需要对刺激(相对于固定点)的方位进行反应。一些感觉通道出现的概率会比其他通道高,目的在于使被试将注意聚焦于该感觉通道。结果表明,相较于视觉或听觉,在触觉聚焦的条件下,被试对触觉目标物的反应更快(而且也更为精准)。研究结果表明,相较于注意被导向听觉或视觉,对触觉的自主注意能使被试对触觉刺激物的反应更快。
在视觉中,通常需要多个视觉刺激物呈现在场景中才会触发视觉变化视盲。但在触觉中,2~3个触觉刺激就能触发触觉变化视盲。另外,视觉干扰物会损害对触觉通道变化的感知。
4.触觉错觉
尽管常识表明触觉刺激的意识定位仅依赖于被刺激的身体区域,现有的科学证据表明或许并非如此。例如,要求被试报告感知到的振动触觉刺激的位置,但被试的上肢被放入遮盖屏之下使视线无法触及,而盖屏上放置一双填充的橡胶手套。研究发现,当用触觉刺激同时触碰橡胶手套和自己的手,被试经常报告刺激来自橡胶手的位置,他们甚至感觉橡胶手就像其手一样。该结果受到了橡胶手位置与被试自己手姿势间相容情况的影响。另外,当橡胶手与参与者自己的手一样大时,视觉干扰物的效应最强。以此结果为基础,研究者认为大脑对视觉位置信息的加权更大(与本体感受信息相比)。
皮肤跳跃幻觉或发肤兔跳幻觉是指,靠近腕部轻拍5下,紧接着在前臂中心位置敲击5下,接着又在肘部附近敲击5下,当所呈现序列的时间间隔在70~150毫秒之间时,但被试经常报告这些敲击是沿胳膊均匀分布而非在其物体所处的实际位置,如图18。
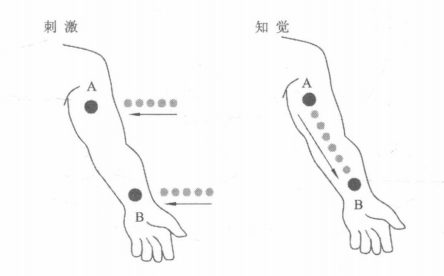
图18