1. 完整仿真与强化学习框架:Robosuite
如果你希望有一个开箱即用、专门为机器人操作(Manipulation)和深度强化学习设计的环境,Robosuite 是目前的绝对标准(Standard Benchmark)。
权威性: 由得克萨斯大学奥斯汀分校(UT Austin)、斯坦福大学(Stanford)等顶尖机器人实验室联合维护(ARISE Initiative)。
核心优势:
原生支持 Franka Panda: 内置了极其精确的 Franka 动力学模型。
丰富的控制器库: 已经写好了包括关节阻抗控制(Joint Impedance)、操作空间控制(OSC / 笛卡尔空间控制)在内的底层动力学控制器,不需要你从解雅可比矩阵算起。
高度适配数据驱动: 原生支持收集带有相机观测的高频数据,非常适合用于训练行为克隆(Behavior Cloning)或强化学习策略。
纯 Python + Windows 友好: 安装极其简单,在 Windows 的 Conda 环境下一键 pip install 即可运行。
项目链接: https://github.com/ARISE-Initiative/robosuite
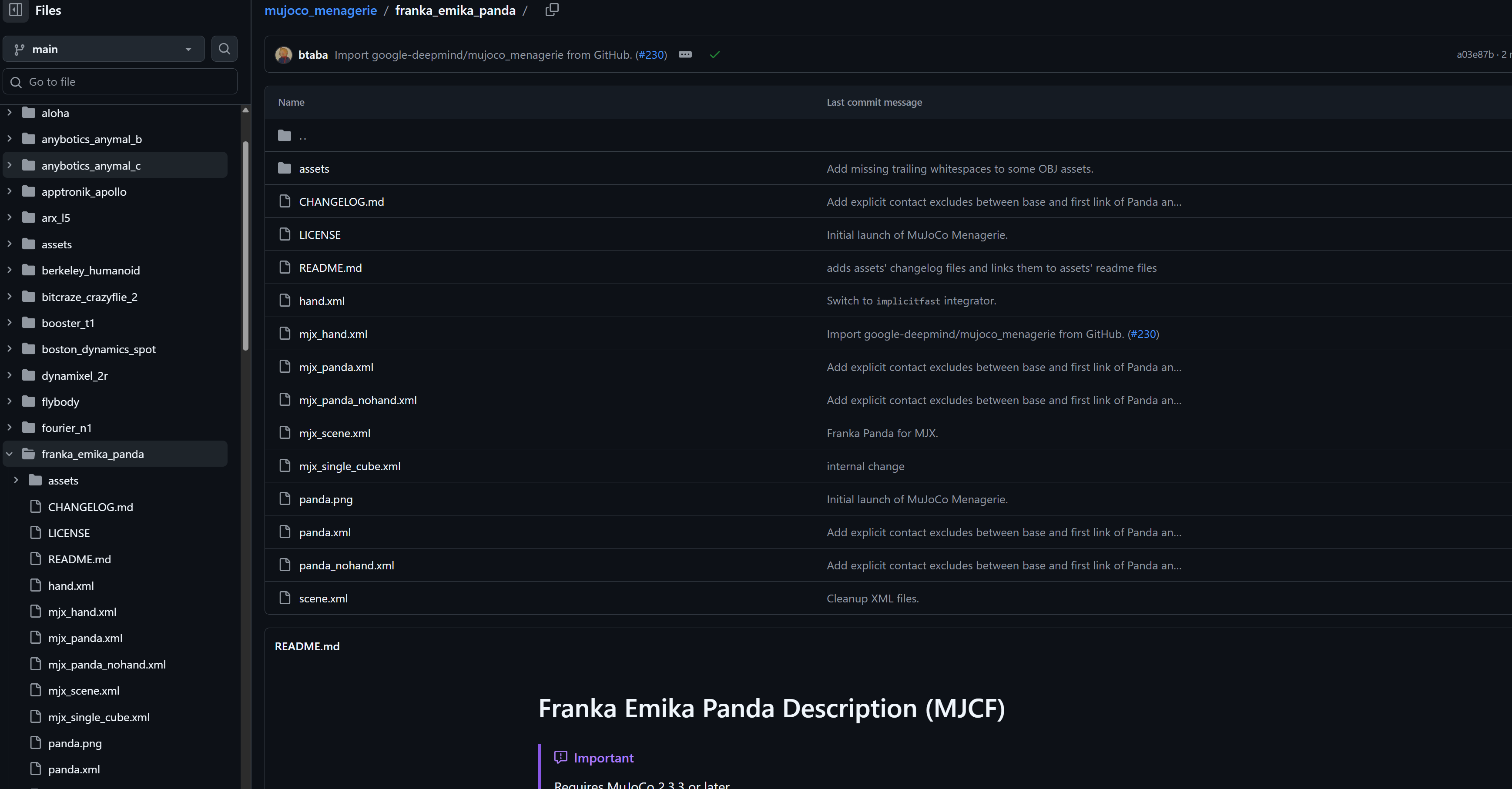
2. 纯粹的高精度官方物理模型库:MuJoCo Menagerie
如果你不需要 Robosuite 那么庞大的任务框架,而是想从零开始,自己写最底层的 mujoco.mj_step() 控制循环(类似你在 PyBullet 里使用 p.stepSimulation() 的习惯),那么你应该直接使用 DeepMind 官方的模型库。
权威性: 由 MuJoCo 的官方开发团队(Google DeepMind)直接维护。
核心优势: 这不是一个"代码框架",而是一个"模型动物园"。这里面的 Franka Panda 的 XML 模型文件(MJCF 格式)是目前世界上最精确的开源版本。它的质量、惯性张量、关节摩擦力、阻尼系数都经过了官方的真机校准。
项目链接(直接指向 Franka Panda 目录): https://github.com/google-deepmind/mujoco_menagerie/tree/main/franka_emika_panda
3. 极致纯粹的算法教科书:mjctrl
项目链接:https://github.com/kevinzakka/mjctrl
为什么推荐它: 这是由知名机器人研究员 Kevin Zakka 编写的 MuJoCo 控制器集合。它的最大特点是单文件实现(Single-file implementations)。没有任何复杂的类继承和多重目录嵌套,所有的雅可比矩阵提取、动力学补偿和控制律计算都在一个 opspace.py(操作空间控制,即笛卡尔阻抗控制的基础框架)文件中一览无余。
如何使用: 代码极其干净,完全不挑操作系统。虽然它的示例里可能用了 KUKA iiwa 或 UR5,但因为纯粹基于 MuJoCo 的原生 Python 绑定,你只需要把 XML 模型路径替换成上一条回复中提到的官方 Franka Panda 模型,它就能直接跑起来。非常适合你一行一行对照着数学公式去阅读和修改。

4. 量身定制的 Franka 阻抗游乐场:impedance_control_mujoco
项目链接: https://github.com/wengmister/impedance_control_mujoco
为什么推荐它: 这是一个专门针对 Franka 机械臂在 MuJoCo 中实现阻抗控制搭建的"游乐场"。作者的初衷和你完全一致------探究和对比不同的阻抗控制策略对机械臂柔顺性和操作表现的影响。

5. Deoxys (最硬核的实机控制接口)
如果你想把你在 MuJoCo 里跑通的画 8 字算法完美迁移到真正的 Franka 机械臂上,这是目前最好用的第三方库。
-
核心看点: 提供了非常稳定的 1kHz 力矩控制循环 封装,支持通过 Python 直接下发阻抗指令,绕过了原厂 Libfranka 繁琐的 C++ 配置。

6. Isaac Lab / Orbit (未来的趋势)
虽然你目前主要用 MuJoCo,但如果要大规模训练神经网络来学习阻抗参数,这个基于 NVIDIA Isaac Sim 的项目是必看的。
-
GitHub 链接: isaac-sim/IsaacLab (原名 Orbit,现已整合进 Isaac Lab)
-
核心看点: 极高精度的物理碰撞模拟,以及对 GPU 并行加速 的原生支持。