C# 基于OpenCv的视觉工作流-章40-特征找图
本章目标:
一、 图像查找原理;
二、 特征匹配;
三、 计算变换矩阵;
四、 目标定位;
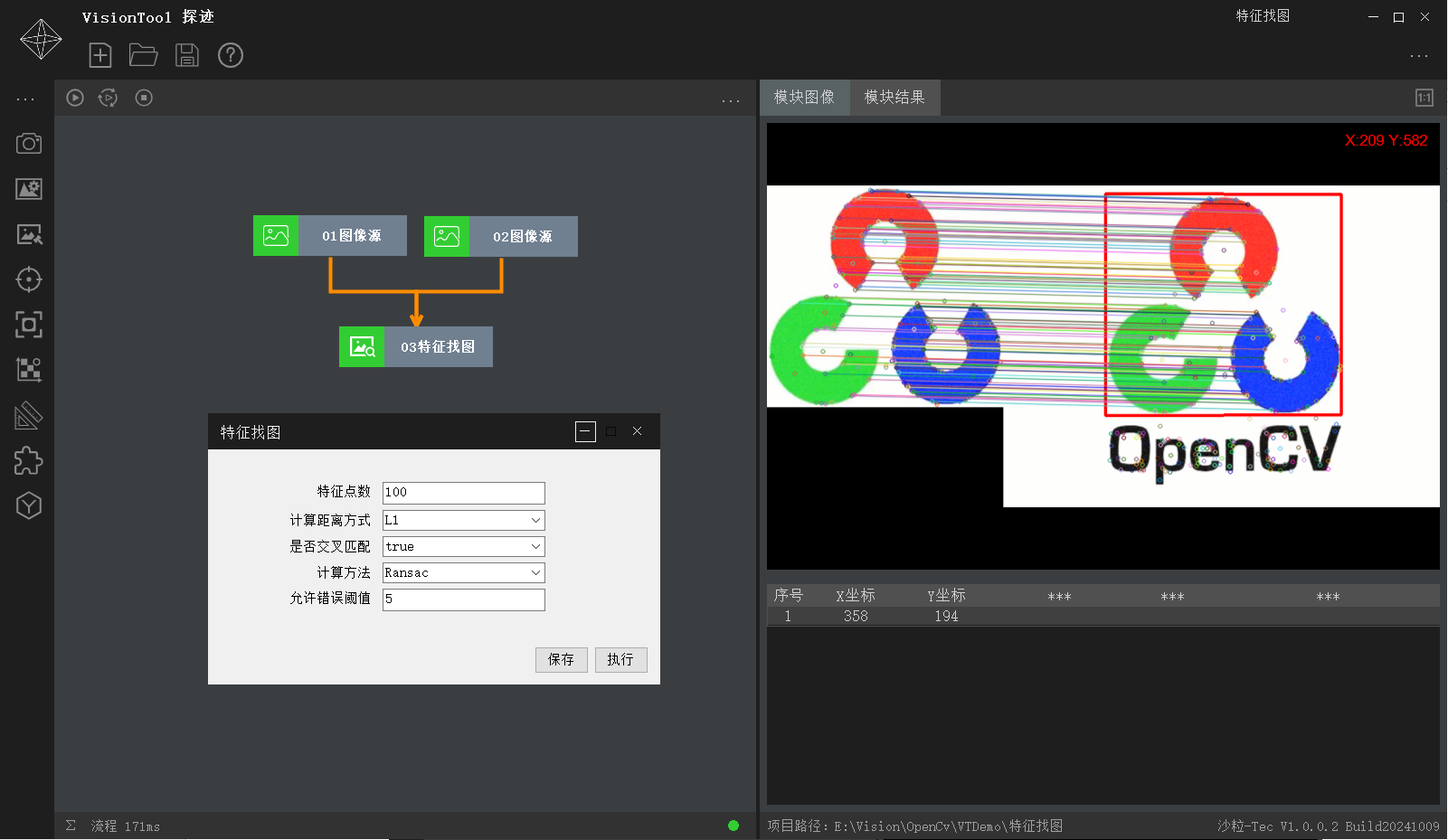
特征找图是提取查找图像的特征,去匹配被找图像的特征(即在章38、章39的基础上),得到匹配的两组特征点后,用两组特征点计算出变换关系(变换矩阵),最后将查找图像四角点,通过变换矩阵,计算出四角点在被找图中的位置,实现定位。。
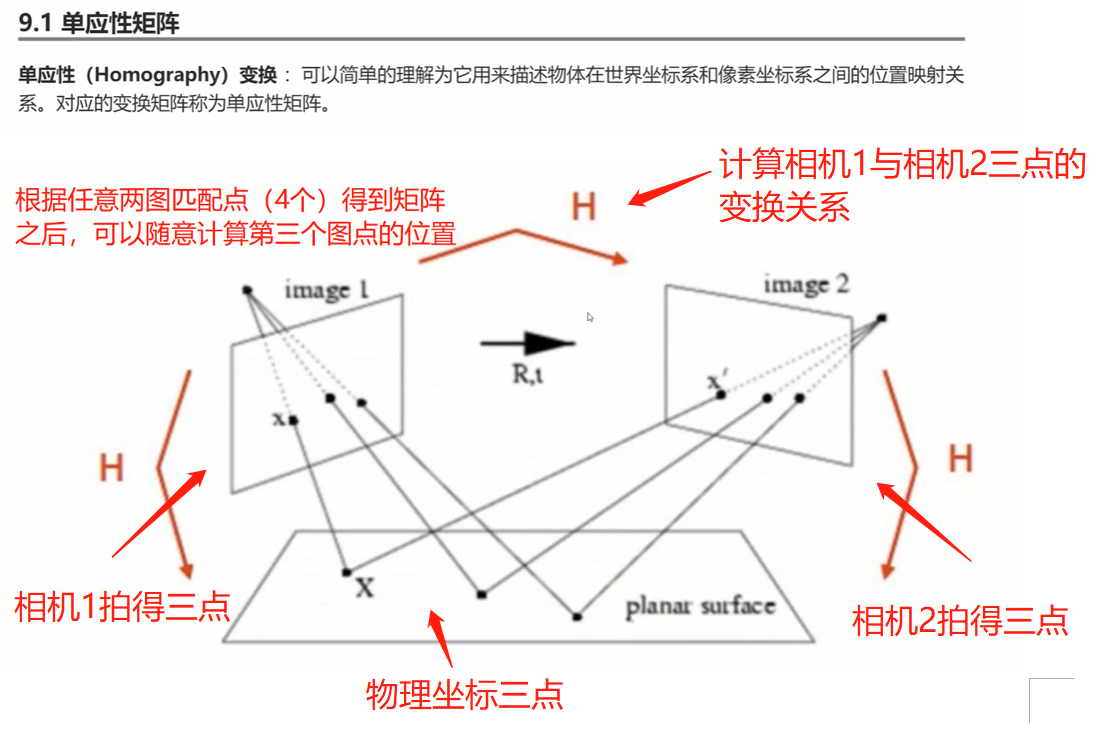
一、图像查找原理
如下图,根据两图中的点对应关系,可计算得到变换矩阵。详细原理,见文末链接

计算矩阵可用此算子
二、 特征匹配
参考章38-BF特征匹配,不再详述
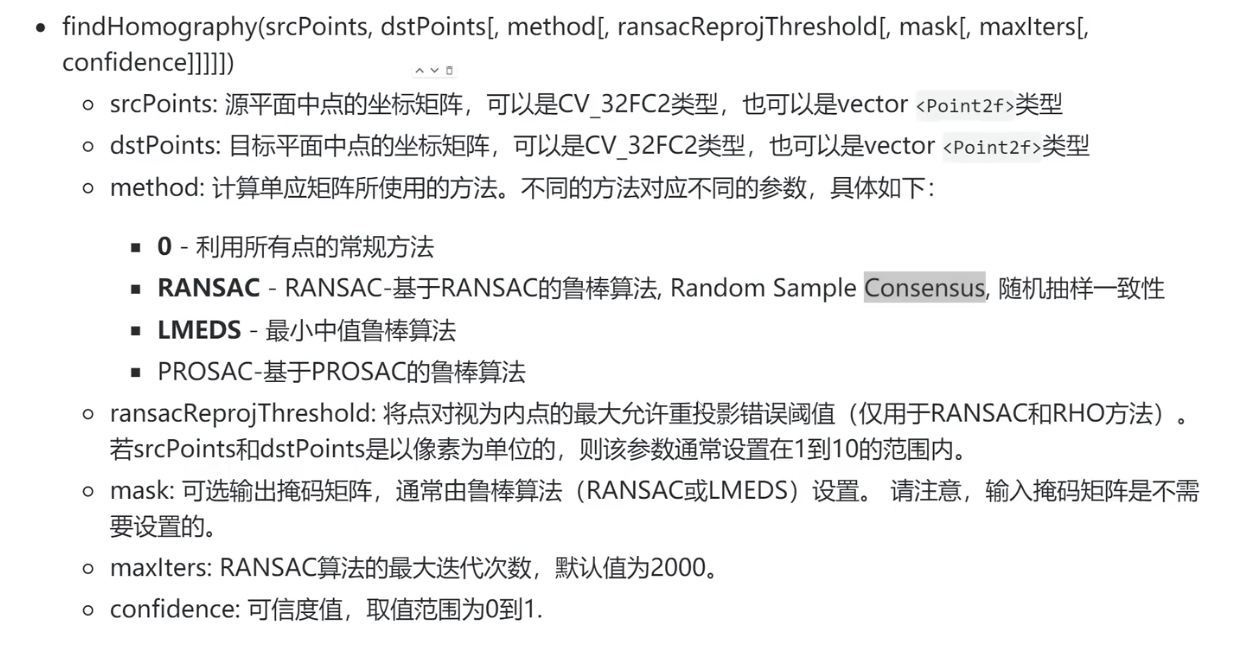
三、 计算变换矩阵
OpenCv 单应性矩阵可如下使用
Mat HMat = Cv2.FindHomography(point1, point2, HomographyMethods.Ransac, ransacReprojThreshold, null);
其中:参数1,为查找图(模板小图)的匹配点;
参数2,为被查找图(大图)的匹配点;
参数3,为计算方法;
参数4,为允许错误阈值;
说明:匹配点至少四个(四个计算方程式)
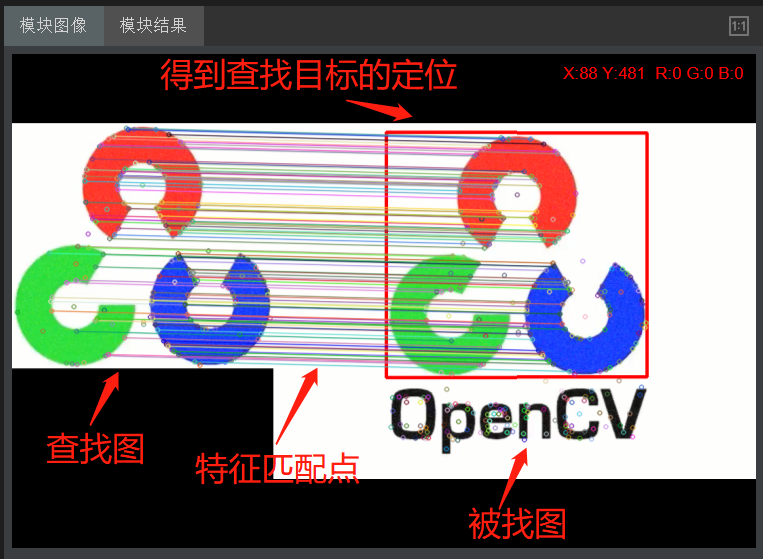
四、目标定位
先计算原图像的四个角点,组成点数组,再通过变换矩阵计算出在被找图中的四点位置。
OpenCv可如下使用
var srcPoint = Cv2.PerspectiveTransform(img1Bounds, HMat);
其中:参数1,为查找图(模板小图)的四个角点;
参数2,为变换矩阵;
srcPoint,为输出的定位点;
将定位点绘制成矩形框,效果如下图,得到图像的定位
"VisionTool 探迹"免费视觉工具
下载地址:https://pan.baidu.com/s/11tktKOSnepLNIEqNbvnv6w?pwd=qv5i
版本已更新为V1.0.0.2,更新内容如下:
1.增加点查找;
2.增加交点查找;
3.增加轮廓点距,实现两轮廓各点间距测量;
4.增加点-点间距,实现独立点与独立点的距离测量;
5.增加点-线间距,实现独立点与独立线的距离测量;
6.增加线-线间距,实现独立线与独立线的距离测量;
7.增加线-线角度,实现独立线与独立线的角度测量;
8.增加轮廓段距,实现两轮廓的分段间距测量;
9.缺陷检测模块中,修复ROI显示功能;
"VisionTool Halcon"付费视觉工具
下载地址:https://pan.baidu.com/s/1v832KTonDYS6oNnWG2iZtQ?
对应系列文章"C# 基于Halcon的视觉工作流",欢迎前往阅读。
上述内容需要一定的技术功底,本章至此已结束,欢迎阅读下章,谢谢!