对于自动驾驶(AV)开发,集成到开源 CARLA 自动驾驶模拟器中的 Omniverse NuRec 库提供了强大能力。这是一项实验性新功能,适用于 NVIDIA Physical AI Dataset 中已完成重建的示例场景。
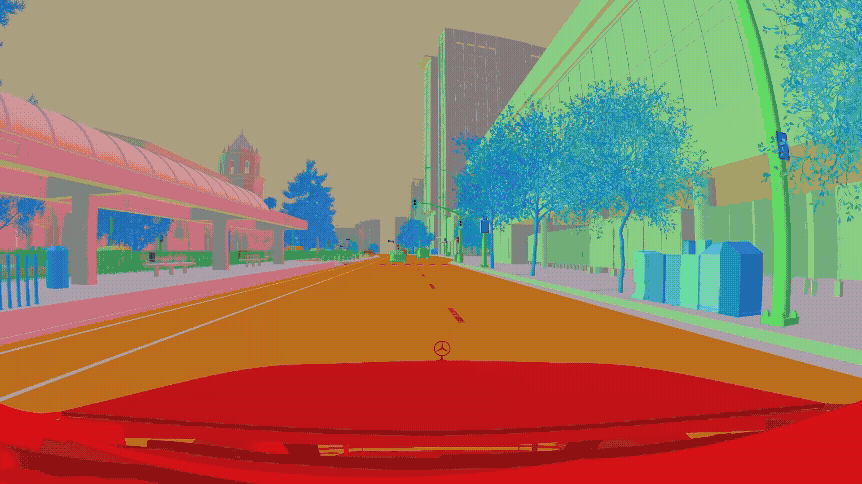
前向车载摄像头视角下,真实世界繁忙街道在仿真中的重建效果。

图 1:用于 CARLA 中 Omniverse NuRec 渲染流程的示例场景
步骤 1:运行 CARLA 并配置脚本
从 Physical AI Dataset 选择一个场景,然后进入 CARLA 目录并运行:
bash
./PythonAPI/examples/nvidia/install_nurec.sh步骤 2:回放场景
然后使用以下命令回放 Omniverse NuRec 场景:
bash
source carla/bin/activate
cd PythonAPI/examples/nvidia/
python example_replay_recording.py --usdz-filename /path/to/scenario.usdz步骤 3:采集数据
你还可以在仿真中采集数据用于进一步测试。以下是用于生成数据集的图像采集示例:
bash
source carla/bin/activate
cd PythonAPI/examples/nvidia/
python example_save_images.py --usdz-filename /path/to/scenario.usdz --output-dir ./captured_images该集成方案使你可以在可控仿真环境中回放真实世界驾驶过程,并保留原始场景中的参与体与动态行为。
如何进一步增强重建场景
想让重建场景更进一步?NVIDIA Cosmos Transfer(一个多 ControlNet 世界基础模型)可通过可控视频生成能力,显著增强机器人与自动驾驶仿真。你可以使用 Cosmos Transfer 合成多样化环境、光照条件和天气场景;也可借助分割、深度图、HD 地图等多模态控制方式动态添加与编辑对象。
一张 GIF 展示从语义视图切换到秋日晴天驾驶场景。
图2:Cosmos Transfer 通过新增天气、光照和地形条件提升场景多样性
这一方法可简化高场景覆盖的数据集构建流程,降低人工成本,并实现严格、逼真的验证。随着 Cosmos Transfer-1 蒸馏后将扩散步数从 70 步降低,你可以在 30 秒内生成可控的高真实感视频。基于此类性能提升,Cosmos Transfer-2 即将发布,将进一步加速自动驾驶开发中的合成数据生成(SDG)。
为什么基于高斯的渲染能加速仿真工作流
3D 高斯表示在真实世界重建与仿真方式上带来了变革性提升。通过打通从数据采集到高真实感交互环境的链路,Omniverse NuRec 库利用基于高斯的渲染,大幅加速仿真工作流,实现可扩展且稳健的测试。
COLMAP 成熟的 SfM 流水线与 3DGUT 高级渲染能力相结合,形成了可应对复杂真实场景的稳健基础------从困难光照到复杂相机畸变,这些问题往往会让传统重建方法失效。
开始在交互式仿真中渲染真实世界场景
无论你是希望突破 sim-to-real 边界的研究者,还是追求高效高保真场景生成的工程师,这些进展都能帮助你快速迭代,并更有信心地部署基于真实复杂性的解决方案。
准备好开始了吗?
- 下载 NVIDIA Physical AI Dataset 中的示例重建数据
- 访问
nv-tlabs/3dgrutGitHub 仓库获取 3DGUT 实现 - 在 NVIDIA Isaac Sim 5.0 中进行基于物理的虚拟环境机器人仿真
- 了解如何将 CARLA Simulator 与 NVIDIA Omniverse NuRec 集成