目录
[1.1. 核心元件:变容二极管(Varactor Diode)](#1.1. 核心元件:变容二极管(Varactor Diode))
[1.2. 负载电容与谐振频率的关系](#1.2. 负载电容与谐振频率的关系)
[1.3. 工程意义与应用](#1.3. 工程意义与应用)
[1.4. 重要参数](#1.4. 重要参数)
[1.5 拓展](#1.5 拓展)
[(1). 指标量级对比:调频能力 vs. 老化速度](#(1). 指标量级对比:调频能力 vs. 老化速度)
[(2). 调节的物理极限:压控"触顶"](#(2). 调节的物理极限:压控“触顶”)
[(3). 在深空探测任务中的实际操作](#(3). 在深空探测任务中的实际操作)
[(4). 为什么依然要选老化率低的器件?](#(4). 为什么依然要选老化率低的器件?)
[1.5.2 稳态相位噪声](#1.5.2 稳态相位噪声)
[(1). 什么是"稳态"?](#(1). 什么是“稳态”?)
[(2). 什么是"相位噪声"?](#(2). 什么是“相位噪声”?)
[(3). 如何解读不同频段的噪声?](#(3). 如何解读不同频段的噪声?)
[(4). 为什么在深空探测任务中很重要?](#(4). 为什么在深空探测任务中很重要?)
[(1). 频率温度稳定性(中长期稳定性)](#(1). 频率温度稳定性(中长期稳定性))
[(2). 频率老化(长期稳定性)](#(2). 频率老化(长期稳定性))
[(3). 阿伦方差(短期稳定性)](#(3). 阿伦方差(短期稳定性))
[(4). 外部环境干扰(电压与负载允差)](#(4). 外部环境干扰(电压与负载允差))
[(1). 它描述的是"变化的剧烈程度"](#(1). 它描述的是“变化的剧烈程度”)
[(2). 为什么说它"一直存在"?](#(2). 为什么说它“一直存在”?)
[(3). 在ZD048 规格中的实际意义](#(3). 在ZD048 规格中的实际意义)
[2.1 晶振的特性](#2.1 晶振的特性)
[2.1.2. 中心电压与标称频率](#2.1.2. 中心电压与标称频率)
[2.1.3. 结合 ZD578 的实际指标换算](#2.1.3. 结合 ZD578 的实际指标换算)
[2.1.4. 的作用](#2.1.4. 的作用)
[2.2 搭配DAC的位宽推导方法](#2.2 搭配DAC的位宽推导方法)
[(1). 推导逻辑](#(1). 推导逻辑)
[(2). 前提条件](#(2). 前提条件)
[目的:决定至少买多少位的 DAC 芯片。](#目的:决定至少买多少位的 DAC 芯片。)
[(1). 推导逻辑](#(1). 推导逻辑)
[(2). 前提条件](#(2). 前提条件)
[目的:写 FPGA 控制代码时,算出增加 1 个数值,频率到底变了多少。](#目的:写 FPGA 控制代码时,算出增加 1 个数值,频率到底变了多少。)
1.电压调节频率的原理

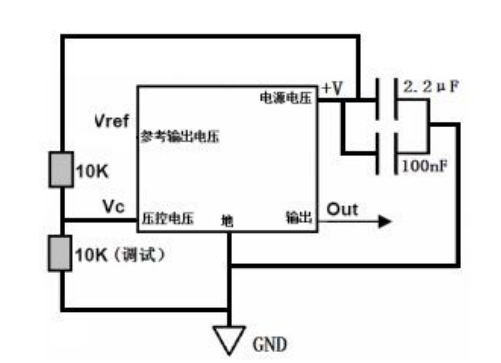
图中展示的是一款高精度恒温晶体振荡器(OCXO)。在技术指标中看到的"电调范围"以及引脚定义中的 (压控) ,共同指向了这种现象:压控特性(Voltage Control) 。这种通过电压调节频率的现象,在电子工程中通常被称为压控晶体振荡器(VCXO/VCOCXO)。从底层的角度来解析该现象:
1.1. 核心元件:变容二极管(Varactor Diode)
实现电压控频的核心部件是变容二极管。
-
原理: 变容二极管是一种利用 PN 结电容随反向偏置电压变化而变化的特殊二极管。
-
作用: 当你在引脚 2(
)施加不同的电压时,变容二极管的等效电容值会随之改变。
1.2. 负载电容与谐振频率的关系
晶体振荡器的物理谐振频率不仅取决于石英晶体本身,还取决于与其并联或串联的负载电容(Load Capacitance, )。
根据晶振的频率公式,负载电容 与输出频率
的关系大致如下:
(其中 为串联谐振频率,
为动态电容,
为静态电容)
-
调压过程: 调节
-
现象: 通常情况下,控制电压升高,变容二极管电容减小,总负载电容减小,从而导致输出频率升高。
1.3. 工程意义与应用
虽然晶振以"稳"著称,但在高精度应用中,必须有微调手段:

-
补偿老化(Aging Compensation) 晶振随时间推移会产生频率漂移(一般是非线性)(图中显示年老化率为
-
锁相环(PLL)频率同步: 在通信系统中,需要将本地晶振的频率与远程参考信号完全同步。通过
-
频率调制: 在某些应用中,可以直接利用
1.4. 重要参数

- 电调范围(
| 单位 | 全称 | 数值 | 典型应用 |
| ppm | Parts Per Million | 10\^{-6} | 普通晶振、工业级时钟 |
| ppb | Parts Per Billion | 10\^{-9} | 高性能 OCXO、基站时钟 |
ppt Parts Per Trillion 10\^{-12} 原子钟(如铷钟)、深空导航参考源 ppm 是 Parts Per Million 的缩写,意为"百万分之一 "。假设你有一个标称频率为 10 MHz 的晶振,其频率稳定性为 1 ppm :
这意味着该晶振在规定的工作条件下,其实际输出频率可能在
-
-
-
日老化率:

图中显示的日老化率 为 ,这等同于 0.0001 ppm (即 0.1 ppb)。在 10 MHz 下,这种级别的稳定性意味着每天的频率偏差仅为 0.001 Hz。在深空探测或高速信号处理中,低 ppm/ppb 值能有效降低通信系统的误码率(BER),并确保长距离测距的精度。
1.5 拓展
1.5.1老化率与电调频率的关系
老化率,如果一直老化,还能通过电调频率调节回来吗?对于简单直接的回答是:可以调节回来,但有"额度"限制。 可以把晶振的电调范围(Tuning Range)想象成一个"蓄水池",而老化(Aging)就是水位的缓慢流失。只要流失的水量没有超过蓄水池的总容量,你就可以通过调节电压把水位拉回到标准线。根据ZD048提供的技术手册进行的详细量化分析:
(1). 指标量级对比:调频能力 vs. 老化速度
我们要看"调频范围"是否能覆盖"任务周期内的总老化量"。以 ZD048 为例:
10年总老化量:
电频率调整范围:
分析: 电调范围(
(2). 调节的物理极限:压控"触顶"
虽然能调,但不能无限调。调节是通过改变压控引脚(
调节过程: 随着晶振不断老化,你需要逐年微调 V_c 引脚的输入电压(例如从
失效点: 当你的压控电压已经调到了手册规定的极限(例如
(3). 在深空探测任务中的实际操作
针对你正在做的深空项目,通常有以下两种校准策略:
地面遥控校准: 在长达数年的飞行中,地面站定期测量下行信号的频率偏差,然后发送指令给卫星,通过 DAC(数模转换器)修改晶振的
自动闭环校准: 如果系统内有更高精度的参考源(如原子钟或接收到的导航卫星信号),FPGA 可以通过算法自动调整输出给晶振的控制电压。
(4). 为什么依然要选老化率低的器件?
调节精度: 老化越快,意味着你需要更频繁地进行校准,且对压控电压的控制精度要求越高。
非线性风险: 压控曲线在高电压或低电压边缘往往具有非线性,老化严重的器件在后期调节时,频率步进会变得难以预测。
可靠性: 老化率在某种程度上反映了晶体切割工艺和封装真空度的质量。老化率越低,说明器件内部越稳定,在极端环境下(如你提到的 -180\^{\\circ}C)出现突发性跳频的概率越小。
1.5.2 稳态相位噪声
稳态相位噪声(Steady-state Phase Noise) 是衡量振荡器(如你提到的 OCXO)频率纯净度的核心指标。简单来说,它反映了频率在短时间内的"抖动"程度。从以下几个维度来深入理解:
(1). 什么是"稳态"?
在晶振的技术手册中,"稳态"是指器件已经完成了预热过程,内部的恒温槽(Oven)已经达到了热平衡状态 。
此时,外部环境温度、电源电压和负载都保持恒定 。
指标中的相位噪声是在这种"理想且稳定"的工况下测得的,排除了开机漂移或环境剧烈变化的影响 。
(2). 什么是"相位噪声"?
理想的晶振应该输出一个完美的正弦波,在频谱仪上表现为一条极窄的竖线(中心频率
单位:
负值越小越好 :例如
(3). 如何解读不同频段的噪声?
规格书给出的这组递减数据反映了时钟在不同范围内的稳定性:
偏离中心频率 性能指标 影响的系统环节 近端噪声 ( \<-95 到 -125\\text{dBc/Hz} 主要受恒温槽压力和晶体质量影响,决定系统的短期稳定性。 中端噪声 (100\\text{Hz} \\sim 1\\text{kHz}) -140 到 -150\\text{dBc/Hz} 影响多普勒测量和精细频谱分析。 远端噪声(底噪) (\\ge 10\\text{kHz}) -160\\text{dBc/Hz} 决定了 ADC 采样时的**宽带信噪比(SNR)**底限。 (4). 为什么在深空探测任务中很重要?
在深空探测中,信号经过亿万公里的传输会变得极其微弱。
如果本地晶振的相位噪声太大,那么在接收端进行变频处理时,晶振的噪声会直接"盖过"微弱的有用信号,导致通信中断。
对于雷达探测或精密授时,相位噪声直接决定了距离分辨率和时间基准的准确性。
(5)总结
稳态相位噪声就像是一个手电筒的光束。理想的光束是一条细线,而相位噪声就是光束周围散出的"虚光"。虚光越少(相噪越低),光束就越集中,能照到的地方就越远、越清晰。
1.5.3影响稳定性的核心参数
以下是影响该器件稳定性的核心参数及其具体指标:
(1). 频率温度稳定性(中长期稳定性)
这是 OCXO 最核心的稳定性指标。它描述了在工作温度范围内,频率随温度变化的波动程度。
具体指标 :
影响 :由于该器件内置了恒温槽,因此能在 -40℃ 至 70℃ 的宽温范围内保持极高的稳定性 。如果环境温度剧烈波动超过此范围,或者散热设计不当,将直接影响其锁定精度。
(2). 频率老化(长期稳定性)
指在恒定环境条件下,频率随时间推移产生的单向漂移。
具体指标 :日老化
影响:这是器件随"寿命"增长产生的性能退化。对于长期运行的系统,必须考虑定期校准以补偿老化带来的频率偏移。
(3). 阿伦方差(短期稳定性)
反映的是频率在短时间(如 1 秒)内的时域波动。
具体指标 :
影响:对于需要高精度同步的系统(如深空探测、通信同步),该指标决定了系统的瞬时同步能力。
(4). 外部环境干扰(电压与负载允差)
器件对外部电路环境变化的敏感度:
电压允差 :
负载允差 :
关键提醒 :协议特别建议选用线性电源 ,并在引脚处加装
(5)总结:哪个参数最主要?
如果您关注环境适应能力 ,频率温度稳定性 是最关键的。
如果您关注系统长期准确度 ,频率老化 的影响最大。
如果您关注电路设计对性能的影响 ,电源电压的纯净度(线性电源)是决定其实际表现的核心外部因素 。
1.5.4阿仑方差的理解
这种不稳定性(噪声)在每一秒、每一瞬间都存在 ,但它并不是一个"每隔一秒跳动一次"的固定偏差,而是一种统计规律。为了帮你更直观地理解阿伦方差(Allan Variance) 晶振中的物理意义,可以从以下几个维度来看:
(1). 它描述的是"变化的剧烈程度"
阿伦方差
指标
这意味着:如果你这一秒测量一次平均频率,下一秒再测量一次,这两次测量结果之间的相对偏差,统计学上期望在
(2). 为什么说它"一直存在"?
晶振内部的噪声(如白频率噪声、闪烁频率噪声)是随机且持续的。
瞬时性:在每一毫秒甚至更短的时间里,频率都在微小地晃动。
观测性:阿伦方差就像是一把"尺子"。当你选择 1s 作为刻度时,它告诉你这 1s 长度内的平均抖动是多少。
连续性:这种抖动是连续发生的。无论你从哪一秒开始测量,这种由于原子热运动、电路噪声导致的频率不确定性都会表现出来。
(3). 在ZD048 规格中的实际意义
对于这款 ZD048-18N-0211 晶振 :
短期抖动(1s) :
对比老化(长期) :相比于每天
通俗类比
想象你在操作一辆车,保持 100km/h 匀速行驶:
老化(Aging) :就像轮胎磨损,跑了一年以后,同样的油门只能跑
阿伦方差(Allan Variance) :就像路面的颠簸和发动机的微小震动。虽然仪表盘显示是
(4)转化成时间偏差来理解
将频率稳定性(无量纲的相对值)转换为时间偏差(Time Deviation,
其中
不同时间尺度下的时间偏差
经过 1 秒钟: 产生的偏差约为
- 作为参考,光在 1 皮秒内只能走 0.3 毫米。这说明它的瞬时稳定性极高,对于 10MHz 的信号(周期 100ns )来说,这种抖动仅占周期的千万分之三。
经过 1 小时(3600秒): 累积偏差约为
- 在深空探测的测距任务中,10 纳秒的误差对应的距离偏差大约是 3 米。
经过 1 天(86400秒): 累积偏差约为
关键对比:阿伦方差 vs. 老化率
在实际使用中,需要区分短期波动 和长期漂移,因为它们对时间偏差的贡献量级完全不同:
指标类型 对应参数 1天(24h)产生的理论时间偏差 物理意义 短期稳定性 阿伦方差 ( 每一秒都在发生的随机"抖动" 长期稳定性 频率老化 ( 随时间推移单向积累的"跑偏" 结论: 在短时间内(如秒级采样),阿伦方差决定的微小抖动是主导;但如果您让系统连续运行一天而不进行外部对时,老化(Aging) 产生的偏差将比阿伦方差积累的偏差大出 160 多倍。

1.5.5 压控晶振的最小频率刻度
阿仑方差(Allan Variance)决定了你细分频率的"物理意义"边界。 虽然 DAC 的位数决定了你"想"调多准,但阿仑方差决定了晶振"能"有多准。
阿仑方差衡量的是晶振的短期频率稳定性。可以把它理解为晶振频率在微观时间尺度上的"呼吸"幅度。
-
物理瓶颈 :如果计算出 24-bit DAC 的调节步进是
-
结果:这种细分是无效的。就像你试图在一把不断伸缩抖动的尺子上刻下微米级的刻度,刻度本身虽细,但尺子在晃,你永远无法通过这个刻度得到准确的读数。
虽然阿仑方差划定了上限,但在工程实现中,还需要参考以下两个参数:
A. 相位噪声(频域视角)
如果细分频率是为了做精密通信(如锁相环),那么近端相位噪声 ( 处)比阿仑方差更直接。
-
ZD578 在
-
工程陷阱 :如果为了细分频率而选用了一个高位数但高噪声 的 DAC,DAC 的输出纹波会直接恶化这个
B. 调频斜率()
正如之前讨论的,同样的 12-bit DAC,控制 ZD255(范围 0.6ppm)比控制 ZD048(范围 2ppm)要更"准"。
- 计算逻辑:范围越窄,单位电压引起的频率变化越小,细分就越容易。
2.电压调节频率的方法
2.1 晶振的特性
2.1.1极性
绝大多数压控晶体振荡器(VCXO/OCXO)遵循正极性控制逻辑:
-
-
虽然极少数特殊应用会定制负斜率,除非规格书另有说明,否则默认均为正斜率。
2.1.2. 中心电压与标称频率
在 0~5V 的调节范围内,厂家在生产校准时,通常是以中心电压 (通常是调节范围的一半,即 )为基准的。
-
当
-
调节电压偏离
2.1.3. 结合 ZD578 的实际指标换算
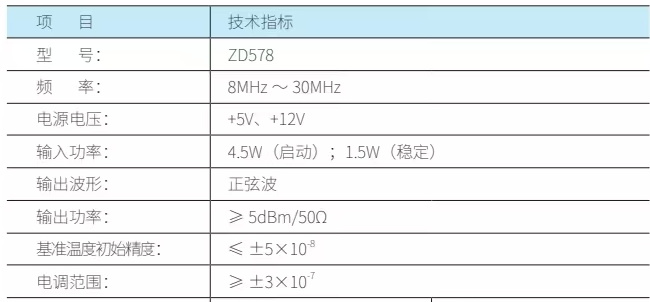
该型号的电调范围 为 (即
)。
若以 为例,其实际的频率调节映射大致如下:
-
-
-
2.1.4. 的作用
图中的引脚 1 (),它输出一个内部稳压后的参考电压。
-
如果你使用外部电源(如 LDO 输出的
-
推荐做法 :使用该晶振自带的
2.2 搭配DAC的位宽推导方法
推导 DAC 位宽的方法有两种:一种从需求目标 出发,另一种从硬件物理特性出发。
方法一:量化级数推导法 (基于目标分辨率)
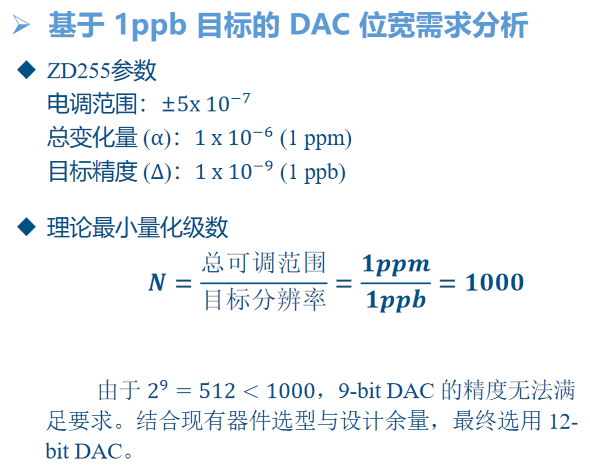
图片中所采用的方法,主要用于快速评估 DAC 是否满足最低系统指标。
(1). 推导逻辑
该方法将晶振的总电调范围(Tuning Range)看作一段总长度,将你期望达到的频率步进(如 1ppb)看作最小刻度,计算出覆盖这段长度最少需要多少个"台阶"。
-
计算公式:
- 量化级数:
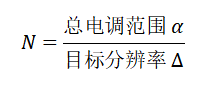
-
理论位宽 :
-
实际选型:
 (通常向上取整并预留余量)
(通常向上取整并预留余量)
(2). 前提条件
-
目标精度已确定: 必须明确系统对频率微调的最小分辨率要求(如
-
电调范围已知: 需从手册中确认晶振的总变化量(如 ZD255 为
-
线性假设: 默认晶振的频率随压控电压的变化是线性的。
-
**电压匹配:**默认晶振的可调电压和DAC输出电压一致。
(3).实例
核心参数:
-
总电调范围 (
-
压控电压 (
-
参考输出电压 (
-
设计目标 (
目的:决定至少买多少位的 DAC 芯片。
-
计算量化级数 (N):
-
理论位宽 (n):
-
工程决策:
由于
方法二:电压灵敏度映射法 (基于物理增益)
这种方法更偏向底层硬件设计,通过建立"电压"与"频率"的转换关系,计算出 DAC 的每一个 LSB 实际对应多少 Hz 的偏移。
(1). 推导逻辑
该方法先算出晶振的压控增益(),再结合 DAC 的单位步进电压,算出实际的调频精度。
计算步骤:
压控增益:  (单位:
(单位:) 。
DAC 步进电压: 。
实际频率精度: 。
(2). 前提条件
-
电压满量程匹配: 前提是 DAC 的输出满量程(由其参考电压
-
参考源稳定: DAC 的
-
阻抗匹配: 晶振的压控引脚(
(3)实例
目的:写 FPGA 控制代码时,算出增加 1 个数值,频率到底变了多少。
假设选用了 12-bit DAC ,并且参考电压直接使用晶振提供的。
-
第一步:计算压控灵敏度 (
-
第二步:计算 DAC 的电压步进 (
-
第三步:计算最终频率精度 (
结论 :使用 12-bit DAC 时,你调整 1 个数值,频率只会移动 。这个精度远优于设定的
目标,能够非常平滑地补偿由于 10 年老化 (
)带来的频率漂移 。
两种方法的综合对比表
| 维度 | 方法一:量化级数法 | 方法二:电压灵敏度法 |
|---|---|---|
| 视角 | 自顶向下(从算法目标看硬件) | 自底向上(从硬件限制看表现) |
| 主要用途 | 确定 DAC 位宽的选型下限。 | 用于软件算法编写,确定步进控制逻辑。 |
| 计算示例 (ZD255) | ||
| 结论 | 需要 |
每调 1 个数值,频率变化约 |
在应用上述实例时,有一个致命的硬件前提:DAC 的满量程必须与 范围对齐。
注意 ZD255 的特殊情况 : 如果你改用 ZD255 ,它的
错误做法 :直接用
正确做法 :需要加一级运放将 DAC 输出从
核心工程建议:
在实际的原理图设计中,即便计算出 10 位就够用,也建议无脑选用 12-bit 或 16-bit DAC。因为对于深空探测任务,多出的位数可以作为"校准余量",用来抵消 DAC 本身的积分非线性(INL)以及恶劣温差环境带来的电压温漂。
以上就是本次笔记的内容。