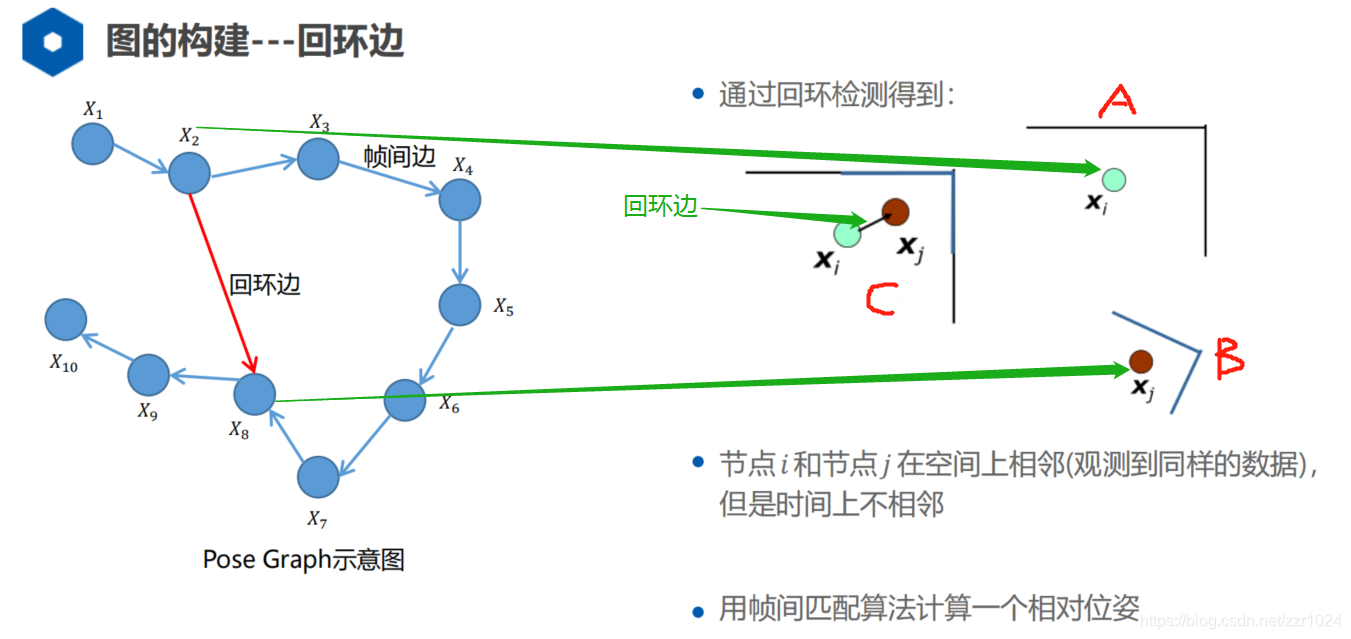
本节开始讲解四元数推导相对位姿残差跟雅克比的推导,四元数推导也存在多种形式,第一种是借用李群李代数来推导,第二种是直接利用四元素性质推导,第三种直接利用如之前PNP章节,将四元数展开来求解,本文主要介绍前两种,至于第三种再看时间而定,轴角跟欧拉角的推导,暂时就不推导了,本节也是相对位姿between factor理论讲解最后一章,接下来继续使用之前图来说明,先看借助李群李代数推导的过程
完整代码![]() https://gitee.com/zl_vslam/slam_optimizer/blob/master/3d_optimize/apps/main_ch12.cpp目前效果还比较一般,但本节方法已经再vins-mono中获得了证明,目前还不知道是什么原因导致结果未收敛,待后续继续更新吧,
https://gitee.com/zl_vslam/slam_optimizer/blob/master/3d_optimize/apps/main_ch12.cpp目前效果还比较一般,但本节方法已经再vins-mono中获得了证明,目前还不知道是什么原因导致结果未收敛,待后续继续更新吧,
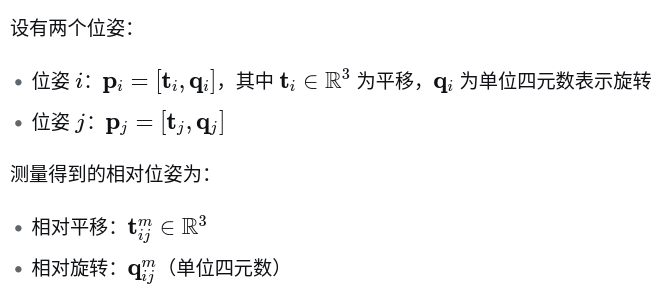
1. 问题定义
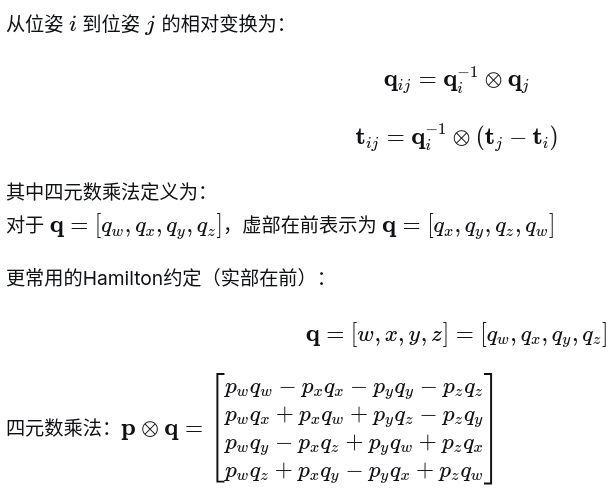
2. 相对位姿的计算
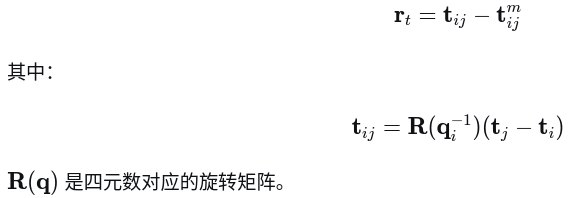
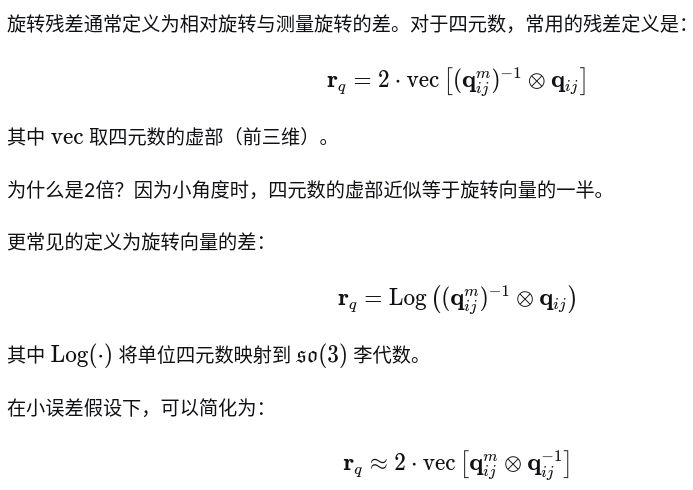
3. 残差定义
3.1 平移残差
3.2 旋转残差
4. 误差对位姿的雅可比
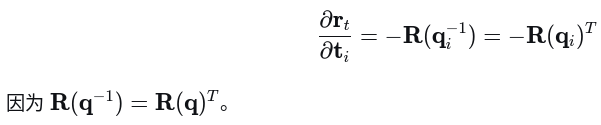
4.1 平移残差对 ti 的雅可比
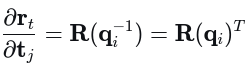
4.2 平移残差对 tj 的雅可比
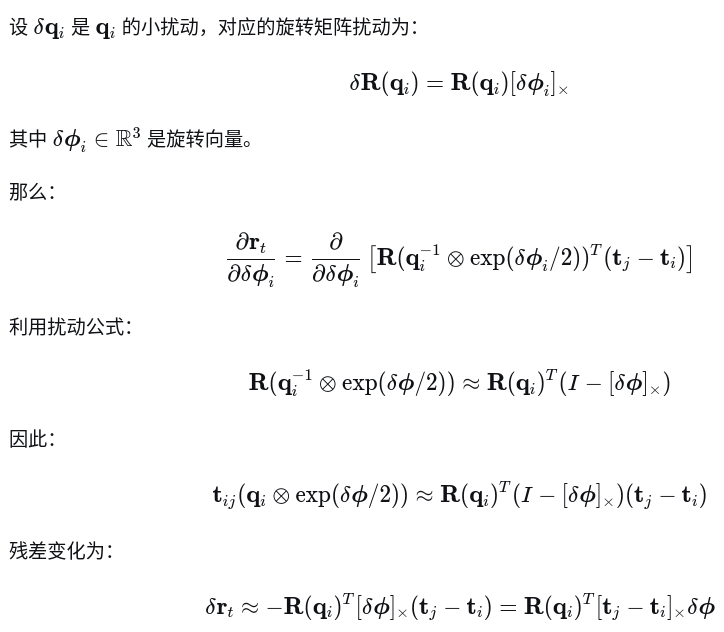
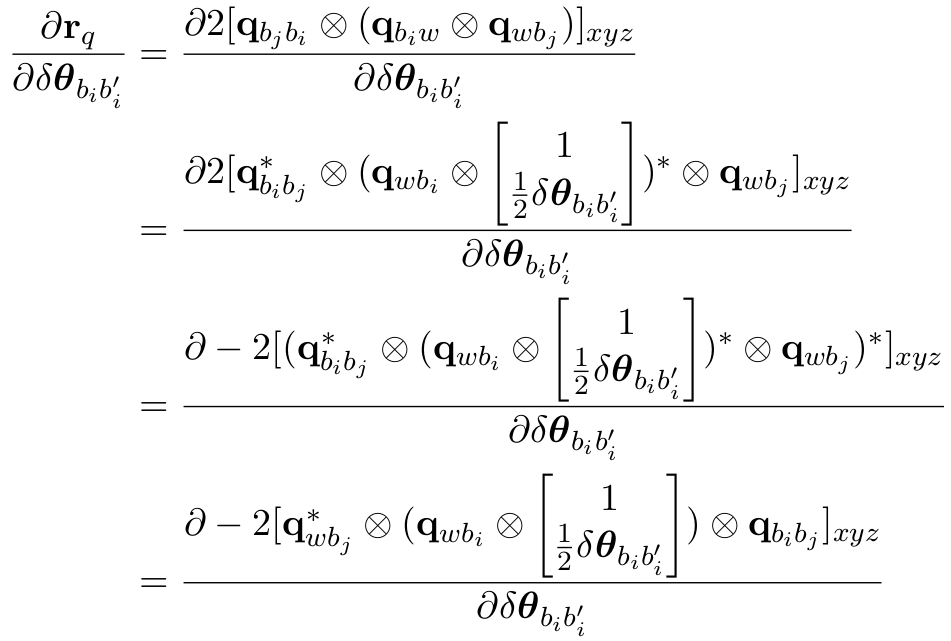
4.3 平移残差对 qi 的雅可比

4.4 平移残差对 qj 的雅可比


5. 旋转残差的雅可比
这里直接借用类似vins-mono中的残差跟雅克比,接下来看看对旋转如何求导

上述式子中第二行为残差项
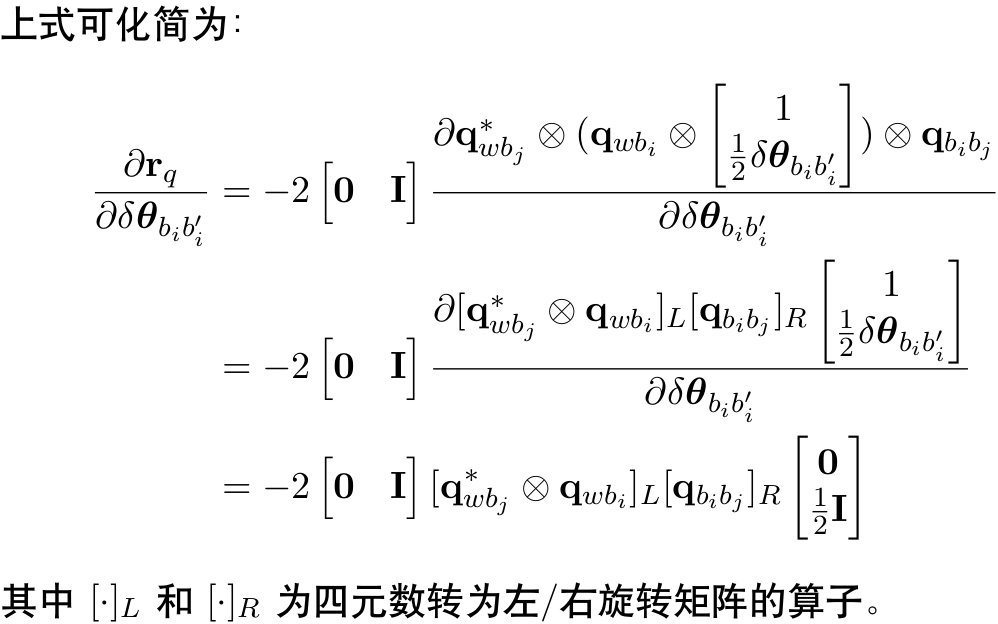
5.1 相对旋转对 qwi 的扰动
该雅克比对应的代码再vins-mono中能找到对应
Eigen::Quaterniond corrected_delta_q = pre_integration->delta_q * Utility::deltaQ(dq_dbg * (Bgi - pre_integration->linearized_bg));
jacobian_pose_i.block<3, 3>(O_R, O_R) = -(Utility::Qleft(Qj.inverse() * Qi) * Utility::Qright(corrected_delta_q)).bottomRightCorner<3, 3>();5.2 相对旋转对 qwj 的扰动
旋转残差的雅可比
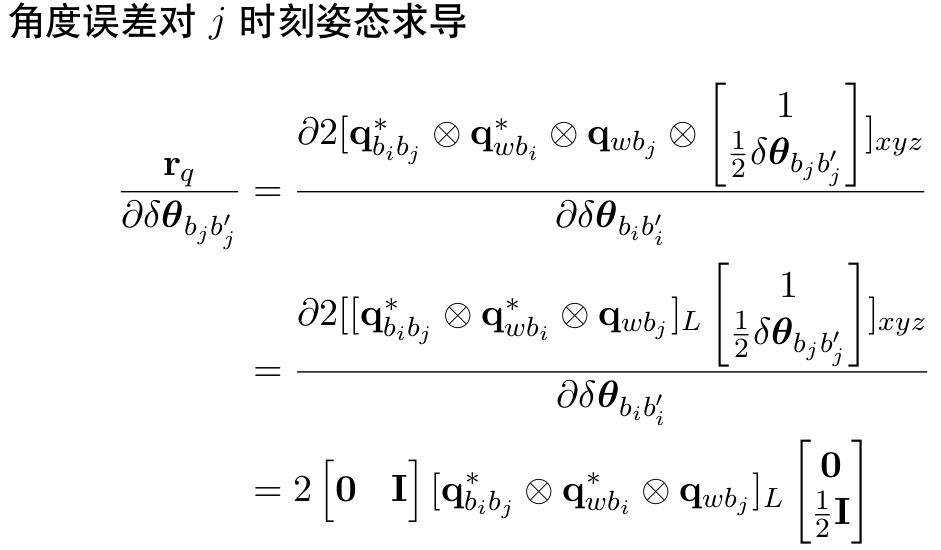
同样对应的代码如下
Eigen::Quaterniond corrected_delta_q = pre_integration->delta_q * Utility::deltaQ(dq_dbg * (Bgi - pre_integration->linearized_bg));
jacobian_pose_j.block<3, 3>(O_R, O_R) = Utility::Qleft(corrected_delta_q.inverse() * Qi.inverse() * Qj).bottomRightCorner<3, 3>();5.3 对局部参数的扰动
x_plus_delta = (q * delta_q).normalized();要求解的是对delta_q的雅克比,局部参数只跟虚部相关,实部不相关,因此
bool PoseLocalParameterization::Plus(const double *x, const double *delta, double *x_plus_delta) const
{
Eigen::Map<const Eigen::Vector3d> _p(x);
Eigen::Map<const Eigen::Quaterniond> _q(x + 3);
Eigen::Map<const Eigen::Vector3d> dp(delta);
Eigen::Quaterniond dq = Utility::deltaQ(Eigen::Map<const Eigen::Vector3d>(delta + 3));
Eigen::Map<Eigen::Vector3d> p(x_plus_delta);
Eigen::Map<Eigen::Quaterniond> q(x_plus_delta + 3);
p = _p + dp;
q = (_q * dq).normalized();
return true;
}
bool PoseLocalParameterization::ComputeJacobian(const double *x, double *jacobian) const
{
Eigen::Map<Eigen::Matrix<double, 7, 6, Eigen::RowMajor>> j(jacobian);
j.topRows<6>().setIdentity();
j.bottomRows<1>().setZero();
return true;
}