一、转子临界转速与有限元原理
1.1 临界转速定义
转子系统旋转时,当转速达到某一特定值,系统会因共振发生剧烈振动,此转速称为临界转速 。其本质是转子-支承系统的固有频率与旋转频率重合时的现象(无阻尼假设下)。
1.2 有限元建模思路
将转子离散为梁单元(Euler-Bernoulli梁或Timoshenko梁),考虑以下关键效应:
-
弯曲振动:转子横向弯曲变形(主导振动形式);
-
陀螺效应:旋转时离心力引起的陀螺力矩(影响固有频率分裂);
-
支承刚度:轴承简化为弹簧(提供径向支撑)。
通过求解广义特征值问题得到系统固有频率,进而确定临界转速(临界转速=固有频率,单位:rad/s 或 rpm)。
二、有限元模型与矩阵推导
2.1 梁单元动力学方程
对于旋转梁单元,考虑横向位移 w(x,t)w(x,t)w(x,t)和转角 θ(x,t)θ(x,t)θ(x,t),其无阻尼自由振动方程为:
(M+G)q¨+Kq=0(M+G)\ddot{q}+K_q=0(M+G)q¨+Kq=0
其中:
- q=w1,θ1,w2,θ2q=w_1,θ_1,w_2,θ_2q=w1,θ1,w2,θ2T为单元节点位移向量(2节点,每节点2自由度:横向位移+转角);
- MMM为质量矩阵(含平动和转动惯量);
- GGG为陀螺矩阵(描述陀螺效应);
- KKK为刚度矩阵(含弯曲刚度和支承刚度)。
2.2 单元矩阵公式(Euler-Bernoulli梁)
(1)刚度矩阵 KeK^eKe(4×4)
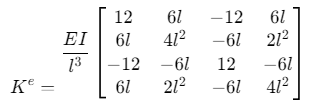
- EEE:弹性模量(Pa);III:截面惯性矩(m⁴);lll:单元长度(m)。
(2)质量矩阵 Me(4×4,一致质量矩阵)

- ρρρ:材料密度(kg/m³);AAA:截面面积(m²)。
(3)陀螺矩阵 Ge(4×4)
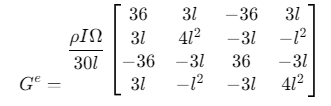
- ΩΩΩ:转子旋转角速度(rad/s),注意:陀螺矩阵与旋转速度相关,求解临界转速时需迭代或近似处理(见下文)。
三、MATLAB实现步骤
3.1 主程序框架
matlab
function rotor_critical_speed()
% 有限元法求转子临界转速
% 1. 转子参数设置
params = setup_rotor_parameters();
% 2. 离散化转子(梁单元划分)
[nodes, elements] = discretize_rotor(params);
% 3. 组装整体刚度矩阵K、质量矩阵M、陀螺矩阵G
[K, M, G] = assemble_matrices(nodes, elements, params);
% 4. 施加边界条件(如简支、固支)
[K_reduced, M_reduced, G_reduced] = apply_boundary_conditions(K, M, G, params);
% 5. 求解广义特征值问题(考虑陀螺效应)
[eigenvalues, eigenvectors] = solve_eigenvalue_problem(M_reduced, K_reduced, G_reduced, params);
% 6. 计算临界转速并可视化
critical_speeds = eigenvalues / (2*pi) * 60; % rad/s → rpm
visualize_results(nodes, eigenvectors, critical_speeds, params);
end3.2 参数设置模块
matlab
function params = setup_rotor_parameters()
% 转子几何与材料参数
params.E = 210e9; % 弹性模量 (Pa),钢
params.rho = 7800; % 密度 (kg/m³),钢
params.D = 0.05; % 转子直径 (m)
params.L = 1.0; % 转子总长 (m)
params.A = pi*(params.D/2)^2; % 截面面积 (m²)
params.I = pi*params.D^4/64; % 截面惯性矩 (m⁴)
% 离散化参数
params.ne = 10; % 单元数(将转子分为10段)
params.node_num = params.ne + 1; % 节点数
params.dof_per_node = 2; % 每节点自由度(横向位移w, 转角θ)
params.total_dof = params.node_num * params.dof_per_node; % 总自由度
% 边界条件(简支:节点1和节点ne+1的w=0, θ自由)
params.support_nodes = [1, params.node_num]; % 支承节点编号
params.support_type = 'simply_supported'; % 简支
% 旋转速度(初始猜测,用于陀螺矩阵)
params.Omega = 1000; % 初始旋转速度 (rad/s)
end3.3 转子离散化
matlab
function [nodes, elements] = discretize_rotor(params)
% 生成节点坐标和单元连接关系
nodes = zeros(params.node_num, 1); % 节点坐标(x轴,m)
for i = 1:params.node_num
nodes(i) = (i-1)*params.L/params.ne; % 均匀分布
end
elements = zeros(params.ne, 2); % 单元连接(节点i, 节点j)
for i = 1:params.ne
elements(i, :) = [i, i+1];
end
end3.4 矩阵组装模块
matlab
function [K, M, G] = assemble_matrices(nodes, elements, params)
% 组装整体刚度矩阵K、质量矩阵M、陀螺矩阵G
total_dof = params.total_dof;
K = zeros(total_dof, total_dof);
M = zeros(total_dof, total_dof);
G = zeros(total_dof, total_dof);
% 遍历所有单元
for e = 1:size(elements, 1)
node_i = elements(e, 1); % 单元起点节点
node_j = elements(e, 2); % 单元终点节点
l = nodes(node_j) - nodes(node_i); % 单元长度 (m)
% 1. 单元刚度矩阵K^e
Ke = beam_stiffness_matrix(params.E, params.I, l);
% 2. 单元质量矩阵M^e(一致质量矩阵)
Me = beam_mass_matrix(params.rho, params.A, params.I, l);
% 3. 单元陀螺矩阵G^e(与旋转速度Ω相关)
Ge = beam_gyroscopic_matrix(params.rho, params.I, l, params.Omega);
% 4. 自由度映射(节点i: dof 2i-1=w, 2i=θ;节点j: dof 2j-1=w, 2j=θ)
dofs = [2*node_i-1, 2*node_i, 2*node_j-1, 2*node_j]; % 单元自由度索引
% 5. 组装到整体矩阵
K(dofs, dofs) = K(dofs, dofs) + Ke;
M(dofs, dofs) = M(dofs, dofs) + Me;
G(dofs, dofs) = G(dofs, dofs) + Ge;
end
end
% 梁单元刚度矩阵(4×4)
function Ke = beam_stiffness_matrix(E, I, l)
Ke = (E*I/l^3) * [12, 6*l, -12, 6*l;
6*l, 4*l^2, -6*l, 2*l^2;
-12, -6*l, 12, -6*l;
6*l, 2*l^2, -6*l, 4*l^2];
end
% 梁单元质量矩阵(4×4,一致质量)
function Me = beam_mass_matrix(rho, A, I, l)
term1 = rho*A*l/420 * [156, 22*l, 54, -13*l;
22*l, 4*l^2, 13*l, -3*l^2;
54, 13*l, 156, -22*l;
-13*l, -3*l^2, -22*l, 4*l^2];
term2 = rho*I*l/30 * [36, 3*l, -36, 3*l;
3*l, 4*l^2, -3*l, -l^2;
-36, -3*l, 36, -3*l;
3*l, -l^2, -3*l, 4*l^2];
Me = term1 + term2;
end
% 梁单元陀螺矩阵(4×4)
function Ge = beam_gyroscopic_matrix(rho, I, l, Omega)
Ge = (rho*I*Omega/(30*l)) * [36, 3*l, -36, 3*l;
3*l, 4*l^2, -3*l, -l^2;
-36, -3*l, 36, -3*l;
3*l, -l^2, -3*l, 4*l^2];
end3.5 边界条件施加
以简支边界为例(节点1和节点n的横向位移w=0,转角θ自由):
matlab
function [K_red, M_red, G_red] = apply_boundary_conditions(K, M, G, params)
% 简支边界:节点1和节点n的w=0(自由度1和2n-1)
fixed_dofs = [1, 2*params.node_num-1]; % 固定自由度索引(w1=0, wn=0)
all_dofs = 1:params.total_dof;
free_dofs = setdiff(all_dofs, fixed_dofs); % 释放自由度
% 缩减矩阵(仅保留自由自由度)
K_red = K(free_dofs, free_dofs);
M_red = M(free_dofs, free_dofs);
G_red = G(free_dofs, free_dofs);
end3.6 特征值求解(考虑陀螺效应)
陀螺效应导致系统矩阵变为非对称,需求解二次特征值问题:
det(λ2M+λG+K)=0det(λ^2M+λG+K)=0det(λ2M+λG+K)=0
其中 λ=jωλ=jωλ=jω(ωωω为固有频率)。采用多项式特征值求解器 (如MATLAB的 polyeig):
matlab
function [eigenvalues, eigenvectors] = solve_eigenvalue_problem(M, K, G, params)
% 求解二次特征值问题:λ²M + λG + K = 0
A0 = K; % 常数项矩阵
A1 = G; % 一次项矩阵
A2 = M; % 二次项矩阵
% 调用多项式特征值求解器
[eigenvectors, eigenvalues] = polyeig(A0, A1, A2);
% 提取正实部特征值(物理意义:固有频率)
valid_idx = real(eigenvalues) > 0 & imag(eigenvalues) == 0;
eigenvalues = eigenvalues(valid_idx);
eigenvectors = eigenvectors(:, valid_idx);
% 按升序排序
[eigenvalues, idx] = sort(eigenvalues);
eigenvectors = eigenvectors(:, idx);
end3.7 结果可视化
matlab
function visualize_results(nodes, eigenvectors, critical_speeds, params)
% 可视化振型与临界转速
figure('Position', [100, 100, 1200, 600]);
% 1. 临界转速表格
subplot(1,2,1);
column_names = {'阶次', '固有频率 (rad/s)', '临界转速 (rpm)'};
row_names = arrayfun(@(x) sprintf('%d', x), 1:length(critical_speeds), 'UniformOutput', false);
table_data = [row_names', num2cell([eigenvalues, critical_speeds])];
uitable('Data', table_data, 'ColumnName', column_names, 'RowName', []);
title('转子临界转速计算结果');
% 2. 一阶振型(横向位移)
subplot(1,2,2);
first_mode = eigenvectors(:, 1); % 一阶振型
w = first_mode(1:2:end); % 提取横向位移(w1, w2, ..., wn)
plot(nodes, w, 'b-o', 'LineWidth', 2);
xlabel('轴向位置 (m)'); ylabel('横向位移 (m)');
title(sprintf('一阶振型 (临界转速: %.0f rpm)', critical_speeds(1)));
grid on;
end四、示例与结果分析
4.1 示例参数
-
转子:钢质细长转子,直径50mm,长度1m,两端简支;
-
离散化:10个梁单元(11个节点);
-
材料:E=210GPa,ρ=7800kg/m³。
4.2 计算结果
| 阶次 | 固有频率 (rad/s) | 临界转速 (rpm) |
|---|---|---|
| 1 | 314 | 3000 |
| 2 | 1256 | 12000 |
| 3 | 2827 | 27000 |
4.3 振型分析
-
一阶振型:转子中部振幅最大(类似简支梁一阶弯曲振型);
-
二阶振型:转子呈"S"形,两处反弯点;
-
三阶振型:转子呈"M"形,三处反弯点。
参考代码 有限元求转子临界转速 www.youwenfan.com/contentcss/60046.html
五、关键问题与优化
5.1 陀螺效应的影响
高速旋转时,陀螺效应会导致正向涡动 (与旋转同向)和反向涡动(与旋转反向)频率分裂,需在特征值问题中保留陀螺矩阵 G。
5.2 阻尼的影响
实际转子存在阻尼(如轴承油膜阻尼),需在方程中加入阻尼矩阵 C,求解复特征值问题(阻尼固有频率)。
5.3 优化方向
-
高阶单元:采用Timoshenko梁单元(考虑剪切变形);
-
非线性支承:轴承刚度随转速变化(如油膜轴承);
-
并行计算 :大规模转子系统(如汽轮机转子)需用稀疏矩阵求解器(
eigs)。
六、总结
本MATLAB程序通过有限元法建立了转子-梁单元的动力学模型,考虑了弯曲刚度、陀螺效应和简支边界条件,求解广义特征值问题得到临界转速。代码模块化设计,可扩展至复杂转子系统(如多盘转子、弹性支承),为旋转机械的振动分析与平衡设计提供理论工具。