这个是我之前做的一个项目,现在总结一下
一、问题本质
已知:
一个点:P = (x, y, z)
一个法向量:n = (nx, ny, nz)
求:
cpp
刚体变换矩阵 T(4×4):
[ R t ]
[ 0 1 ]
一个 X YZ +法向量 如何转换成一个旋转平移矩阵二、核心思想
约束:
- z轴 = 法向量
- x/y轴 = 在平面上的两个正交方向
这就是一个 SO(3) 构造问题
其中:
- z = 法向
- x = 任意垂直于 z 的方向
- y = 保证右手系
本质:从一个方向 → 补全成一个正交坐标系
cpp
ẑ = n / ||n||三、PCL使用和Matlab
PCL
cpp
#include <Eigen/Dense>
Eigen::Matrix4f poseFromPointNormal(
const Eigen::Vector3f& point,
const Eigen::Vector3f& normal)
{
Eigen::Vector3f z = normal.normalized();
// 选择辅助向量(避免共线)
Eigen::Vector3f aux(0, 0, 1);
if (fabs(z.dot(aux)) > 0.9)
aux = Eigen::Vector3f(1, 0, 0);
// 构造正交基
Eigen::Vector3f x = aux.cross(z).normalized();
Eigen::Vector3f y = z.cross(x);
// 旋转矩阵
Eigen::Matrix3f R;
R.col(0) = x;
R.col(1) = y;
R.col(2) = z;
// 变换矩阵
Eigen::Matrix4f T = Eigen::Matrix4f::Identity();
T.block<3,3>(0,0) = R;
T.block<3,1>(0,3) = point;
return T;
}使用
cpp
pcl::PointNormal pt;
Eigen::Vector3f P(pt.x, pt.y, pt.z);
Eigen::Vector3f n(pt.normal_x, pt.normal_y, pt.normal_z);
Eigen::Matrix4f T = poseFromPointNormal(P, n);注意点1、法向量方向不稳定
n 和 -n 都是合法法向
会导致:
- 姿态翻转
- 抓取方向反了
解决:
cpp
if (n.dot(view_direction) > 0)
n = -n;注意点12、自由度缺失(核心理解)
一个法向量:
只确定2个自由度
还缺:
绕法向旋转
你现在的 x 轴:
是"人为选的"
注意点13、工业更稳定的写法 ⭐
如果你有参考方向(推荐):
比如:
重力方向 g = (0,0,1)
更优写法:
cpp
Eigen::Vector3f z = normal.normalized();
Eigen::Vector3f x = g.cross(z).normalized();
Eigen::Vector3f y = z.cross(x);好处:
姿态稳定(不会随机旋转)
Matlab
cpp
clc; clear; close all;
% 原始点云(模拟一个斜平面)
[X,Y] = meshgrid(-1:0.2:1, -1:0.2:1);
Z = X + Y; % 平面 z = x + y
pts = [X(:), Y(:), Z(:)];
% 给定点和法向
P = [1,2,3];
n = [1,1,1];
n = n / norm(n);
% 构造坐标系
z = n;
if abs(dot(z,[0 0 1])) < 0.9
a = [0 0 1];
else
a = [1 0 0];
end
x = cross(a, z);
x = x / norm(x);
y = cross(z, x);
R = [x(:), y(:), z(:)];
% 构造T
T = eye(4);
T(1:3,1:3) = R;
T(1:3,4) = P(:);
% 变换点云(展平)
pts_h = [pts, ones(size(pts,1),1)]';
pts_trans = inv(T) * pts_h;
pts_trans = pts_trans(1:3,:)';
% 可视化
figure;
subplot(1,2,1);
scatter3(pts(:,1), pts(:,2), pts(:,3), '.');
title('原始点云');
axis equal;
subplot(1,2,2);
scatter3(pts_trans(:,1), pts_trans(:,2), pts_trans(:,3), '.');
title('变换后(平面被拉平)');
axis equal;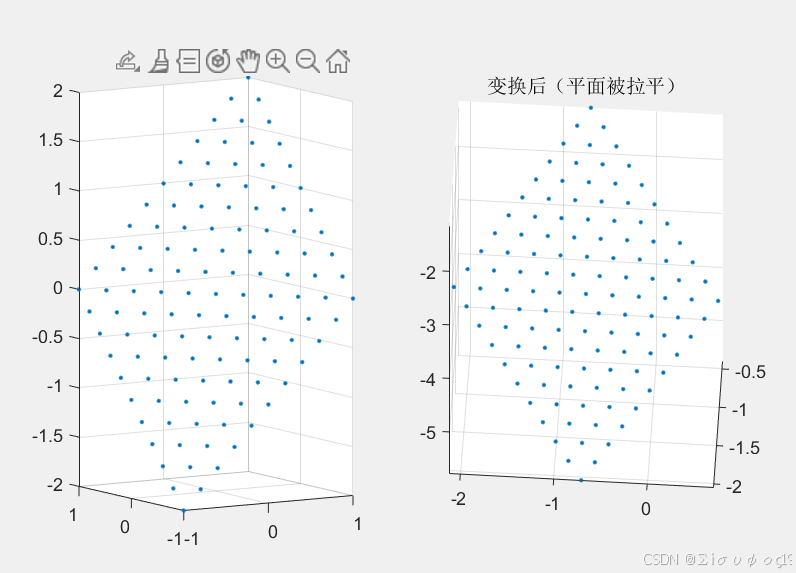
使用
平面矫正
法向 → 构造坐标系 → 变换点云 → 展平
抓取姿态(机器人)
z轴 = 法向(接触方向)
x轴 = 抓取方向
点云对齐初始化
局部坐标系 → ICP 初值
四、案例:
cpp
假设你有一个平面上的点:P = (1, 2, 3)
法向量:n = (0.577, 0.577, 0.577) // ≈ (1,1,1) 归一化
目标:
构造一个坐标系:
z轴 = 法向
并把这个平面"摆正"(对齐到XY平面)1、构建正交基
cpp
1、 z轴
z = n = (0.577, 0.577, 0.577)
2、选辅助向量
a = (0, 0, 1)(不共线)
3、 x轴
叉乘:
x = a × z
= (0,0,1) × (0.577,0.577,0.577)
= (-0.577, 0.577, 0)
归一化:
x ≈ (-0.707, 0.707, 0)
4、 y轴
y = z × x
计算:
y ≈ (-0.408, -0.408, 0.816)
5、 旋转矩阵
R =
[ -0.707 -0.408 0.577
0.707 -0.408 0.577
0 0.816 0.577 ]
(列向量:x y z)2、构造变换矩阵
cpp
T =
[ R P ]
[ 0 1 ]
T =
[ -0.707 -0.408 0.577 1
0.707 -0.408 0.577 2
0 0.816 0.577 3
0 0 0 1 ]