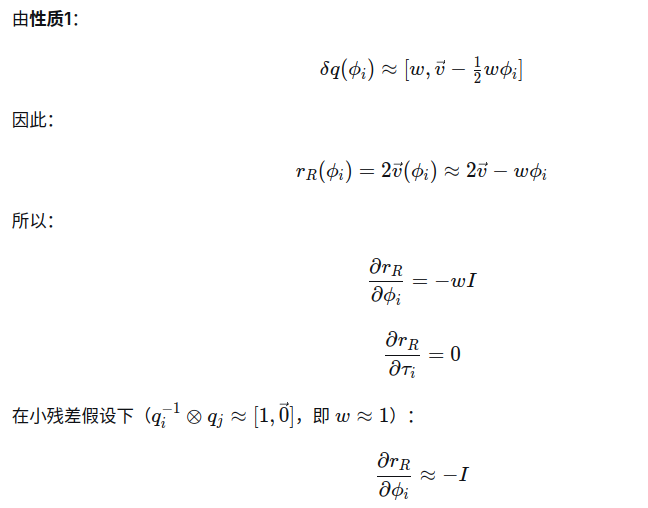
本节开始展示四元数用以推导绝对位姿雅克比,这也将是绝对位姿理论部分的最后一节,理论后必接实战篇,让我们进入四元数推导的世界吧
完整版实现了在6.1 补充里的公式
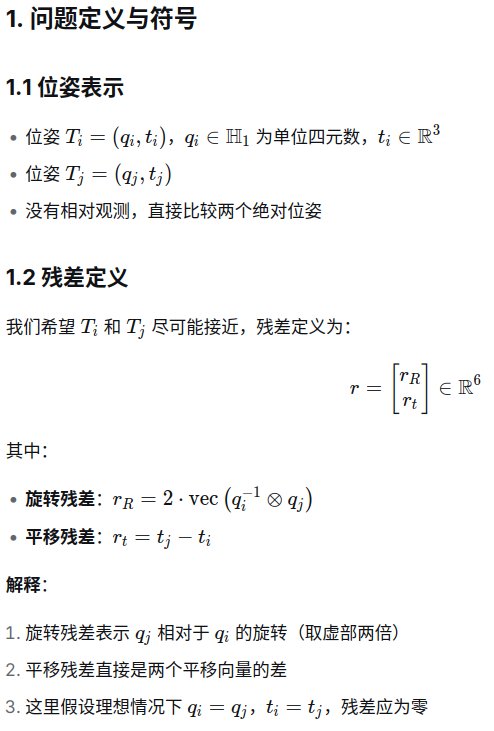
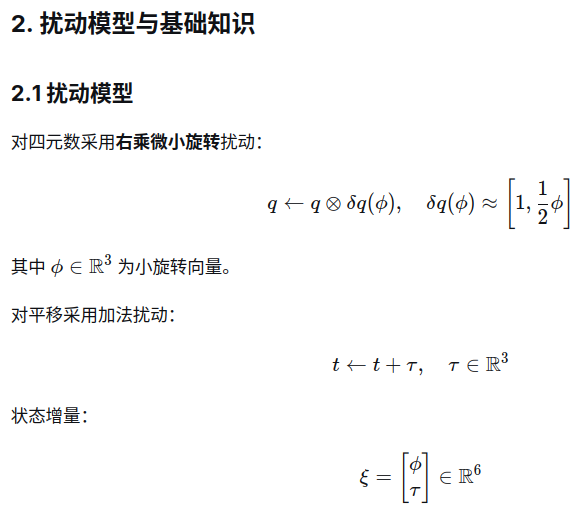
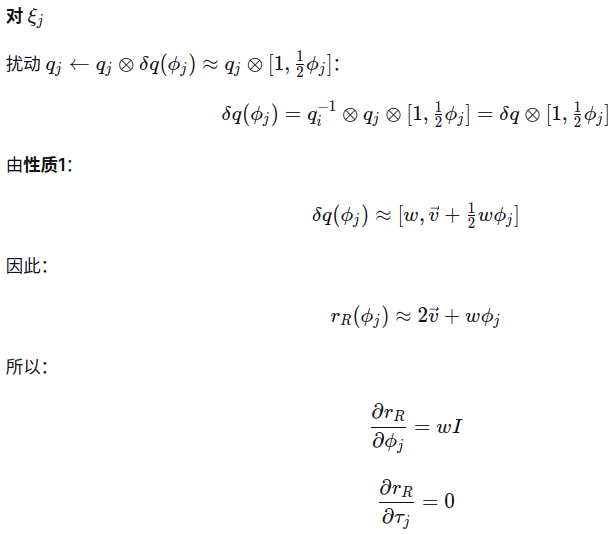
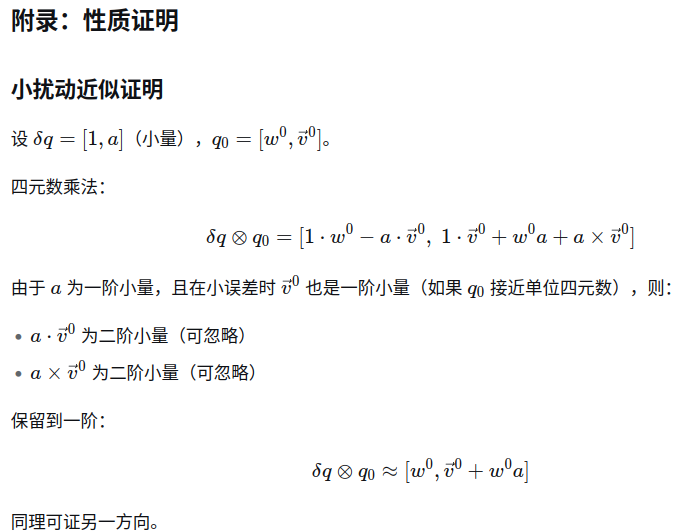
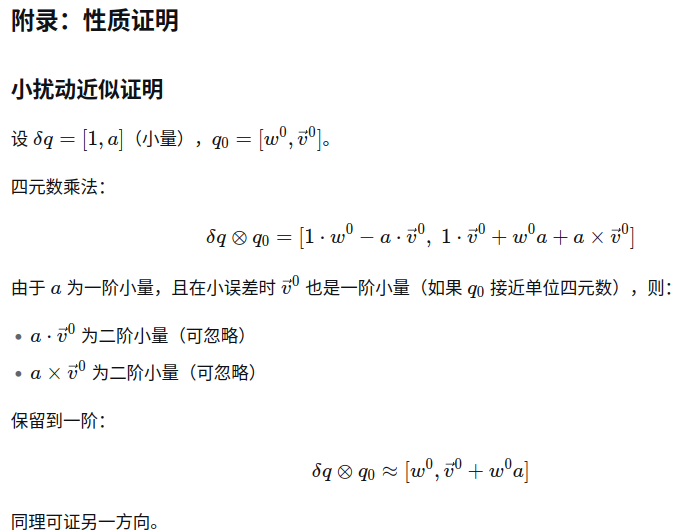
注意这里的小旋转四元数可以参考《Quaternion Kinematics for Error-State Kalman Filter》式(193)的定义,表示符号略有差异
6. 代码实战证明
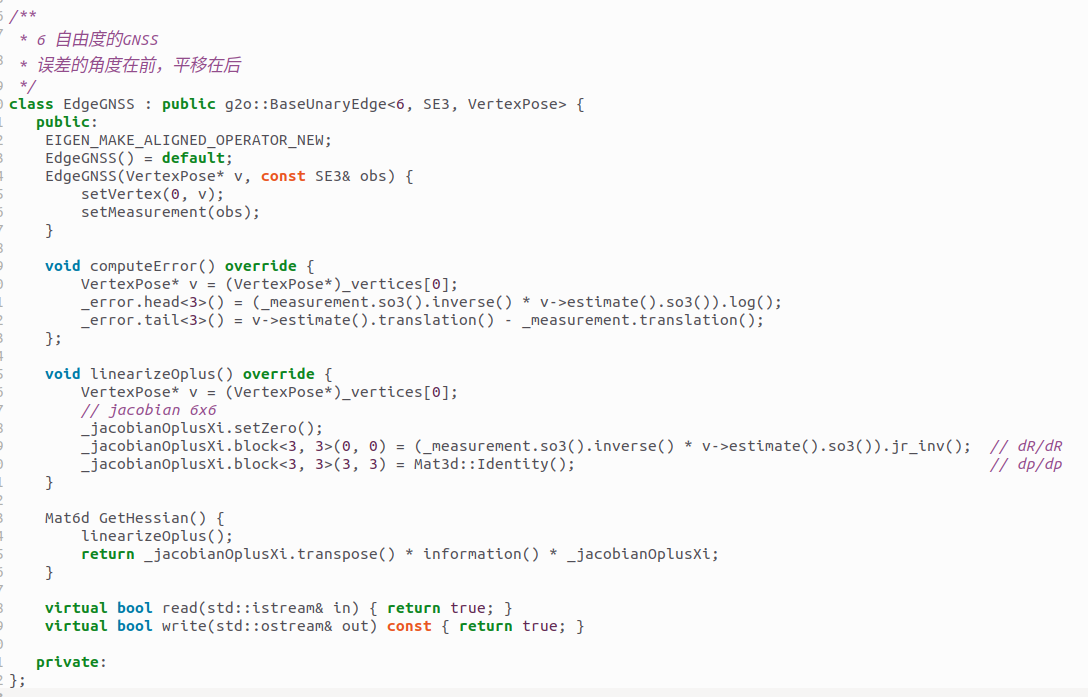
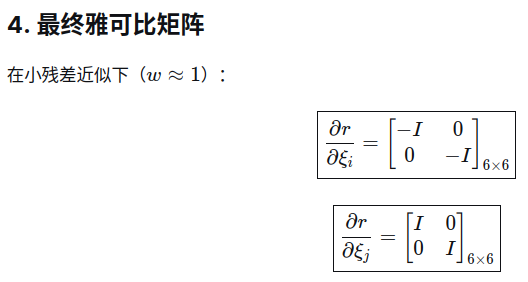
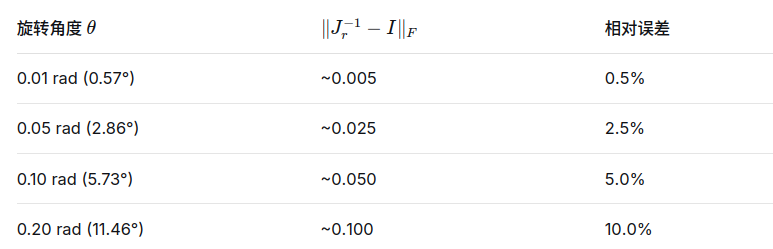
如图所示,可以看到雅克比为一个6x6的矩阵,其中右下角的3x3为单位矩阵,左上角为右雅克比的逆,之前多个章节都有过右雅克比矩阵的逆,再小角度残差作用下,近似为单位阵,因此上述推导中近似的单位矩阵是完全正确的,也从侧面说明了雅克比矩阵推导的正确性
6.1 补充
待使用的公式

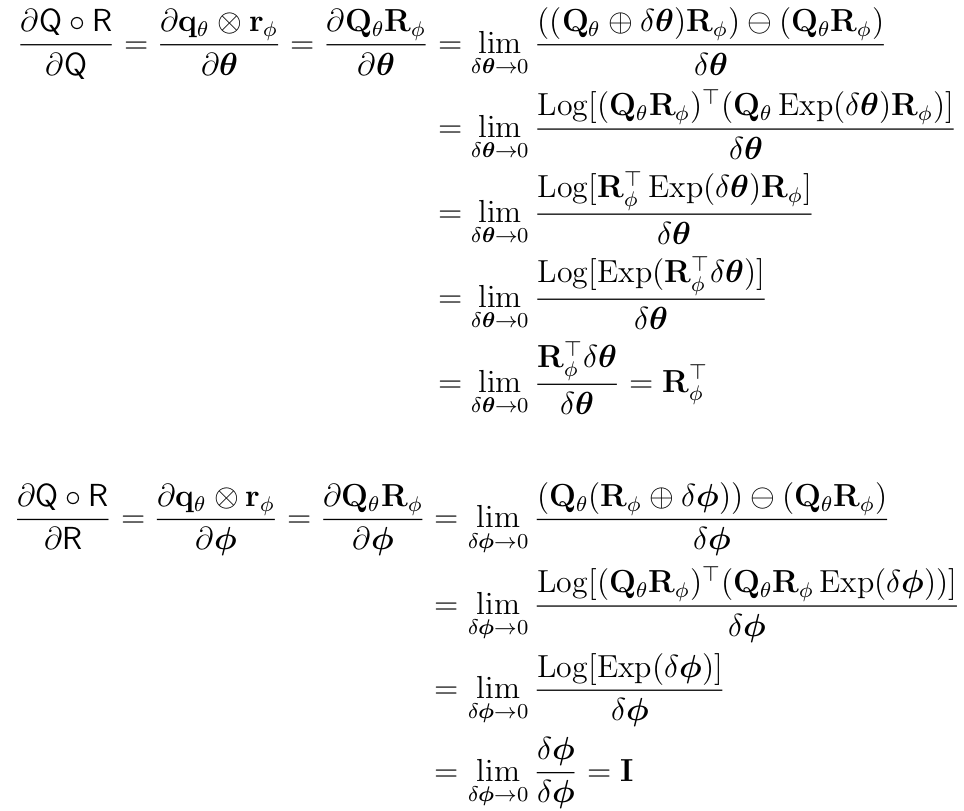
证明,两个四元素的雅克比如下
代码已经过验证
gtsam::Vector GPSPoseFactor::evaluateError(const gtsam::Pose3 &pose,
boost::optional<gtsam::Matrix &> Jacobian) const
{
gtsam::Pose3 delta_pose = measurement_.inverse()*pose;
gtsam::Vector6 error = delta_pose.Logmap(delta_pose, Jacobian);
if(Jacobian) {
gtsam::Matrix6 jac;
jac << gtsam::I_3x3, gtsam::Z_3x3, gtsam::Z_3x3, gtsam::I_3x3; // right
*Jacobian = jac;
}
return error;
}完整版实现 https://gitee.com/zl_vslam/slam_optimizer/blob/master/multi_sensor_slam/src/imu_factor_gtsam/gps_factor.cc
https://gitee.com/zl_vslam/slam_optimizer/blob/master/multi_sensor_slam/src/imu_factor_gtsam/gps_factor.cc
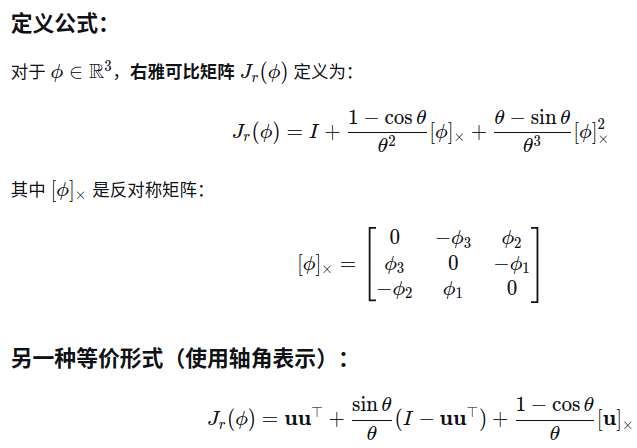
7. 右雅可比矩阵
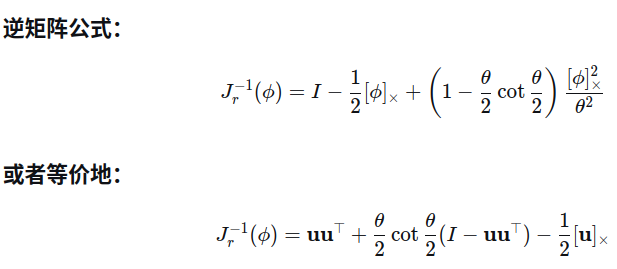
8. 右雅可比的逆
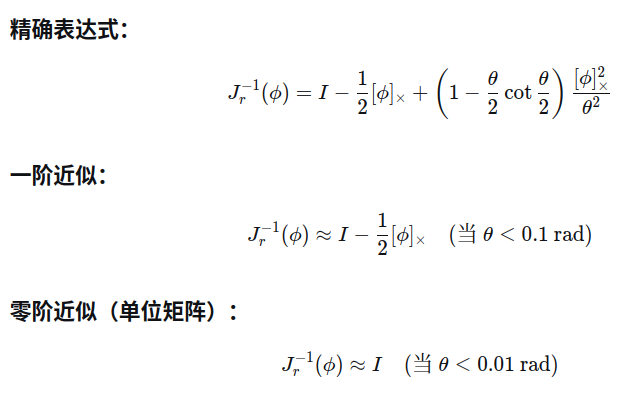
9. 小角度近似推导
9.1 小角度假设
9.2 对右雅克比矩阵的展开
9.3 对右雅克比矩阵的逆进行小角度展开
9.4 零阶近似
10. 近似误差分析
10.1 一阶近似的误差
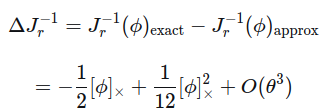
10.2 零阶近似(单位矩阵)的误差

10.3 误差量级估计
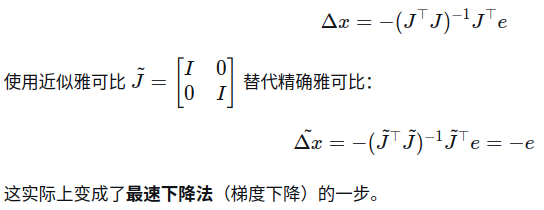
11. 在优化问题中的影响
高斯-牛顿法中的更新公式:
12. 结论公式