1.模型简介(微♥:电击小子程高兴的MATLAB小屋获取模型)
本仿真模型基于MATLAB/Simulink(版本MATLAB 2012Rb)软件。建议采用matlab2012Rb及以上版本打开。(若需要其他版本可联系代为转换)
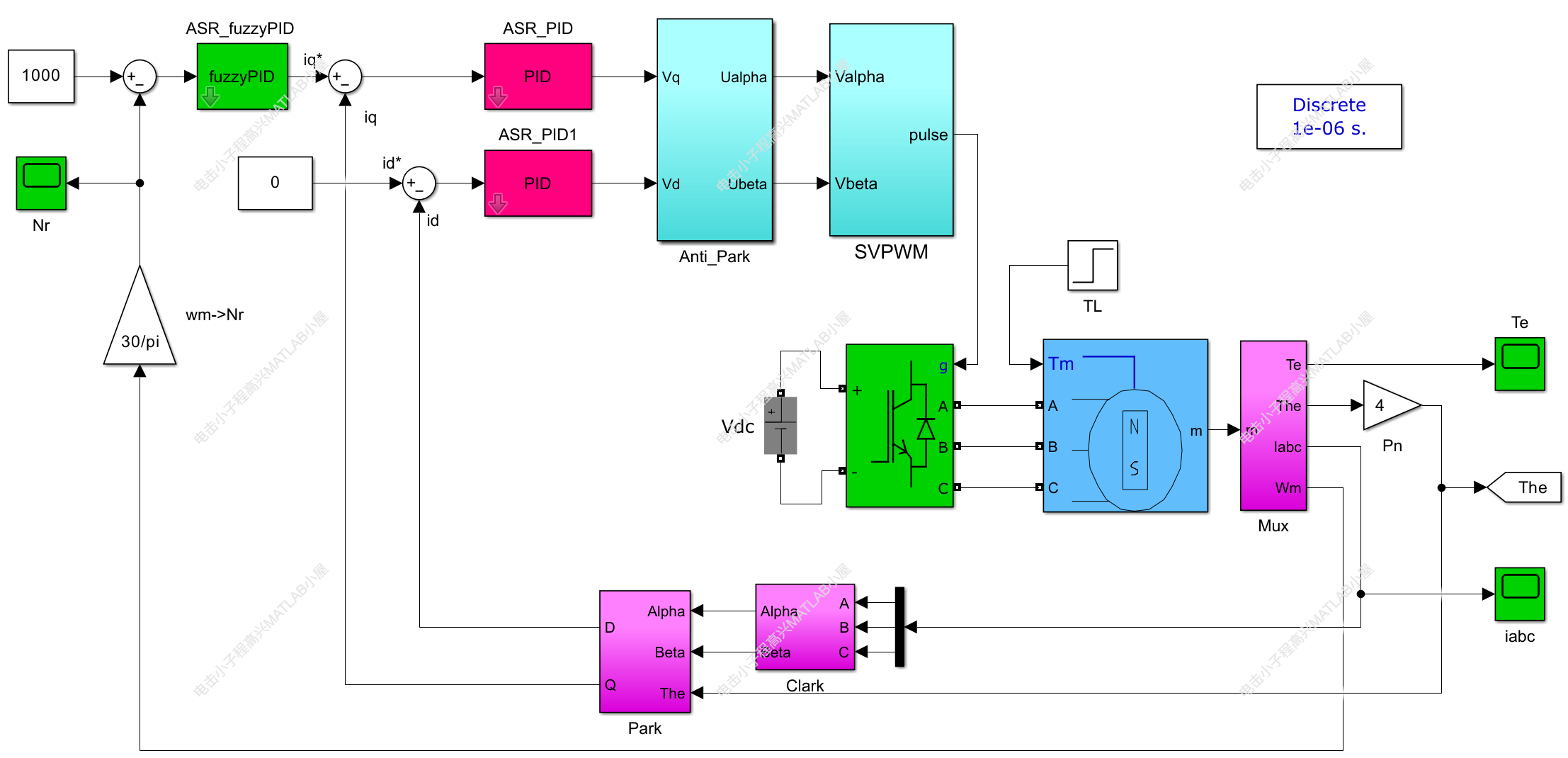
永磁同步电机模糊PID矢量控制仿真,包含仿真模型和详细设计报告,详细分析了模糊PID控制系统simulink 搭建的方法,并对波形进行分析。
2. 仿真模型如下:
3.仿真结果:
为了能够对比不同的电机调速系统中,说明本文提出的模糊PID控制系统有更好的驱动效果,在matlab/simulink中建立了Fuzzy-Control PID控制系统,设置PMSM的额定参数为:电机电阻R=0.96,电机转动惯量J=0.0003 kg:m2,电机极对数Pn=4。仿真时间设定为0.4 s,电机的额定转速为1000r/s,系统初始启动时的负载转矩为0,在0.2s时为8Nm,实验结果如图所示。
1.转速波形:
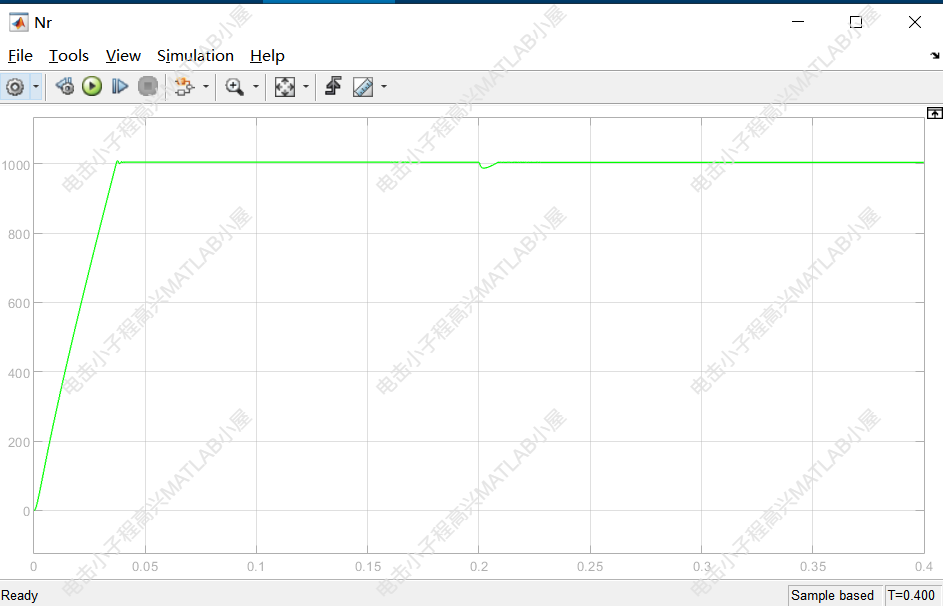
转速在约0.03s时达到稳定,无超调,达到稳定后可以看到转速响应曲线无波动,稳定性较高。电机加速阶段,起始电流较大。带转速稳定后,电流处于稳定状态。在t=0.2 s 时突加负载转矩TL= 8Nm ,电机也能快速恢复到给定参考转速值,从而说明所设计的调节器参数具有较好的动态性能和抗扰动能力。
2.转矩波形:
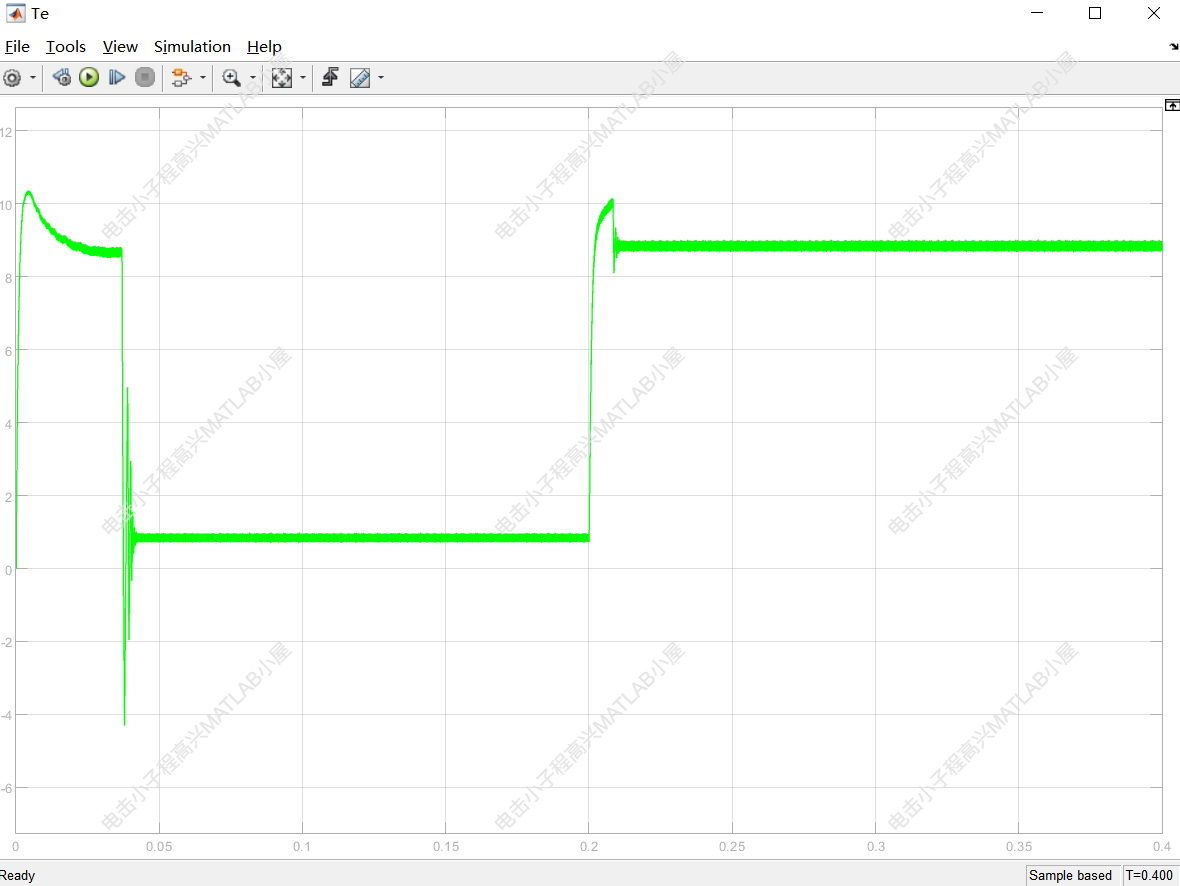
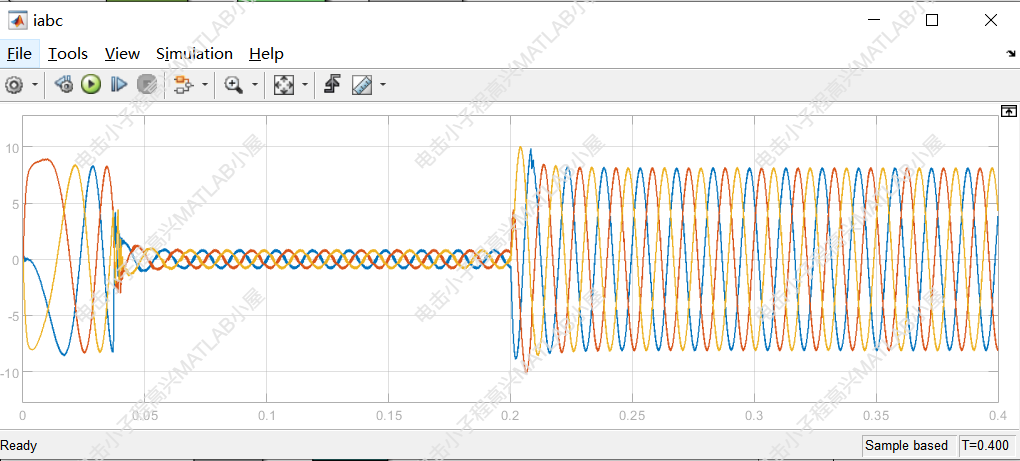
3.三相电流波形:
4.dq轴电流波形
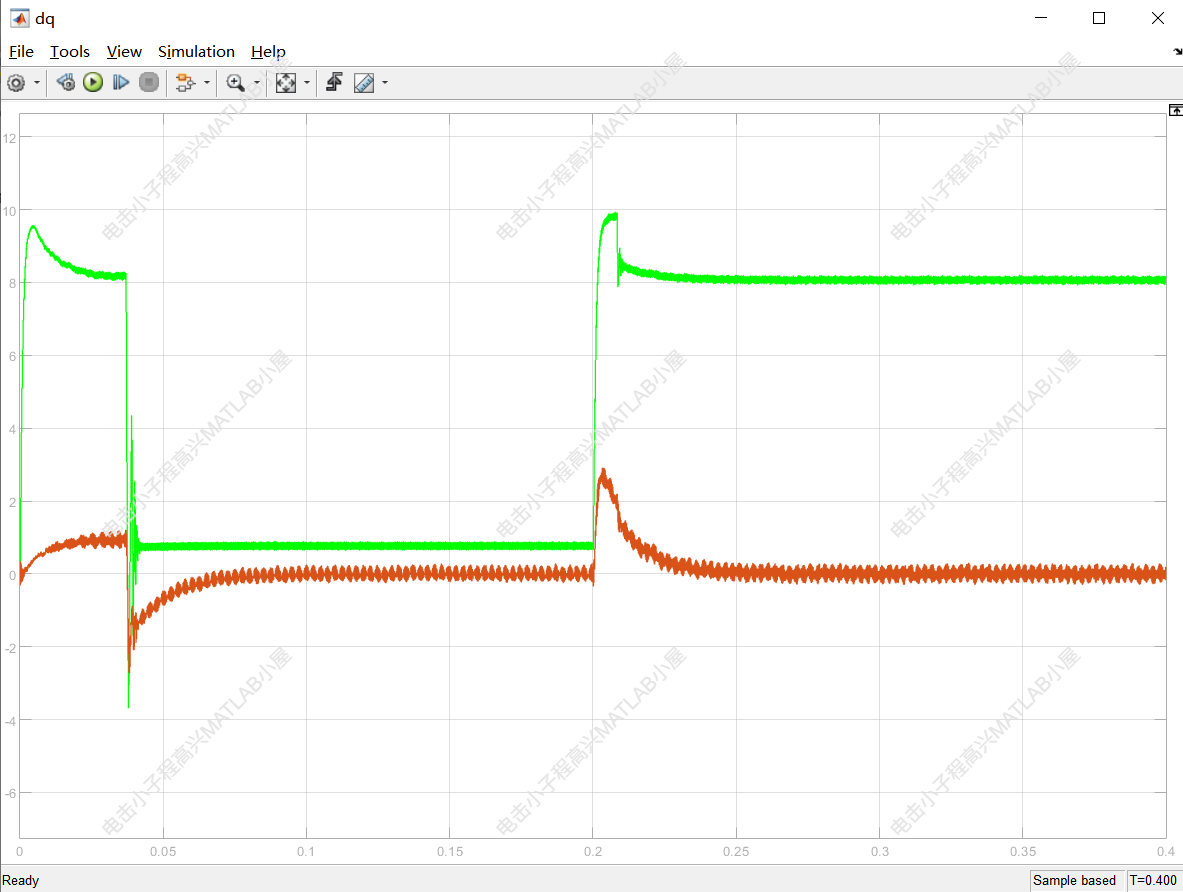
从以上仿真结果可以看出,当电机从零速上升到参考转速l000 r / min 时,几乎没有超调量,但仍然具有较快的动态响应速度. 并且在t=0.2 s 时突加负载转矩TL= 8Nm ,电机也能快速恢复到给定参考转速值,从而说明所设计的调节器参数具有较好的动态性能和抗扰动能力,能够满足实际电机控制性能的需要。
模糊PID控制系统在仿真时间约0.03s时达到稳定,无超调,达到稳定后可以看到转速响应曲线无波动,稳定性较高。综上可得到结论,模糊PID较常规的PID控制系统转速响应速度快且精确度高、超调量较小,达到稳定后无波动
4.配套说明书【1万字+】:详细介绍建模所用知识以及结果分析