在计算机视觉和深度学习领域,图像特征提取是让机器 "看懂" 图像的步骤,而卷积神经网络(CNN)则是实现这一过程的经典框架。
一、特征提取的逻辑
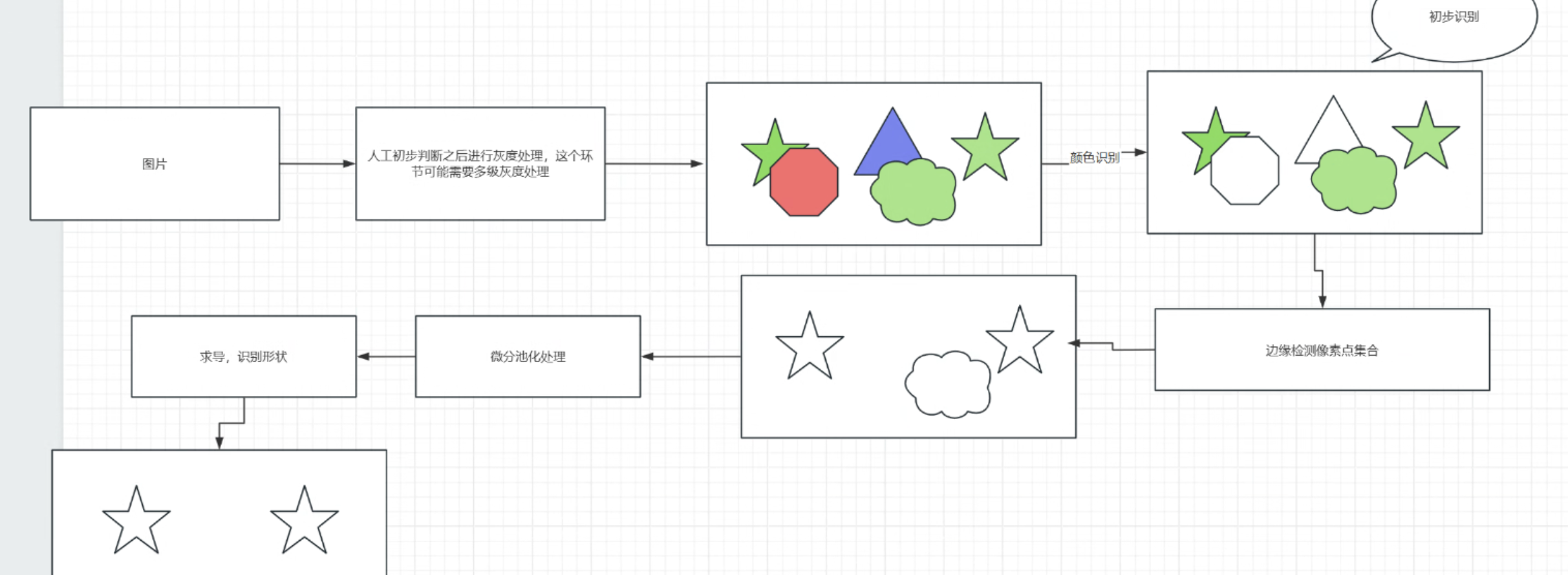
图像特征提取的本质,是将原始图像中杂乱的像素信息,转化为机器可识别、可计算的结构化特征,整个过程遵循从底层基础特征到高层语义特征 的分层提取逻辑:原始图像 → 形状/边缘特征提取 → 颜色特征提取 → 特征压缩优化 → 最终特征表示这一逻辑与人类视觉认知高度相似 ------ 我们看物体时,会先捕捉轮廓边缘,再感知颜色细节,最后整合信息形成对物体的整体认知,机器的特征提取正是对人类视觉的模拟。
二、三大模块:拆解特征提取的每一步
(一)上层:形状与边缘特征提取,抓住物体 "骨架"
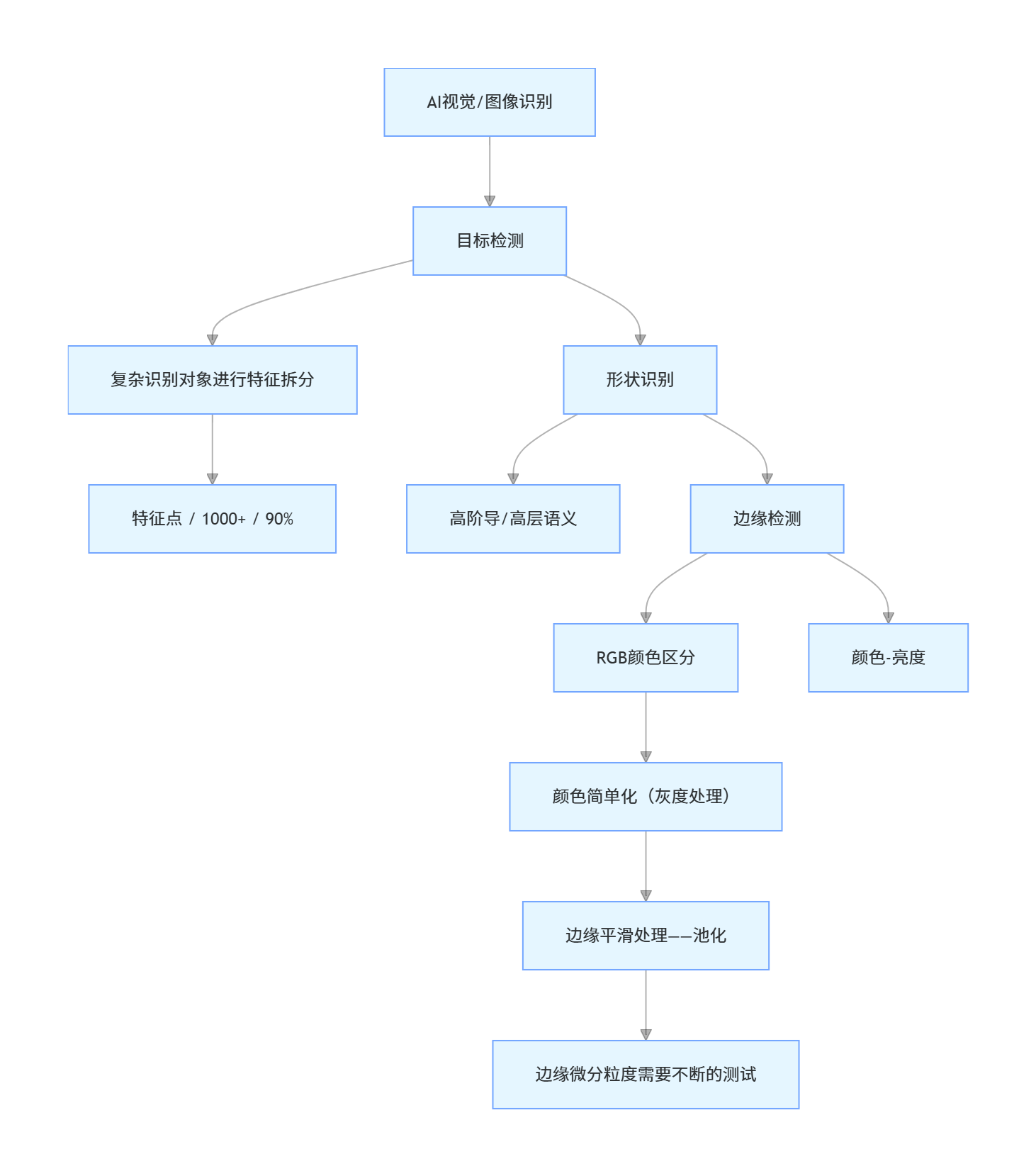
形状与边缘是图像最基础、最主要的特征,是目标分类的首要依据,这一环节的是从像素中捕捉物体的轮廓和结构,为后续识别打下基础。
- 边缘检测:机器 "看" 到物体的第一步,通过 Sobel、Canny 等经典算子,计算像素梯度找到图像中亮度 / 颜色突变的边界,过滤掉无关的纹理细节,精准定位目标轮廓。比如识别五角星时,先通过边缘检测捕捉到五角星的五条边和尖角,这是后续形状识别的基础
- 形状识别:在边缘检测的基础上,将离散的边缘信息组合成目标的几何形状(如圆形、三角形、五角星),还能进一步输出高阶语义特征(如 "交通标志""五角星图案")
- 特征点筛选:一张图像可提取超 1000 个特征点,通过量化筛选保留 90% 以上的主要有效特征,减少后续计算量,避免冗余信息干扰。
(二)中层:颜色特征提取,补充物体 "辨识度"
如果说形状边缘是物体的 "骨架",颜色就是物体的 "外衣",是形状特征的重要补充,在交通标志识别、目标检测等场景中不可或缺,能大幅提升识别的准确率。
- RGB 颜色区分:基于 RGB 三通道的像素值差异,分离图像中的不同颜色区域,比如区分蓝色和橙色的五角星,让机器能通过颜色快速过滤目标。
- 颜色 - 亮度关联分析:解决光照变化对颜色识别的干扰,比如强光或暗光下,同一颜色的像素值会发生变化,通过建立颜色与亮度的关联模型,提升颜色特征的鲁棒性,让特征提取更稳定。
(三)下层:特征简化与压缩,优化计算效率
原始图像和初步提取的特征包含大量冗余信息,直接计算会增加模型负担,这一环节:降维、去噪、压缩,在保留核心特征的前提下,大幅降低计算复杂度,同时提升特征的泛化能力。
- 颜色简单化(灰度处理):将复杂的 RGB 多通道图像转换为灰度图,把数百上千种颜色简化为少数灰度级,减少通道数带来的计算量,复杂图像还可通过多级灰度处理(如直方图均衡化)增强对比度,提升后续边缘检测效果。
- 边缘平滑处理 ------ 池化 :对应 CNN 中的池化层,通过最大池化或平均池化压缩特征图尺寸,保留核心边缘特征,同时增强特征的平移不变性------ 即使目标在图像中轻微移动,机器也能准确识别,这是 CNN 的优化手段之一。
- 边缘微分粒度迭代测试:边缘检测的精细程度(微分粒度)直接影响识别效果,需通过多轮测试调参,平衡精度与鲁棒性。粗粒度抗噪性强但丢失细节,细粒度定位精准但易引入噪声,需根据具体任务找到最优解。
三、特征提取与 CNN 的深度关联:流程对应网络结构
本文拆解的特征提取流程,并非独立于 CNN 之外,而是 CNN 经典工作逻辑的人工化拆解,每一个特征提取环节,都能与 CNN 的核心层一一对应,理解这一对应关系,能让我们更清晰地认识 CNN 的工作原理:
- 边缘检测 / 形状识别 → CNN 卷积层:底层卷积核提取边缘、线条等基础特征,中层卷积核将基础特征组合成形状、结构等复杂特征
- 池化处理 → CNN 池化层:通过下采样压缩特征,减少计算量,提升特征的平移不变性
- 高阶语义输出 → CNN 全连接层 / 检测头(Head 层):将底层提取的特征映射为最终的分类或检测结果,比如将 "五角星形状 + 绿色" 映射为 "交通警告标志"。
四、特征提取的优化原则,适用于所有 CV 任务
无论面对简单的形状识别,还是复杂的目标检测,图像特征提取的优化都遵循统一的原则,能有效提升特征的有效性和模型的性能:
- 补充非线性激活:在边缘检测 / 卷积操作后增加 ReLU 等激活函数,引入非线性,让模型能捕捉更复杂的特征关联
- 减少人工干预:逐步将人工特征提取替换为 CNN 自动学习特征,避免人工设计特征的局限性,适配更复杂的场景
- 提升特征鲁棒性:通过数据增强(旋转、翻转、光照变化)、多尺度边缘检测等方式,让特征提取不受外界环境干扰
- 多特征融合:将形状、颜色、纹理等多维度特征融合,提升目标识别的准确率
- 平衡精度与效率:通过特征点筛选、池化等操作,在保留核心特征的前提下,尽可能降低计算复杂度
五、特征提取的应用场景示例
这套基于 CNN 的特征提取流程,是计算机视觉的基础技术,广泛应用于各类 CV 任务中,也是众多实际项目的底层逻辑:
- 交通标志识别:依托 "形状 + 颜色" 双特征提取逻辑,快速识别圆形、三角形的红、黄、蓝交通标志
- 图像分类 / 目标检测:从海量图像中提取特征,实现对人、车、物的精准分类和定位
- 人脸识别:提取人脸的五官、轮廓等基础特征,为后续的人脸匹配和识别提供依据
- 工业缺陷检测:通过细粒度边缘检测,捕捉产品的微小裂纹、划痕等缺陷特征
- 自动驾驶视觉感知:实时提取道路、车辆、行人、交通信号灯的特征,为自动驾驶决策提供数据支持