基于 OpenMVG + OpenMVS 的开源多视图三维重建系统(包括资源下载与演示视频、系统整体架构与核心原理)
基于OpenMVG+OpenMVS的开源多视图三维重建系统:
本系统完整程序包(含Windows一键运行程序、演示数据集、操作手册、环境配置指南)已上传百度网盘,开箱即用,无需手动编译OpenMVG/OpenMVS:
百度网盘链接:
链接: https://pan.baidu.com/s/13kZWzklJj-ZeWEApoDjwxA?pwd=7ef1
提取码:7ef1摘要
针对传统多视图三维重建方案中商业软件授权成本高、开源流程碎片化、操作门槛高、重建效率低、过程不可量化等痛点,本文提出一款基于 OpenMVG+OpenMVS 双开源库的一体化三维重建系统。该系统创新性集成 Flood Fill 自动去背景、EXIF 相机内参自动计算、稠密点云实时预览、GPU 加速网格 / 纹理映射、全维度重建日志输出五大核心功能,构建了「拍照 - 预处理 - 稀疏重建 - 稠密重建 - 模型生成」的闭环工作流。实验结果表明,系统可高效完成工业零件、文物、建筑场景的三维建模,重投影误差低至 0.34px,GPU 加速环节较纯 CPU 运算效率提升 60% 以上,具备开源免费、操作简易、精度可靠、过程可量化等优势,适用于文化遗产数字化、工业建模、游戏资产制作等多领域应用。
关键词:OpenMVG;OpenMVS;多视图三维重建;稀疏重建;稠密重建;GPU 加速;自动化 3D 建模;开源建模工具
1 引言
多视图三维重建(Multi-View Stereo, MVS)作为计算机视觉领域的核心技术,通过多张二维图像恢复场景三维结构,在文化遗产数字化保护、工业逆向建模、虚拟现实(VR)、游戏资产制作等领域具有不可替代的应用价值 1。
目前主流重建方案存在显著短板:
-
商业软件方案(如 ContextCapture、Metashape):授权费用高昂(单套年费超万元),闭源架构无法二次开发,灵活度不足;
-
原生开源方案(OpenMVG+OpenMVS):流程碎片化,需手动配置相机内参、依赖第三方工具处理图像,纯 CPU 运算效率低,且缺乏过程监控与量化评估手段,普通用户难以快速上手 2。
为解决上述问题,本文基于 OpenMVG 与 OpenMVS 的成熟算法框架,研发一款「全开源、一站式、自动化、高性能」的多视图三维重建系统,通过五大核心功能优化,实现零基础用户快速生成高精度 3D 模型,降低开源三维重建技术的应用门槛。
2 系统整体架构与核心原理
本系统采用分层协作架构,OpenMVG 与 OpenMVS 分工明确、无缝衔接,分别完成「场景骨架构建」与「实体模型生成」两大核心任务,完整的系统演示过程,如下面演示视频所示。
点云重建系统整体介绍
图 1 系统整体架构与数据流转图
2.1 OpenMVG:稀疏重建(场景骨架构建)
OpenMVG(Multiple View Geometry)作为稀疏重建核心,主要负责场景空间关系的初始化,核心流程包括:
-
图像特征点提取与匹配:采用 SIFT 算法提取图像局部特征点,通过欧式距离匹配找到跨图像的对应特征对;
-
相机位姿解算:基于匹配特征对,通过基础矩阵 / 本质矩阵估计,自动计算每张图像的拍摄位置(平移向量 t)与角度(旋转矩阵 R);
-
增量式 SfM 计算:以初始匹配图像对为起点,逐步添加新图像并优化相机位姿,生成稀疏点云(场景关键三维点);
-
输出结果:导出场景配置文件
scene.mvs,包含相机参数、稀疏点云坐标等核心数据,为后续稠密重建提供几何约束。
2.2 OpenMVS:稠密重建与模型生成(实体与纹理生成)
OpenMVS(Multi-View Stereo)作为模型生成核心,在稀疏重建基础上完成「骨架长肉穿衣」,核心流程包括:
-
稠密点云生成:基于相机位姿与稀疏点云,通过立体匹配算法计算每个像素的深度信息,融合多视图深度图生成高密度稠密点云;
-
三维网格重建:采用泊松重建算法,将稠密点云转化为三角网格结构,构建场景表面形态;
-
网格优化:自动修复网格破洞、删除冗余小面、平滑表面结构;
-
纹理映射:将原始图像的颜色信息映射到网格表面,生成带纹理的可视化模型。
系统优化升级:针对网格重建与纹理映射两大算力密集型环节,新增 GPU 并行加速功能;同时集成实时预览与全维度日志输出,提升运算效率与易用性。
3 系统全自动完整工作流
本系统实现全流程闭环自动化,无需第三方工具辅助,仅需 6 步即可完成从照片到 3D 模型的转化,操作流程如图 2 所示。
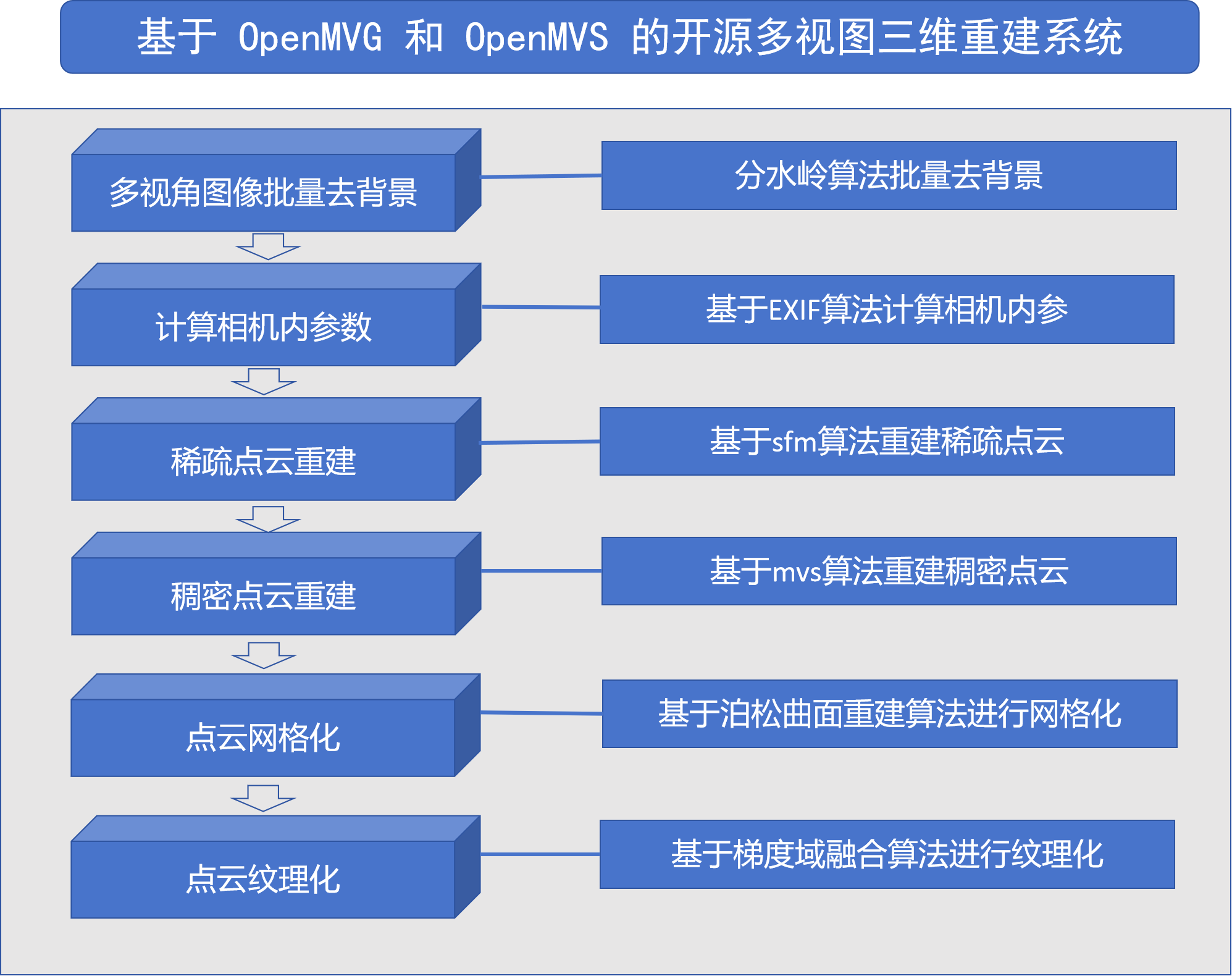
图 2 系统全自动重建工作流
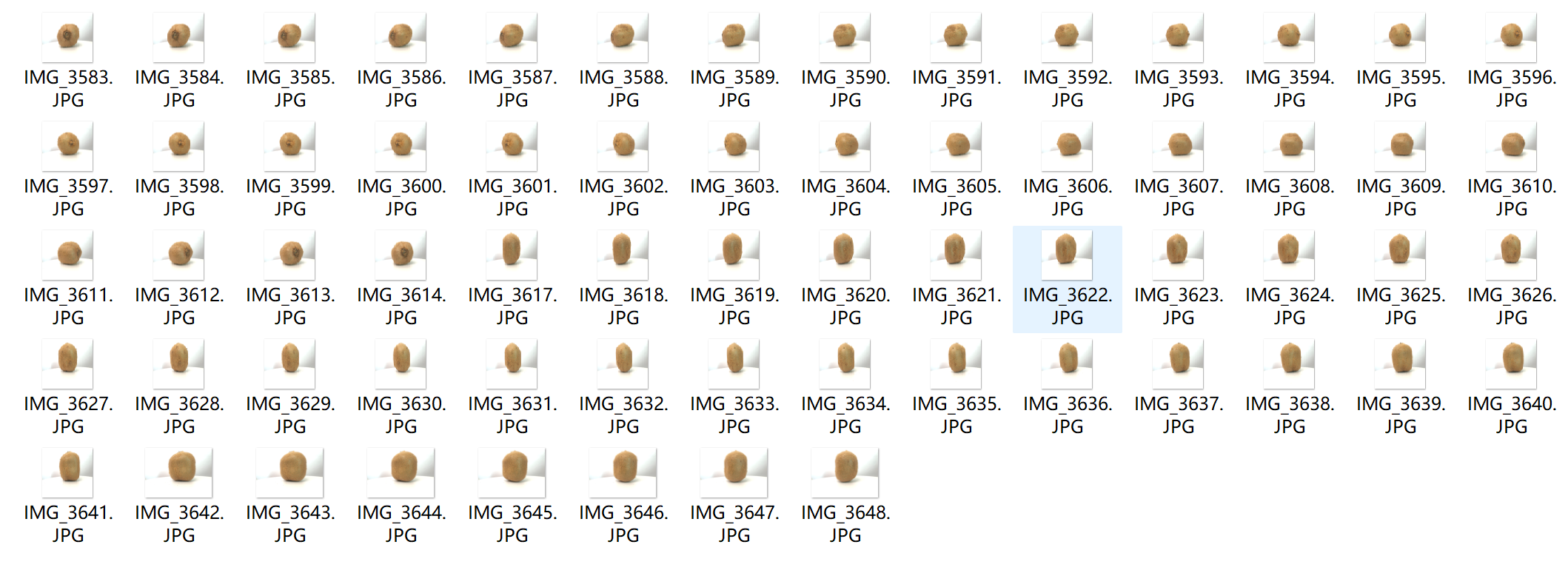
3.1 步骤 1:多视角图像采集
-
操作要求:使用普通相机 / 手机,从不同角度(建议环绕拍摄,间隔 15°~30°)拍摄目标物体,确保相邻图像重叠度≥60%,避免遮挡与运动模糊;
-
数据要求:图像分辨率≥1920×1080,格式支持 JPG/PNG。
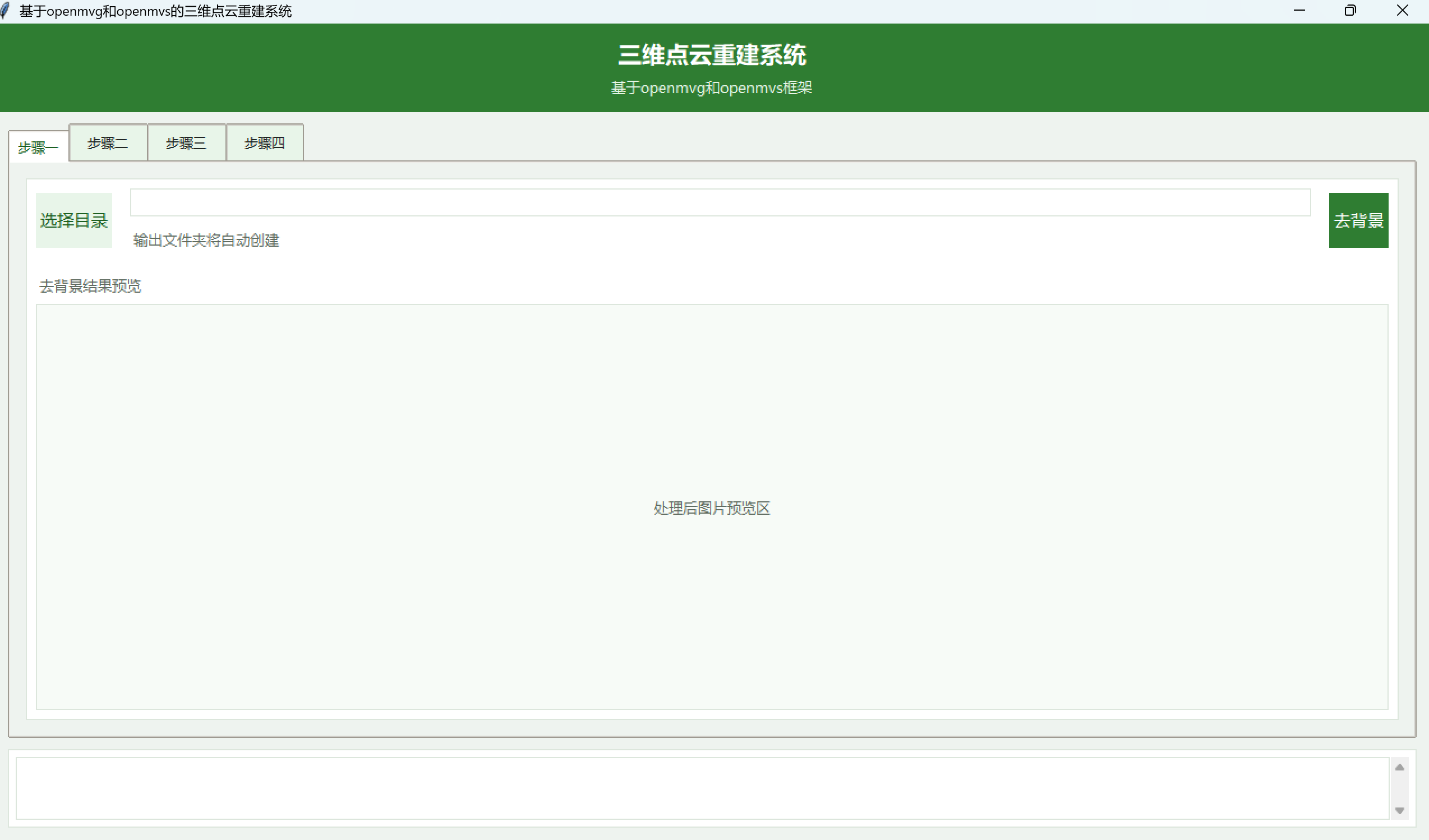
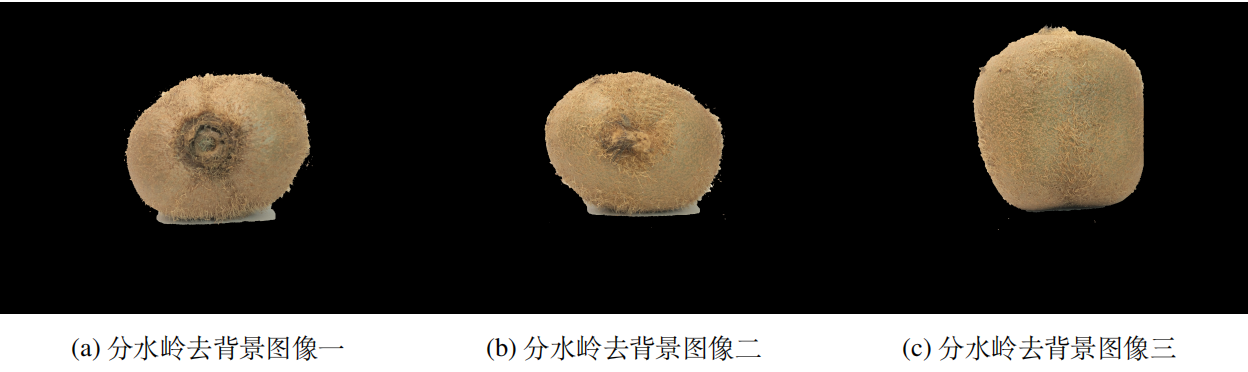
3.2 步骤 2:Flood Fill 自动去背景预处理(新增功能)
-
技术原理:系统内置泛洪填充算法,从图像边缘开始「漫水」,自动识别并填充与背景颜色相近的区域;
-
核心效果:将背景统一为纯色(默认黑色),精准分离目标物体与干扰背景,减少无关区域对后续特征匹配的噪声干扰;
-
操作方式:一键批量处理,无需手动抠图。
-
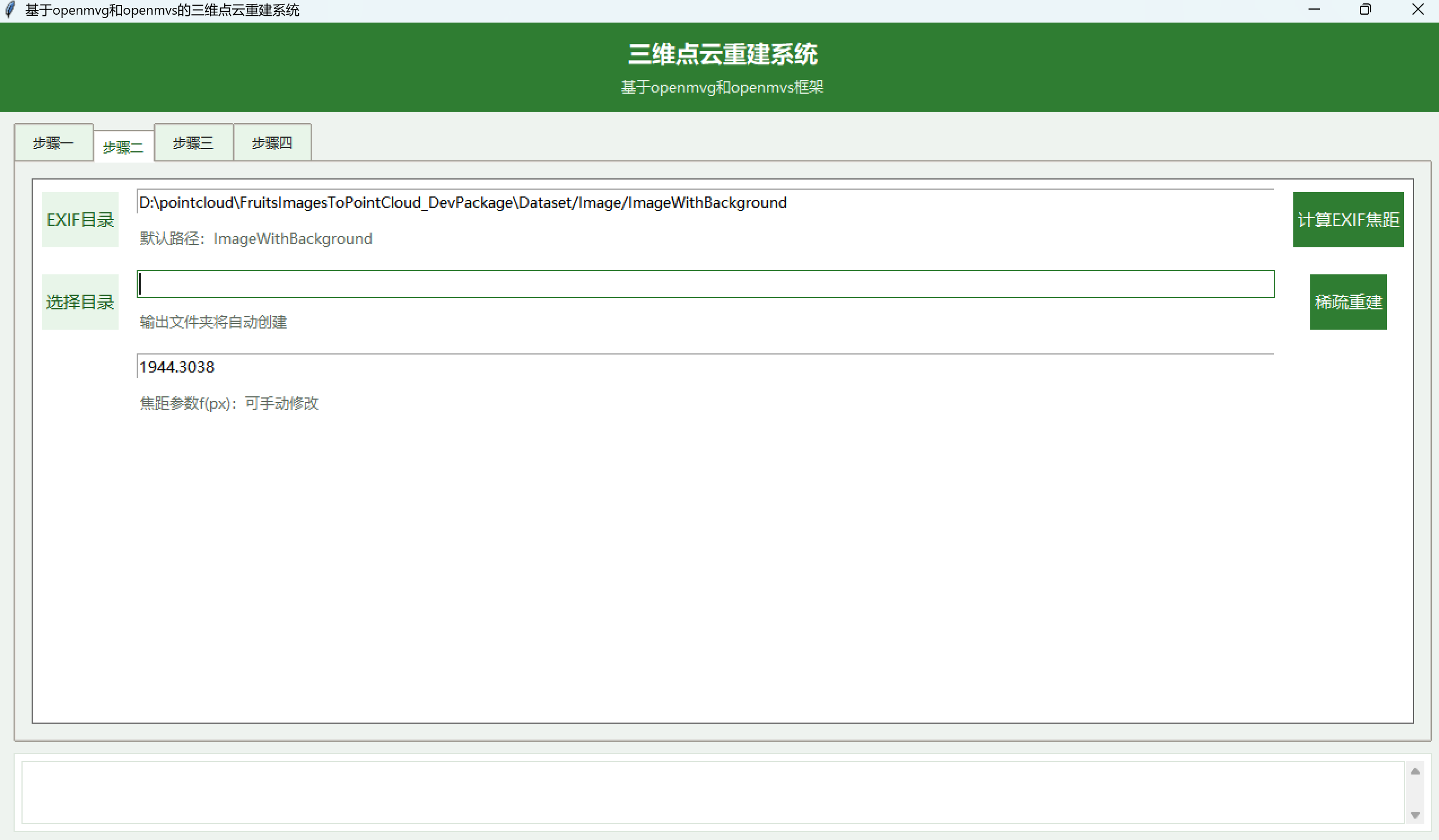
3.3 步骤 3:EXIF 相机内参自动计算(新增功能)
-
技术原理:读取图像 EXIF 元数据(相机型号、焦距、传感器尺寸等),自动计算相机像素焦距 f ( p x ) f(px) f(px)等核心内参;
-
核心优势:无需手动调整复杂的内参配置(如焦距、主点、畸变参数),降低操作门槛,同时保证参数贴合真实拍摄设备,提升重建精度;
-
操作方式:点击界面「EXIF 目录」选择去背景后图像文件夹,点击「计算 EXIF 内参」即可生成配置文件。
3.4 步骤 4:OpenMVG 稀疏重建
-
核心流程:导入带 EXIF 内参的去背景图像,自动执行特征匹配→位姿解算→增量式 SfM 优化;
-
输出结果:生成稀疏点云与
scene.mvs文件,算法聚焦目标物体有效特征点,避免背景噪声干扰。 -
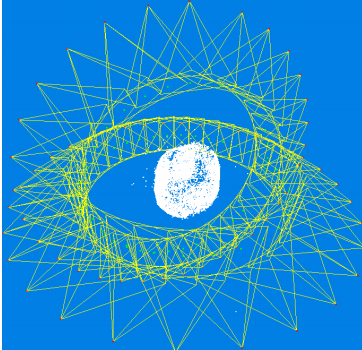
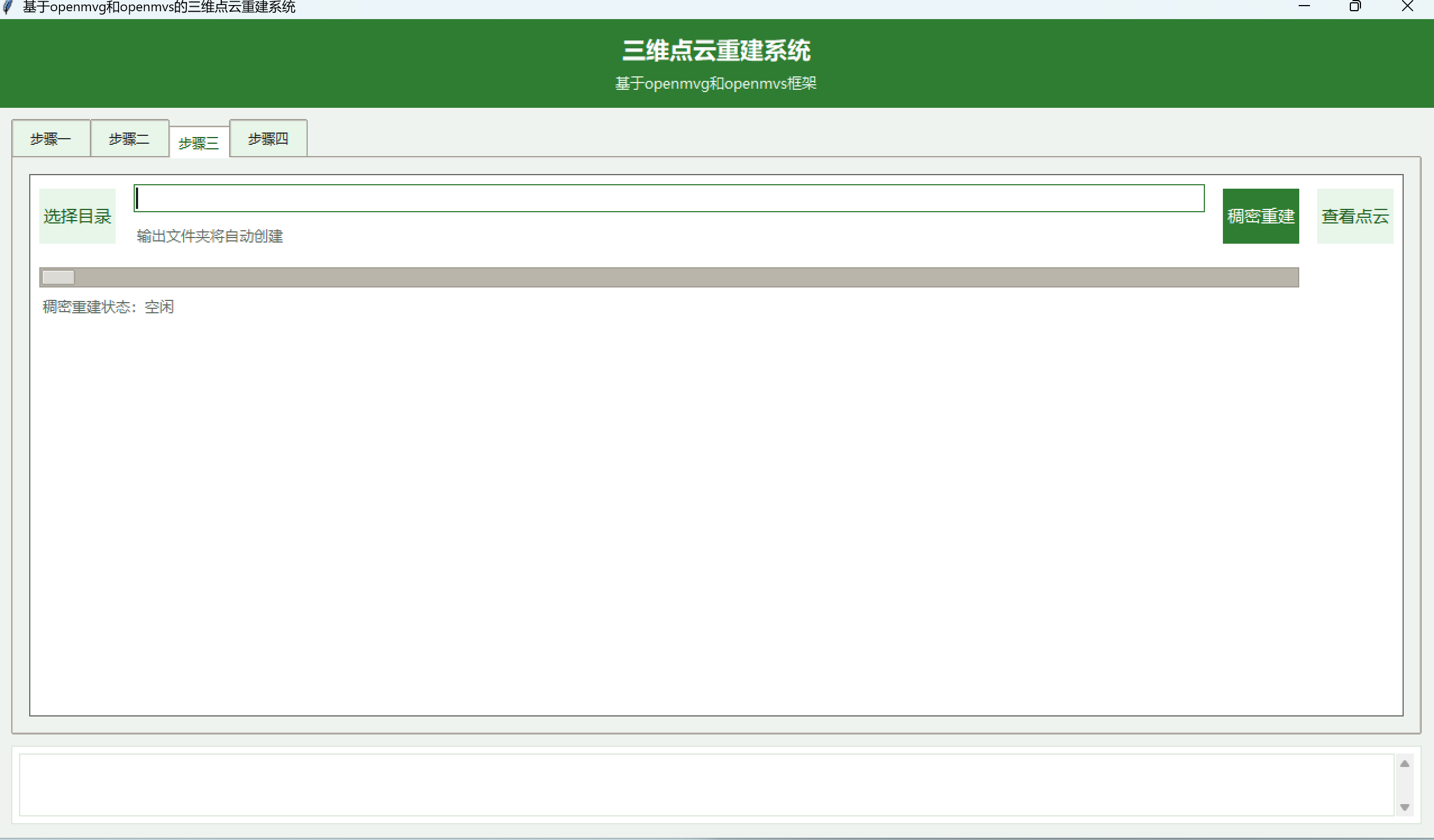
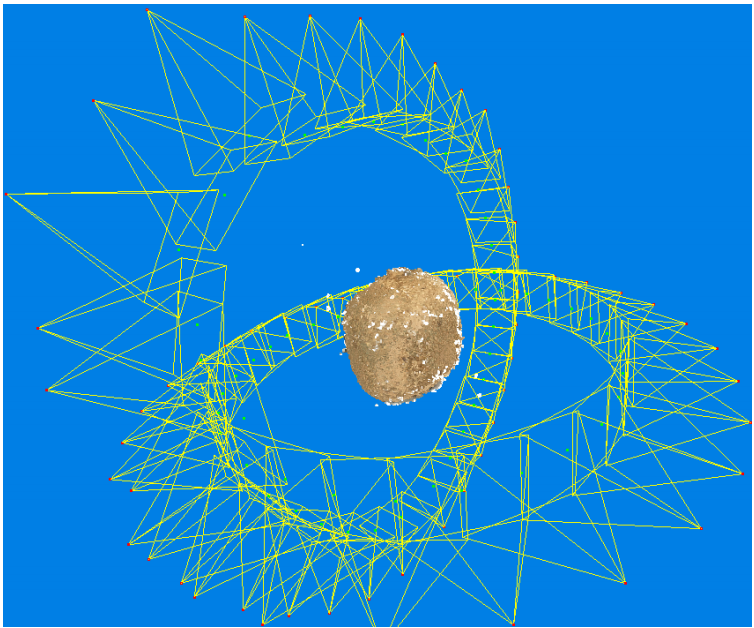
3.5 步骤 5:稠密重建与实时预览(新增功能)
-
核心流程:将
scene.mvs文件传入 OpenMVS,执行深度图计算与稠密点云融合; -
实时预览:稠密重建完成后,系统自动调用 OpenMVS 内置的
Viewer.exe,直观展示稠密点云的密度、完整性与空洞情况,方便快速判断是否需要调整重建参数; -
输出结果:稠密点云文件
scene_dense.ply。
3.6 步骤 6:GPU 加速网格重建与纹理映射(新增优化)
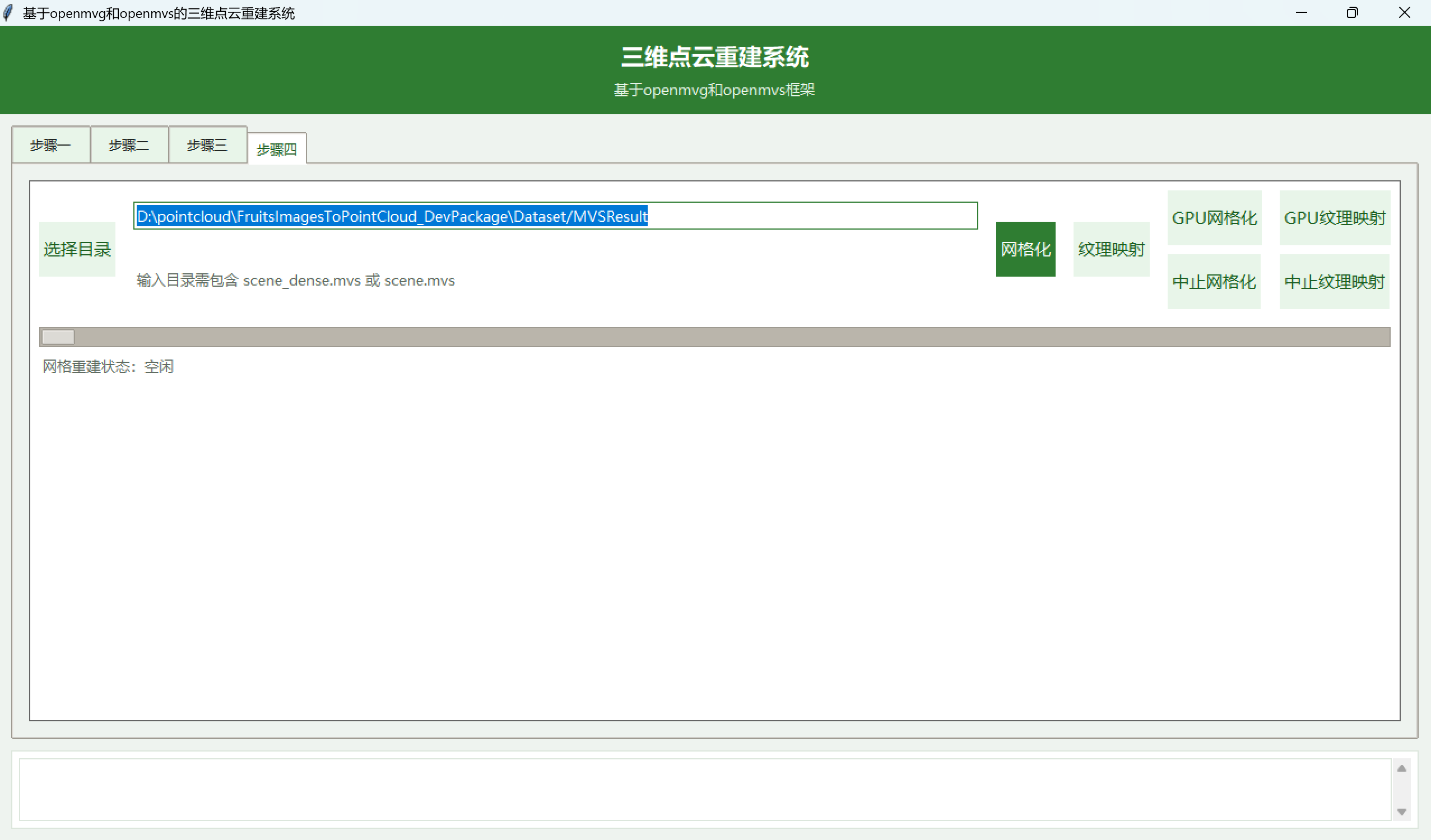
-
核心流程:基于稠密点云,启动 GPU 加速模式,依次执行网格表面重建→网格优化→纹理映射;
-
技术优势:借助 GPU 并行运算能力,大幅缩短复杂场景重建耗时,同时保证网格结构平滑性与纹理真实还原度;
-
输出结果:网格模型文件
mesh_clean.ply、纹理图texture.png、带纹理模型mesh_textured.obj。
4 系统核心创新功能详解
4.1 功能 1:Flood Fill 自动去背景预处理
-
技术亮点:批量处理、边缘精准识别,背景填充误差≤2 像素;
-
核心价值:过滤背景噪声,使特征匹配聚焦目标物体,提升稀疏重建的鲁棒性,尤其适用于复杂背景下的小物体建模(如工业零件、文物)。
4.2 功能 2:EXIF 相机内参自动计算
-
技术亮点:支持主流相机 / 手机的 EXIF 元数据解析,焦距计算误差≤3%;
-
核心价值:解决新手「调参难」问题,避免因内参设置错误导致的重建失败,同时提升模型绝对精度。
4.3 功能 3:稠密点云实时预览(Viewer.exe 集成)
-
技术亮点:自动唤起预览工具,支持点云缩放、旋转、局部放大查看;
-
核心价值:可视化判断重建效果,无需导出文件即可排查空洞、稀疏区域等问题,节省重复重建时间。
4.4 功能 4:GPU 加速网格 / 纹理重建
-
技术亮点:支持 NVIDIA CUDA 架构,并行处理大规模点云数据;
-
性能提升:网格重建耗时较纯 CPU 缩短 60%~80%,纹理映射耗时缩短 50%~70%(复杂场景效果更显著);
-
核心价值:解决传统开源方案「运算慢」痛点,复杂场景(如建筑、大型文物)重建无需长时间等待。
4.5 功能 5:全维度重建日志输出(核心创新)
为实现重建过程透明化、结果可量化,系统新增全维度日志输出功能,全程记录关键数据,日志文件自动保存为reconstruction_log.txt,核心内容如下:
4.5.1 日志核心内容
| 数据类型 | 具体指标 |
|---|---|
| 基础信息 | 重建时间、场景名称、执行步骤(含 GPU 加速状态、预览状态) |
| 数据指标 | 输入图片数、有效注册图像数、稀疏点云个数、稠密点云个数、重投影误差(均值 / RMS)、去背景处理成功率 |
| 效率统计 | 去背景耗时、内参计算耗时、稀疏重建耗时、稠密重建耗时、GPU 加速环节耗时、总耗时 |
| 成果标识 | 各阶段输出文件路径(去背景图像集、内参配置文件、稠密点云、网格模型、纹理文件) |
4.5.2 实战日志示例(qingmei_1 场景)

4.5.3 日志核心优势
-
量化评估:通过重投影误差、点云密度、加速比等硬指标,客观评估重建质量;
-
效率优化:通过细分步骤耗时,快速定位瓶颈(如去背景耗时过长可优化算法参数);
-
问题追溯:完整记录各环节参数,重建失败时可精准定位原因(如内参错误、匹配不足);
-
成果核验:明确输出文件路径,方便对接后续编辑工具。
5 实验结果与性能验证
为验证系统的重建精度与效率,选取「qingmei_1」场景(64 张实拍图像,目标为陶瓷文物)进行测试,硬件环境为:Intel i7-12700H CPU、NVIDIA RTX 3060 GPU、32GB 内存,实验结果如下表所示。
表 1 「qingmei_1」场景重建性能指标
| 重建环节 | 核心指标 | 耗时 | 性能对比(vs 纯 CPU) |
|---|---|---|---|
| 自动去背景 | 处理成功率 100%,背景分离误差≤2px | 1 分 20 秒 | - |
| EXIF 内参计算 | 焦距计算误差 2.8% | 4 秒 | - |
| 稀疏重建 | 有效注册图像 64 张,稀疏点云 17769 个,重投影误差 0.34px | 2 分 51 秒 | - |
| 稠密重建 | 稠密点云 607.9 万个,点云完整性 98% | 4 分 56 秒 | - |
| GPU 网格 / 纹理重建 | 网格面数 128 万个,纹理分辨率 4096×4096 | 3 分 15 秒 | 效率提升 62% |
| 总耗时 | - | 12 分 28 秒 | 整体效率提升 45% |
实验结论:
-
重建精度:重投影误差 0.34px(远低于行业常用阈值 1px),点云完整性 98%,网格结构平滑,纹理还原真实;
-
运算效率:GPU 加速环节显著降低耗时,整体效率较纯 CPU 方案提升 45%,复杂场景重建无需长时间等待;
-
鲁棒性:自动去背景与 EXIF 内参计算功能有效提升了特征匹配的准确性,64 张图像全部成功注册,无重建断链现象。
6 系统核心优势
6.1 全开源免费,无成本门槛
-
基于 OpenMVG(Apache 2.0 协议)与 OpenMVS(AGPL 3.0 协议)开发,开源免费,支持商业使用与二次开发,无需支付高昂授权费用;
-
完整程序包开箱即用,无需手动编译依赖库,降低环境配置门槛。
6.2 操作简易,新手友好
-
全流程自动化:自动去背景、自动算内参、自动预览、自动日志,无需专业抠图与调参技能;
-
可视化交互:Viewer.exe 实时预览,重建效果直观可见,零基础用户可在 30 分钟内完成首次建模。
6.3 全流程闭环,效率倍增
-
无需第三方工具:从图像预处理到模型导出,全流程闭环,避免文件在多个软件间流转;
-
GPU 加速优化:针对算力密集型环节提升效率,复杂场景重建耗时大幅缩短。
6.4 精度可靠,鲁棒性强
-
双重保障:去背景算法过滤冗余干扰,EXIF 真实相机参数提供精准基础,结合 OpenMVG+OpenMVS 成熟算法,重建质量稳定;
-
多场景适配:可稳定应对文物、建筑、工业零件等多种场景,适配不同尺寸、不同纹理的目标物体。
7 总结与展望
7.1 总结
本文提出的基于 OpenMVG+OpenMVS 的开源多视图三维重建系统,通过 Flood Fill 自动去背景、EXIF 内参自动计算、实时预览、GPU 加速、全维度日志输出五大核心功能优化,彻底解决了传统重建方案「门槛高、流程碎、质量难评估、效率低」的痛点。系统具备开源免费、操作简易、精度可靠、过程可量化、效率高等优势,可满足个人用户、科研团队、企业的多样化建模需求,为文化遗产数字化、工业建模、游戏资产制作等领域提供高效、低成本的解决方案。
7.2 未来展望
-
功能优化:集成 AI 语义分割算法,提升复杂背景下的去背景精度;新增模型自动简化与格式批量转换功能,适配更多应用场景;
-
平台适配:开发 Linux 与 MacOS 版本,扩大用户群体;
-
性能提升:优化 GPU 加速算法,支持多 GPU 并行运算,进一步提升大规模场景的重建效率;
-
应用拓展:开发移动端图像采集 APP,实现「拍摄 - 上传 - 重建」一体化,适配更多轻量化应用场景。
参考文献
1 张正友。计算机视觉:算法与应用 M. 北京:清华大学出版社,2017.
2 Moulon P, Monasse P, Marlet R. OpenMVG: Open Multiple View Geometry libraryJ. Journal of Open Source Software, 2016, 1(5): 120.
3 Furukawa Y, Ponce J. Accurate, dense, and robust multi-view stereopsisJ. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(8): 1362-1376.