C# 基于OpenCv的视觉工作流-章43-轮廓匹配
本章目标:
一、匹配原理;
二、模板创建;
三、模板匹配;
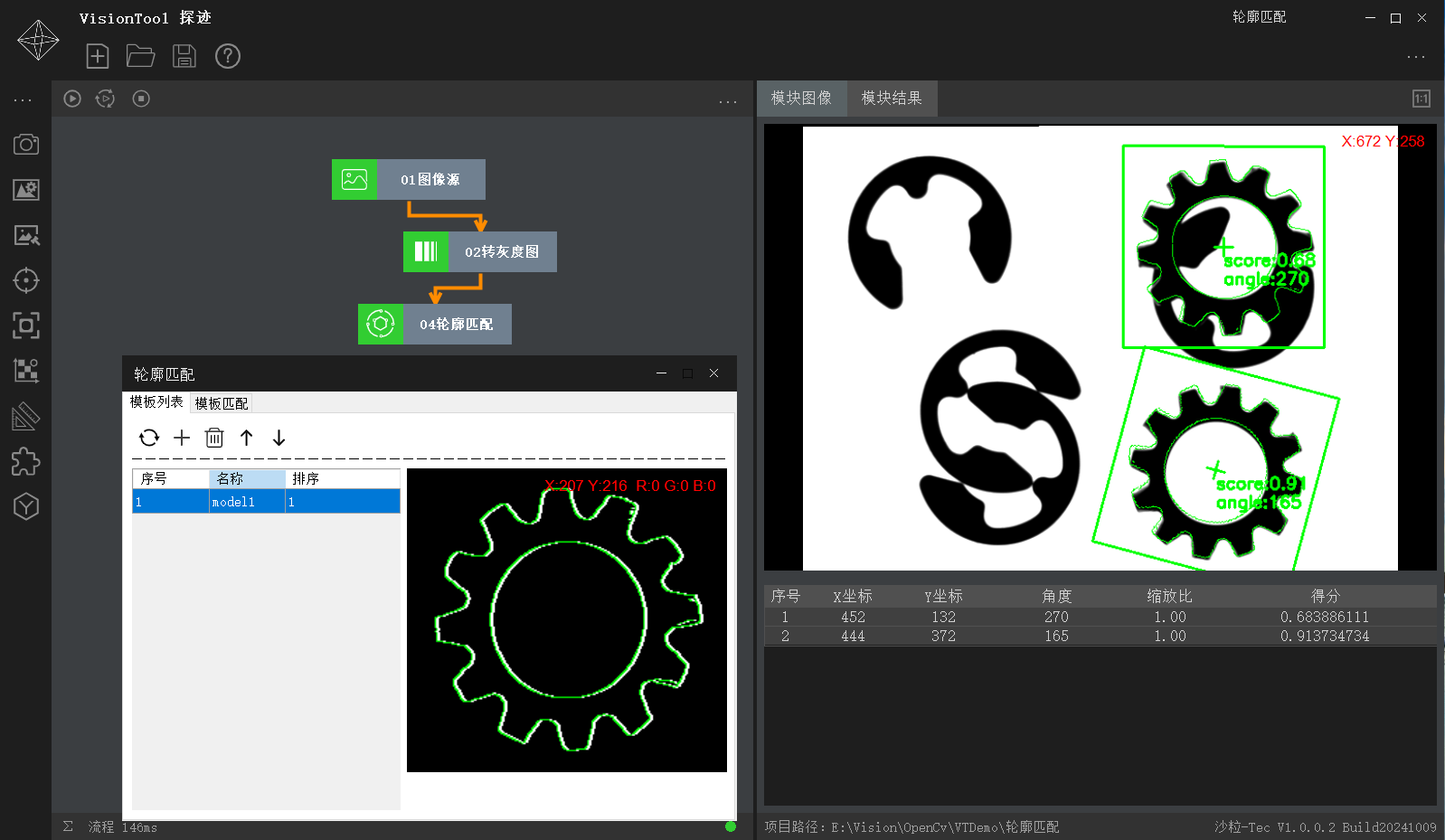
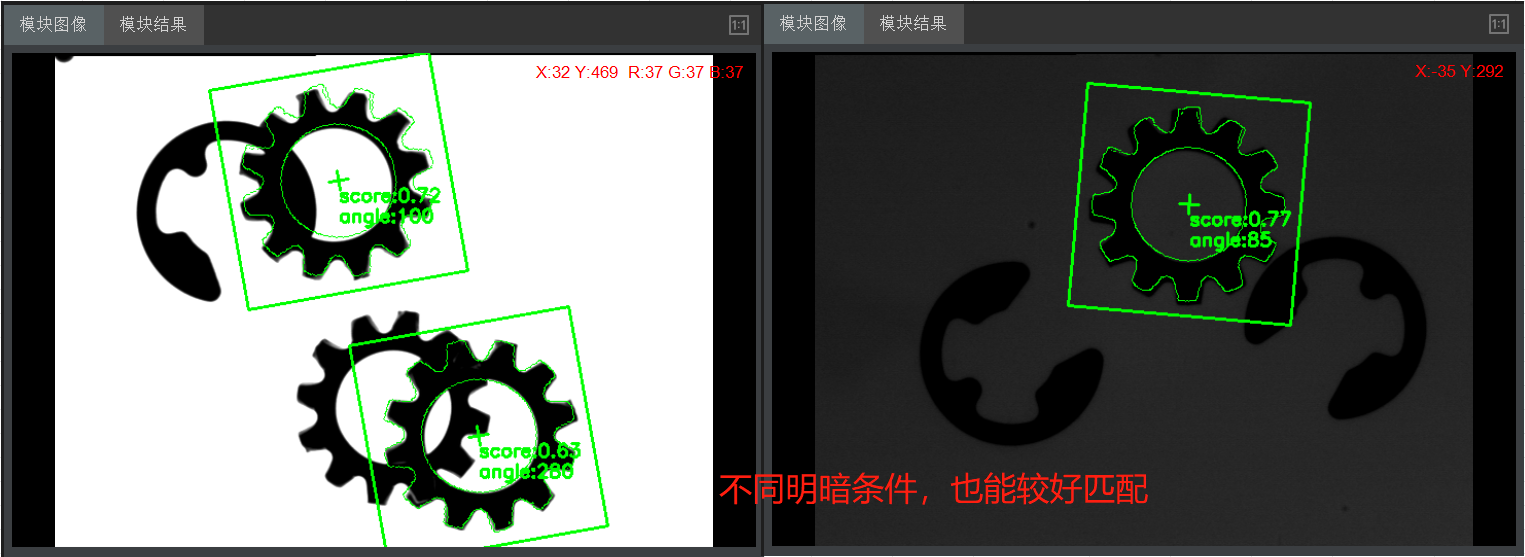
本章与章41模板匹配基本相似,在章42基础上,先对图像进行边缘检测,提取轮廓,以轮廓制作模板,匹配时也先对原图进行边缘检测,提取轮廓,最后再进行匹配。整体不同处在于先对图像进行预处理,好处在于匹配适应性更高,对光线明暗不同的图像也能进行更好的匹配。
一、匹配原理
章41已介绍,不再详述;
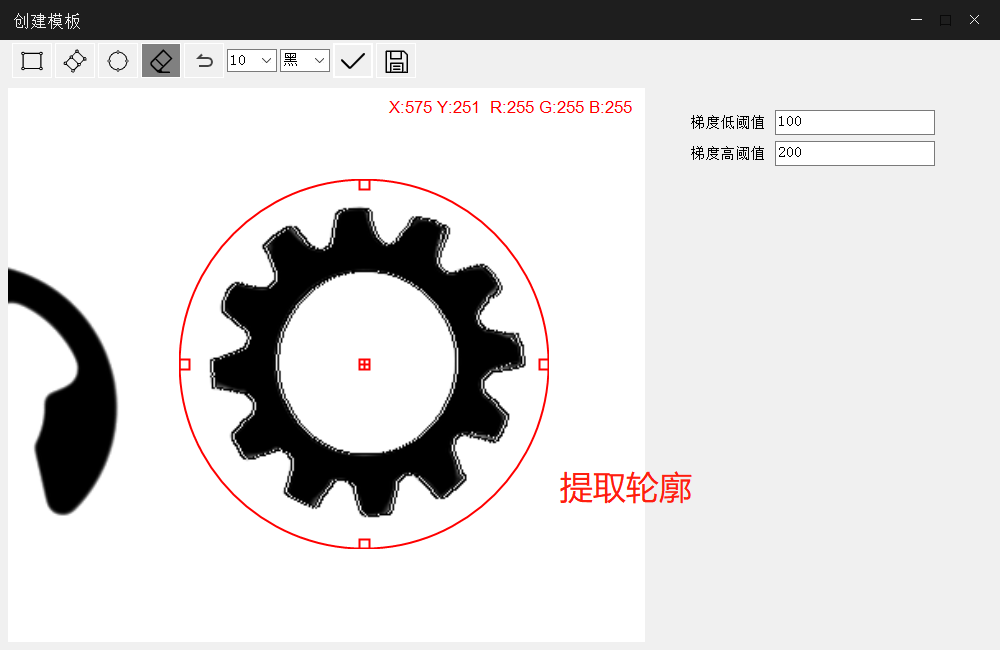
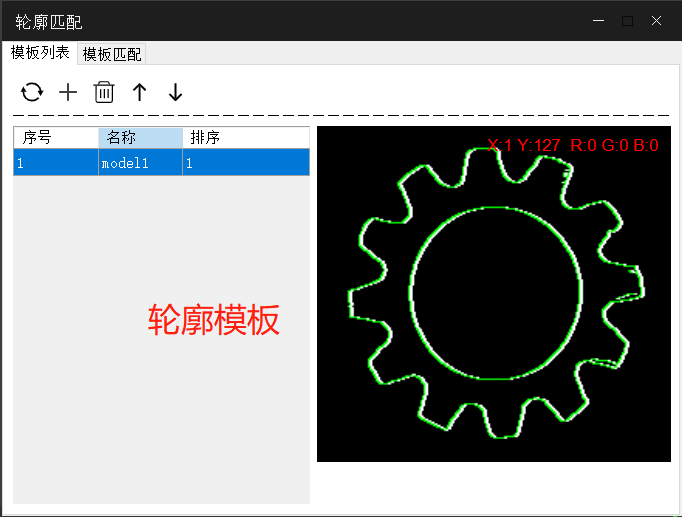
二、模板创建
边缘检测、轮廓提取在前文章节已介绍,不再详述;
三、模板匹配
参考章42;
匹配效果,如下图
参考链接
https://blog.csdn.net/weixin_39450742/article/details/118600274
https://cloud.tencent.com/developer/article/1440371
https://blog.csdn.net/weixin_40003233/article/details/111283977
https://blog.csdn.net/weixin_41275726/article/details/89645477
"VisionTool 探迹"免费视觉工具
下载地址:https://pan.baidu.com/s/11tktKOSnepLNIEqNbvnv6w?pwd=qv5i
"VisionTool Halcon"付费视觉工具
下载地址:https://pan.baidu.com/s/1v832KTonDYS6oNnWG2iZtQ?
对应系列文章"C# 基于Halcon的视觉工作流",欢迎前往阅读。
上述内容需要一定的技术功底,本章至此已结束,欢迎阅读下章,谢谢!