点云外参自动标定工具
-
- 一、为什么需要自动标定?
- 二、工具能做什么?
- 三、核心原理:配准的两步走策略
-
- [第一步:全局粗配准(RANSAC + FPFH)](#第一步:全局粗配准(RANSAC + FPFH))
- 第二步:精细配准(ICP)
- 四、自动调参:让算法自己找最优解
- 五、实战操作:从采集到标定全流程
- 六、效果评估:如何判断标定得好不好?
- 七、总结
一句话介绍:本文介绍了一个能自动估算两个激光雷达之间位置关系的工具,就像给机器人做"视力校正",让它们看到的世界能够对齐。
你有没有想过,当一辆自动驾驶汽车上装了多个激光雷达,这些雷达各自看到的画面怎么能完美拼合在一起?或者当机器人需要融合多个传感器的数据时,如何确保它们"看到"的是同一个世界?
这个问题的答案就是外参标定 ------计算不同传感器之间的相对位置和朝向。传统方法需要人工反复调整参数,既耗时又容易出错。这里介绍一个自动标定工具,它自己摸索出最佳的标定参数,让点云配准变得又快又准。
一、为什么需要自动标定?
想象一下,你有一台相机和一部手机,想用它们同时拍一张桌子。如果相机放在桌子左边,手机放在桌子右边,拍出来的照片角度就不同。想要合成一张完整的桌子照片,你需要知道相机和手机之间相差多少距离 和偏了多少角度。
对激光雷达来说也是同样的道理。多个雷达采集的点云(三维空间中的点集)需要精确对齐,才能用于后续的物体识别、地图构建等任务。这个对齐关系就是外参 ,而找到这个关系的过程就是标定。
传统标定的痛点:
- 需要人工反复尝试不同的参数
- 对点云质量敏感,不同的数据需要不同的参数
- 过程繁琐,效率低,结果不稳定
自动标定的优势:
- 算法自动搜索最优参数,无需人工干预
- 适应不同的点云数据,鲁棒性好
- 可以量化评估标定质量
二、工具能做什么?
输入输出
- 输入 :两个点云文件(源点云和目标点云,PCD格式)
- 源点云:需要变换坐标的雷达数据
- 目标点云:作为参考基准的雷达数据
- 输出 :一个4×4的变换矩阵,表示源点云如何旋转和平移到目标点云坐标系
- 同时输出四元数(更简洁的旋转表示)和平移向量
可选功能
- 自动优化配准参数(体素大小、特征半径、匹配阈值等),找到最佳参数组合
- 可视化配准结果,直观检查对齐效果
三、核心原理:配准的两步走策略
点云配准就像把两块拼图拼在一起,但这个拼图没有图案,只有密密麻麻的点。我们的策略是先粗后精。
第一步:全局粗配准(RANSAC + FPFH)
是什么 :
这是快速找到大致对齐位置的方法,类似于先确定拼图的大致方位。
为什么需要 :
如果两块点云初始位置相差很大,直接精细匹配容易陷入局部最优(比如只对齐了局部区域,但整体是歪的)。粗配准能给出一个不错的初始位置,为精细匹配打好基础。
如何操作:
- 下采样:把点云变得稀疏一些,降低计算量(就像看照片时先看缩略图)
- 计算FPFH特征:为每个点生成一个"指纹",描述它周围的几何形状。即使物体旋转了,这个指纹也基本不变
- 特征匹配:在源点云和目标点云中找到指纹相似的点对
- RANSAC :从这些匹配中随机抽样,反复尝试,找到最合理的变换关系。我们还加入了一个先验初始变换(例如假设前后雷达在x方向相差1.8米),让搜索更有方向性
第二步:精细配准(ICP)
是什么 :
在粗配准的基础上,进一步微调,让点云完全贴合。
为什么需要 :
粗配准的精度有限,可能还有几厘米的误差。ICP可以把这个误差缩小到毫米级。
如何操作:
- 迭代地寻找源点云中的每个点在目标点云中的最近点
- 根据这些对应点计算最优变换
- 重复上述步骤,直到变化很小或达到最大迭代次数
四、自动调参:让算法自己找最优解
配准算法有多个参数需要设置,比如下采样的大小、特征搜索半径、匹配阈值等。这些参数设置不当会导致配准失败或精度不足。我们的工具提供了自动参数优化功能,可以自适应地找到最佳参数组合。
1、优化哪些参数?
| 参数 | 作用 | 搜索范围 |
|---|---|---|
| 体素大小 | 决定点云下采样后的密度 | 0.1~0.3米 |
| 法线半径倍数 | 计算表面法线时的搜索范围 | 1~5倍体素 |
| FPFH半径倍数 | 计算特征描述子的范围 | 3~15倍体素 |
| RANSAC距离倍数 | 判断是否为内点的阈值 | 1~4倍体素 |
| ICP距离倍数 | ICP匹配的距离阈值 | 0.2~1.0倍体素 |
| ICP迭代次数 | 精细匹配的迭代上限 | 30~200次 |
2、优化目标
我们的目标是让配准结果:
- Fitness(覆盖率) 越高越好:表示有多少点成功匹配
- RMSE(匹配误差) 越低越好:表示匹配的精确度
综合得分公式:得分 = fitness - 2 × RMSE
3、两种优化算法
3.1、模拟退火(默认)
是什么 :
受冶金学中"退火"过程启发------金属加热后缓慢冷却,原子会趋向最低能量状态。
为什么用 :
简单易实现,不需要额外库,能有效跳出局部最优。
如何操作:
- 初始阶段随机采样,广泛探索
- 之后在历史最优附近做小幅扰动,精细搜索
- 如果连续3次达到目标质量(fitness≥0.75且RMSE≤0.06),提前终止
3.2、贝叶斯优化
是什么 :
基于概率模型的优化方法,通过建立代理模型来预测哪些参数可能更好。
为什么用 :
效率更高,用更少的迭代找到最优解(适合计算成本高的场景)。
如何操作:
- 建立高斯过程模型,记录每次评估的结果
- 选择"最有希望"的参数进行下一步探索
- 平衡探索(尝试未知区域)和开发(利用已知最优)
五、实战操作:从采集到标定全流程
步骤1:在设备上采集点云
首先,我们需要采集两个激光雷达的点云数据。以下脚本会在Apollo设备上运行,订阅指定话题并保存点云为PCD文件。
python
# 创建采集脚本
cat > capturer_pcd.py << 'EOF'
import sys
import os
sys.path.append("/opt/apollo/neo/python/cyber/python")
sys.path.append("/opt/apollo/neo/python")
from cyber_py3 import cyber
from modules.common_msgs.sensor_msgs import pointcloud_pb2
import cv2
import numpy as np
import open3d as o3d
import struct
pc_topic=sys.argv[1]
save_name=sys.argv[2]
pc_save_path=f"{save_name}.pcd"
accumulation_pts = []
header = """# .PCD v0.7 - Point Cloud Data file format
VERSION 0.7
FIELDS x y z intensity
SIZE 4 4 4 4
TYPE F F F F
COUNT 1 1 1 1
WIDTH {}
HEIGHT 1
VIEWPOINT 0 0 0 1 0 0 0
POINTS {}
DATA binary
"""
def process_pointcloud(points) -> None:
"""保存点云数据"""
pts = points.astype(np.float32)
raw_point = pts[:, :3]
raw_labels = pts[:, 3:]
max_dim = np.max(raw_labels)
# 创建Open3D点云对象
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(raw_point)
# Get min and max bounds
min_bound = pcd.get_min_bound()
max_bound = pcd.get_max_bound()
extent = max_bound - min_bound
print(f"Bounding box: min={min_bound}, max={max_bound}")
print(f"Extent (size) per axis: {extent}")
print(f"Diagonal length: {np.linalg.norm(extent)}")
# 将标签转换为颜色
fake_colors = raw_labels / max_dim
n, _ = fake_colors.shape
fake_colors = np.concatenate((fake_colors, np.zeros((n, 2))), axis=1)
pcd.colors = o3d.utility.Vector3dVector(fake_colors)
# 体素下采样
pcd_new = pcd.voxel_down_sample(0.05)
new_points_xyz = np.asarray(pcd_new.points)
new_labels = np.asarray(pcd_new.colors)[:, :2] * max_dim
# 合并点云和标签
processed_points = np.concatenate((new_points_xyz, new_labels), axis=1).astype(np.float32)
return processed_points
def save_result():
global accumulation_pts
global pc_save_path
if len(accumulation_pts)<6000:
return
processed_points=process_pointcloud(np.array(accumulation_pts))
with open(pc_save_path, 'wb') as f:
f.write(header.format(len(processed_points), len(processed_points)).encode('utf-8'))
for point in processed_points:
f.write(struct.pack('ffff', point[0], point[1], point[2], point[3]))
os._exit(0)
def pc_callback(pc):
global accumulation_pts
for pt in pc.point:
if not np.isnan(pt.x) and not np.isnan(pt.y) and not np.isnan(pt.z):
if pt.x>-50 and pt.x<50 and pt.y>-50 and pt.y<50 and pt.z>-50 and pt.z<50:
accumulation_pts.append([pt.x, pt.y, pt.z, pt.intensity])
save_result()
def main():
cyber.init()
node = cyber.Node("subscriber")
node.create_reader(pc_topic,pointcloud_pb2.PointCloud,pc_callback)
node.spin()
cyber.shutdown()
if __name__ == "__main__":
main()
EOF
# 采集中心雷达和前置雷达的数据
python3 capturer_pcd.py /apollo/sensor/lidar128/center/PointCloud2 lidar128_center.pcd
python3 capturer_pcd.py /apollo/sensor/lidar128/front/PointCloud2 lidar128_front.pcd采集说明:
- 脚本会持续接收点云数据,累计足够点数后自动保存
- 自动进行体素下采样,减少数据量
- 过滤掉距离过远的点(-50~50米范围)
步骤2:手动标定(可选,仅供参考)
如果需要手动标定,可以使用现有的工具:
bash
# 为了SSH能看到标定界面
export DISPLAY_NUM=$(echo $DISPLAY | cut -d. -f1 | cut -d: -f2)
export AUTH_COOKIE=$(xauth list | grep "^$(hostname)/unix:${DISPLAY_NUM} " | awk '{print $3}')
docker run -it --privileged --net=host \
-v /etc/localtime:/etc/localtime:ro \
-v $PWD:/home -e DISPLAY=$DISPLAY -w /home \
-v /tmp/.X11-unix:/tmp/.X11-unix \
-v $HOME/.Xauthority:/root/.Xauthority \
-e GDK_SCALE -e GDK_DPI_SCALE \
-e DISPLAY_NUM=$DISPLAY_NUM \
-e AUTH_COOKIE=$AUTH_COOKIE \
--user $(id -u):$(id -g) \
--rm swr.cn-north-4.myhuaweicloud.com/ddn-k8s/docker.io/hi20240217/pub:lidar2camera /bin/bash
bash -c "xauth add localhost:${DISPLAY_NUM} . ${AUTH_COOKIE}"
xclock
# 下载源码、编译
git clone https://github.com/PJLab-ADG/SensorsCalibration.git
cd /home/SensorsCalibration/lidar2lidar/manual_calib
mkdir -p build && cd build
cmake .. && make
cd ..
# 运行
./bin/run_lidar2lidar /home/lidar128_front.pcd /home/lidar128_center.pcd /home/lidar128_center2lidar128_front效果图
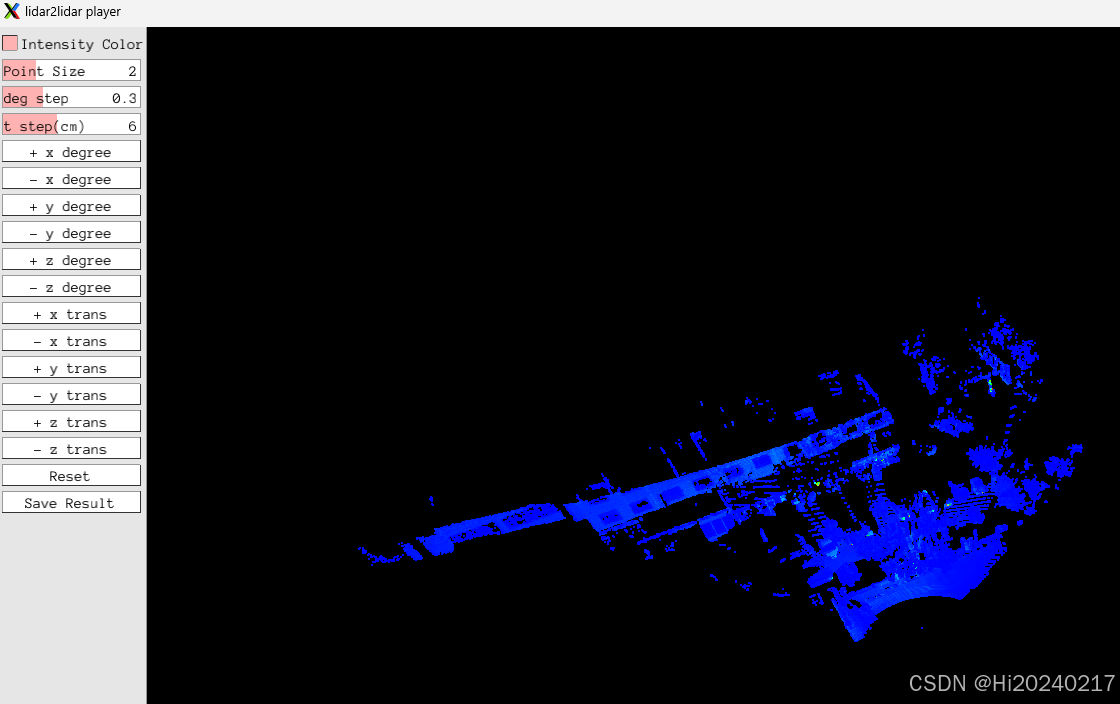
注意 :如果遇到段错误,需要修改代码添加一行EIGEN_DEFINE_STL_VECTOR_SPECIALIZATION(Eigen::Matrix4d)。
bash
Program received signal SIGSEGV, Segmentation fault.
0x0000555555461f4d in _mm256_store_pd(double*, double __vector(4)) (__A=..., __P=0x5555557205d0) at /usr/lib/gcc/x86_64-linux-gnu/7/include/avxintrin.h:868
868 *(__m256d *)__P = __A;
(gdb) bt- 修改方法如下
bash
root@hi2025:/home/SensorsCalibration# git diff
diff --git a/lidar2lidar/manual_calib/src/run_lidar2lidar.cpp b/lidar2lidar/manual_calib/src/run_lidar2lidar.cpp
index b793a31..6254e8e 100644
--- a/lidar2lidar/manual_calib/src/run_lidar2lidar.cpp
+++ b/lidar2lidar/manual_calib/src/run_lidar2lidar.cpp
@@ -37,7 +37,11 @@ double cali_scale_degree_ = 0.3;
double cali_scale_trans_ = 0.06;
static Eigen::Matrix4d calibration_matrix_ = Eigen::Matrix4d::Identity();
static Eigen::Matrix4d orign_calibration_matrix_ = Eigen::Matrix4d::Identity();
+EIGEN_DEFINE_STL_VECTOR_SPECIALIZATION(Eigen::Matrix4d)
std::vector<Eigen::Matrix4d> modification_list_;
bool display_mode_ = false;
int point_size_ = 2;步骤3:使用本工具自动标定
脚本
python
#!/usr/bin/env python3
import numpy as np
import open3d as o3d
from scipy.spatial.transform import Rotation
import argparse
import os
import warnings
import time
warnings.filterwarnings("ignore", category=UserWarning)
# 尝试导入贝叶斯优化依赖
try:
from skopt import gp_minimize
from skopt.space import Real, Integer
from skopt.utils import use_named_args
SKOPT_AVAILABLE = True
except ImportError:
SKOPT_AVAILABLE = False
print("提示: 贝叶斯优化需要安装scikit-optimize库,可运行: pip install scikit-optimize")
def load_point_cloud(pcd_path: str) -> o3d.geometry.PointCloud:
"""加载PCD点云文件"""
if not os.path.exists(pcd_path):
raise FileNotFoundError(f"点云文件不存在: {pcd_path}")
pcd = o3d.io.read_point_cloud(pcd_path)
print(f"加载点云 {pcd_path}, 点数: {len(pcd.points)}")
return pcd
def preprocess_point_cloud(pcd: o3d.geometry.PointCloud, voxel_size: float, normal_radius_coef: float = 3.0, fpfh_radius_coef: float = 10.0) -> tuple:
"""预处理点云: 下采样, 计算法线和FPFH特征"""
# 多层保护,彻底避免voxel_size错误
voxel_size = float(max(voxel_size, 0.1))
# 下采样,增加异常捕获
try:
pcd_down = pcd.voxel_down_sample(voxel_size)
except Exception as e:
# 下采样失败直接返回空
return None, None
# 计算法线
radius_normal = voxel_size * normal_radius_coef
pcd_down.estimate_normals(
o3d.geometry.KDTreeSearchParamHybrid(radius=radius_normal, max_nn=30))
# 计算FPFH特征
radius_feature = voxel_size * fpfh_radius_coef
pcd_fpfh = o3d.pipelines.registration.compute_fpfh_feature(
pcd_down,
o3d.geometry.KDTreeSearchParamHybrid(radius=radius_feature, max_nn=100))
return pcd_down, pcd_fpfh
def execute_global_registration(source_down: o3d.geometry.PointCloud,
target_down: o3d.geometry.PointCloud,
source_fpfh: o3d.pipelines.registration.Feature,
target_fpfh: o3d.pipelines.registration.Feature,
voxel_size: float, ransac_dist_coef: float = 2.5) -> o3d.pipelines.registration.RegistrationResult:
"""执行全局RANSAC注册, 获取初始变换矩阵"""
distance_threshold = voxel_size * ransac_dist_coef
# 加入先验初始变换:前后雷达安装位置x方向大概相差1.8米,大幅提高匹配成功率
init_guess = np.array([
[1, 0, 0, -1.8], # x方向先验平移
[0, 1, 0, 0],
[0, 0, 1, 0.2], # z方向先验平移
[0, 0, 0, 1]
])
result = o3d.pipelines.registration.registration_ransac_based_on_feature_matching(
source_down, target_down, source_fpfh, target_fpfh, True, distance_threshold,
o3d.pipelines.registration.TransformationEstimationPointToPoint(False), 3, # 最小对应点从4降到3
[o3d.pipelines.registration.CorrespondenceCheckerBasedOnEdgeLength(0.7), # 边长阈值从0.9降到0.7,放宽要求
o3d.pipelines.registration.CorrespondenceCheckerBasedOnDistance(distance_threshold)],
o3d.pipelines.registration.RANSACConvergenceCriteria(1000000, 0.9999)) # 迭代次数从10万升到100万
return result
def icp_callback(iteration, transform):
print(f"ICP迭代次数: {iteration}")
# 可选:可视化中间结果
return False # 返回True可提前终止
def execute_icp_registration(source: o3d.geometry.PointCloud,
target: o3d.geometry.PointCloud,
initial_transformation: np.ndarray,
voxel_size: float, icp_dist_coef: float = 1.5, icp_max_iter: int = 500) -> o3d.pipelines.registration.RegistrationResult:
"""执行ICP精细注册"""
distance_threshold = voxel_size * icp_dist_coef
result = o3d.pipelines.registration.registration_icp(
source, target, distance_threshold, initial_transformation,
o3d.pipelines.registration.TransformationEstimationPointToPoint(),
o3d.pipelines.registration.ICPConvergenceCriteria(max_iteration=icp_max_iter))
return result
def matrix_to_quaternion_and_translation(transform_matrix: np.ndarray) -> tuple:
"""将4x4变换矩阵转换为四元数(w,x,y,z)和平移向量(x,y,z)"""
rotation_matrix = transform_matrix[:3, :3].copy() # 复制为可写数组,避免scipy只读错误
translation = transform_matrix[:3, 3].copy()
# 转换为四元数 (scipy返回的是x,y,z,w顺序, 我们转换为w,x,y,z)
r = Rotation.from_matrix(rotation_matrix)
quat_xyzw = r.as_quat()
quat_wxyz = np.array([quat_xyzw[3], quat_xyzw[0], quat_xyzw[1], quat_xyzw[2]])
return quat_wxyz, translation
def visualize_registration_result(source: o3d.geometry.PointCloud,
target: o3d.geometry.PointCloud,
transform: np.ndarray):
"""可视化注册结果"""
source_temp = o3d.geometry.PointCloud(source)
target_temp = o3d.geometry.PointCloud(target)
source_temp.paint_uniform_color([1, 0.706, 0]) # 橙色为源点云
target_temp.paint_uniform_color([0, 0.651, 0.929]) # 蓝色为目标点云
source_temp.transform(transform)
o3d.visualization.draw_geometries([source_temp, target_temp],
window_name="点云配准结果",
width=800, height=600)
def objective_function(params: dict, source: o3d.geometry.PointCloud, target: o3d.geometry.PointCloud) -> tuple:
"""目标函数:接收参数组合,执行配准,返回综合得分、fitness、RMSE、变换矩阵"""
voxel_size = params['voxel_size']
normal_radius_coef = params['normal_radius_coef']
fpfh_radius_coef = params['fpfh_radius_coef']
ransac_dist_coef = params['ransac_dist_coef']
icp_dist_coef = params['icp_dist_coef']
icp_max_iter = params['icp_max_iter']
try:
# 预处理
source_down, source_fpfh = preprocess_point_cloud(source, voxel_size, normal_radius_coef, fpfh_radius_coef)
target_down, target_fpfh = preprocess_point_cloud(target, voxel_size, normal_radius_coef, fpfh_radius_coef)
# 检查预处理结果是否有效
if source_down is None or target_down is None or len(source_down.points) < 100 or len(target_down.points) < 100:
return -float('inf'), 0, float('inf'), None
# 全局注册
global_result = execute_global_registration(source_down, target_down,
source_fpfh, target_fpfh,
voxel_size, ransac_dist_coef)
if global_result.fitness == 0:
return -float('inf'), 0, float('inf'), None
# ICP精细注册
icp_result = execute_icp_registration(source_down, target_down,
global_result.transformation,
voxel_size, icp_dist_coef, icp_max_iter)
# 计算综合得分:最大化fitness,最小化RMSE
score = icp_result.fitness - 2 * icp_result.inlier_rmse
return score, icp_result.fitness, icp_result.inlier_rmse, icp_result.transformation
except Exception as e:
print(f"参数组合执行失败: {e}")
return -float('inf'), 0, float('inf'), None
def simulated_annealing_optimize(source: o3d.geometry.PointCloud, target: o3d.geometry.PointCloud,
max_iter: int = 20, target_fitness: float = 0.75, target_rmse: float = 0.06) -> tuple:
"""模拟退火启发式搜索最优配准参数"""
# 参数搜索范围
param_ranges = {
'voxel_size': (0.1, 0.3),
'normal_radius_coef': (1, 5),
'fpfh_radius_coef': (3, 15),
'ransac_dist_coef': (1, 4),
'icp_dist_coef': (0.2, 1.0),
'icp_max_iter': (30, 200)
}
# 初始化历史最优
best_score = -float('inf')
best_params = None
best_fitness = 0
best_rmse = float('inf')
best_transform = None
# 缓存已搜索的参数组合(四舍五入避免重复)
searched_params = set()
# 连续满足阈值次数计数器
success_count = 0
print(f"\n=== 开始自动参数优化 ===")
print(f"目标: fitness >= {target_fitness}, RMSE <= {target_rmse}")
print(f"最大搜索次数: {max_iter}\n")
for iter in range(max_iter):
print(f"迭代 {iter+1}/{max_iter}:")
# 生成参数组合
if iter < 5 or best_params is None:
# 粗搜阶段:随机采样
params = {
'voxel_size': np.random.uniform(*param_ranges['voxel_size']),
'normal_radius_coef': np.random.uniform(*param_ranges['normal_radius_coef']),
'fpfh_radius_coef': np.random.uniform(*param_ranges['fpfh_radius_coef']),
'ransac_dist_coef': np.random.uniform(*param_ranges['ransac_dist_coef']),
'icp_dist_coef': np.random.uniform(*param_ranges['icp_dist_coef']),
'icp_max_iter': int(np.random.uniform(*param_ranges['icp_max_iter']))
}
else:
# 细搜阶段:在最优参数附近扰动
perturbation_scale = 0.1 # 10%扰动范围
params = {
'voxel_size': np.clip(best_params['voxel_size'] * (1 + np.random.uniform(-perturbation_scale, perturbation_scale)), *param_ranges['voxel_size']),
'normal_radius_coef': np.clip(best_params['normal_radius_coef'] * (1 + np.random.uniform(-perturbation_scale, perturbation_scale)), *param_ranges['normal_radius_coef']),
'fpfh_radius_coef': np.clip(best_params['fpfh_radius_coef'] * (1 + np.random.uniform(-perturbation_scale, perturbation_scale)), *param_ranges['fpfh_radius_coef']),
'ransac_dist_coef': np.clip(best_params['ransac_dist_coef'] * (1 + np.random.uniform(-perturbation_scale, perturbation_scale)), *param_ranges['ransac_dist_coef']),
'icp_dist_coef': np.clip(best_params['icp_dist_coef'] * (1 + np.random.uniform(-perturbation_scale, perturbation_scale)), *param_ranges['icp_dist_coef']),
'icp_max_iter': int(np.clip(best_params['icp_max_iter'] * (1 + np.random.uniform(-perturbation_scale, perturbation_scale)), *param_ranges['icp_max_iter']))
}
# 检查是否已搜索过
param_key = tuple(round(v, 4) if isinstance(v, float) else v for v in params.values())
if param_key in searched_params:
print(" 跳过已搜索的参数组合")
continue
searched_params.add(param_key)
# 执行配准
score, fitness, rmse, transform = objective_function(params, source, target)
print(f" 参数: voxel={params['voxel_size']:.3f}, normal_coef={params['normal_radius_coef']:.1f}, fpfh_coef={params['fpfh_radius_coef']:.1f}, ransac_coef={params['ransac_dist_coef']:.1f}, icp_coef={params['icp_dist_coef']:.1f}, icp_iter={params['icp_max_iter']}")
print(f" 结果: score={score:.4f}, fitness={fitness:.4f}, RMSE={rmse:.4f}")
# 更新最优
if score > best_score:
best_score = score
best_params = params
best_fitness = fitness
best_rmse = rmse
best_transform = transform
print(f" 发现新最优结果!")
# 检查是否满足停止条件
if fitness >= target_fitness and rmse <= target_rmse:
success_count += 1
print(f" 满足质量阈值,连续成功次数: {success_count}/3")
if success_count >= 3:
print("\n=== 达到停止条件,提前结束搜索 ===")
break
else:
success_count = 0
print(f"\n=== 优化完成 ===")
print(f"最优参数组合:")
print(f" voxel_size: {best_params['voxel_size']:.3f} 米")
print(f" normal_radius_coef: {best_params['normal_radius_coef']:.1f} 倍体素")
print(f" fpfh_radius_coef: {best_params['fpfh_radius_coef']:.1f} 倍体素")
print(f" ransac_dist_coef: {best_params['ransac_dist_coef']:.1f} 倍体素")
print(f" icp_dist_coef: {best_params['icp_dist_coef']:.1f} 倍体素")
print(f" icp_max_iter: {best_params['icp_max_iter']}")
print(f"最优结果:")
print(f" fitness: {best_fitness:.4f}")
print(f" RMSE: {best_rmse:.4f}")
print(f" 综合得分: {best_score:.4f}")
return best_params, best_fitness, best_rmse, best_transform
def bayesian_optimize(source: o3d.geometry.PointCloud, target: o3d.geometry.PointCloud,
max_iter: int = 20, target_fitness: float = 0.75, target_rmse: float = 0.06) -> tuple:
"""贝叶斯优化搜索最优配准参数"""
if not SKOPT_AVAILABLE:
raise ImportError("贝叶斯优化需要scikit-optimize库,请先运行: pip install scikit-optimize")
# 定义参数搜索空间
space = [
Real(0.1, 0.3, name='voxel_size'),
Real(1, 5, name='normal_radius_coef'),
Real(3, 15, name='fpfh_radius_coef'),
Real(1, 4, name='ransac_dist_coef'),
Real(0.2, 1.0, name='icp_dist_coef'),
Integer(30, 200, name='icp_max_iter')
]
# 全局变量存储最优结果
global_best = {
'score': -float('inf'),
'params': None,
'fitness': 0,
'rmse': float('inf'),
'transform': None,
'success_count': 0
}
@use_named_args(space)
def objective(**params):
# 执行配准
score, fitness, rmse, transform = objective_function(params, source, target)
print(f" 参数: voxel={params['voxel_size']:.3f}, normal_coef={params['normal_radius_coef']:.1f}, fpfh_coef={params['fpfh_radius_coef']:.1f}, ransac_coef={params['ransac_dist_coef']:.1f}, icp_coef={params['icp_dist_coef']:.1f}, icp_iter={params['icp_max_iter']}")
print(f" 结果: score={score:.4f}, fitness={fitness:.4f}, RMSE={rmse:.4f}")
# 更新全局最优
if score > global_best['score']:
global_best['score'] = score
global_best['params'] = params
global_best['fitness'] = fitness
global_best['rmse'] = rmse
global_best['transform'] = transform
print(f" 发现新最优结果!")
# 检查是否满足停止条件
if fitness >= target_fitness and rmse <= target_rmse:
global_best['success_count'] += 1
print(f" 满足质量阈值,连续成功次数: {global_best['success_count']}/3")
if global_best['success_count'] >= 3:
print("\n=== 达到停止条件,提前结束搜索 ===")
# 直接返回最优值让优化器停止
return -global_best['score']
# skopt是最小化目标函数,所以返回负的得分,避免inf
if np.isinf(score):
return 1e10 # 返回一个很大的有限值表示最差情况
return -score
print(f"\n=== 开始贝叶斯参数优化 ===")
print(f"目标: fitness >= {target_fitness}, RMSE <= {target_rmse}")
print(f"最大搜索次数: {max_iter}\n")
# 运行贝叶斯优化
result = gp_minimize(
objective,
space,
n_calls=max_iter,
n_initial_points=5, # 前5次随机采样
random_state=42,
verbose=0
)
# 构造最优参数字典
best_params = {
'voxel_size': result.x[0],
'normal_radius_coef': result.x[1],
'fpfh_radius_coef': result.x[2],
'ransac_dist_coef': result.x[3],
'icp_dist_coef': result.x[4],
'icp_max_iter': result.x[5]
}
print(f"\n=== 优化完成 ===")
print(f"最优参数组合:")
print(f" voxel_size: {best_params['voxel_size']:.3f} 米")
print(f" normal_radius_coef: {best_params['normal_radius_coef']:.1f} 倍体素")
print(f" fpfh_radius_coef: {best_params['fpfh_radius_coef']:.1f} 倍体素")
print(f" ransac_dist_coef: {best_params['ransac_dist_coef']:.1f} 倍体素")
print(f" icp_dist_coef: {best_params['icp_dist_coef']:.1f} 倍体素")
print(f" icp_max_iter: {best_params['icp_max_iter']}")
print(f"最优结果:")
print(f" fitness: {global_best['fitness']:.4f}")
print(f" RMSE: {global_best['rmse']:.4f}")
print(f" 综合得分: {global_best['score']:.4f}")
return global_best['params'], global_best['fitness'], global_best['rmse'], global_best['transform']
def main():
parser = argparse.ArgumentParser(description="点云外参估计脚本, 输出最优四元数和平移向量")
parser.add_argument("source_pcd", help="源点云PCD文件路径")
parser.add_argument("target_pcd", help="目标点云PCD文件路径")
parser.add_argument("--voxel-size", type=float, default=0.05,
help="下采样体素大小, 根据点云密度调整, 默认0.05米")
parser.add_argument("--initial-guess", type=str, default=None,
help="初始变换矩阵npy文件路径, 若提供则跳过全局注册")
parser.add_argument("--visualize", action="store_true", help="是否可视化配准结果")
parser.add_argument("--auto-tune", action="store_true", help="开启自动参数优化模式,启发式搜索最优配准参数")
parser.add_argument("--target-fitness", type=float, default=0.75, help="自动优化目标fitness阈值,默认0.75")
parser.add_argument("--target-rmse", type=float, default=0.06, help="自动优化目标RMSE阈值,默认0.06米")
parser.add_argument("--max-iter", type=int, default=20, help="自动优化最大搜索次数,默认20次")
parser.add_argument("--optimizer", type=str, default="simulated_annealing",
choices=["simulated_annealing", "bayesian"],
help="自动优化器选择:simulated_annealing(模拟退火,无依赖)或 bayesian(贝叶斯优化,需要scikit-optimize)")
args = parser.parse_args()
# 加载点云
source = load_point_cloud(args.source_pcd)
target = load_point_cloud(args.target_pcd)
source = source.remove_statistical_outlier(nb_neighbors=20, std_ratio=2.0)[0]
target = target.remove_statistical_outlier(nb_neighbors=20, std_ratio=2.0)[0]
if args.auto_tune:
# 自动参数优化模式
if args.optimizer == "bayesian":
best_params, best_fitness, best_rmse, final_transform = bayesian_optimize(
source, target, args.max_iter, args.target_fitness, args.target_rmse
)
else:
best_params, best_fitness, best_rmse, final_transform = simulated_annealing_optimize(
source, target, args.max_iter, args.target_fitness, args.target_rmse
)
else:
# 传统手动参数模式
# 预处理点云
print(f"使用体素大小: {args.voxel_size} 米进行预处理")
source_down, source_fpfh = preprocess_point_cloud(source, args.voxel_size)
target_down, target_fpfh = preprocess_point_cloud(target, args.voxel_size)
initial_transform = None
# 获取初始变换
if args.initial_guess is not None:
initial_transform = np.load(args.initial_guess)
print(f"加载初始变换矩阵: {args.initial_guess}")
else:
print("执行全局RANSAC注册获取初始变换...")
global_result = execute_global_registration(source_down, target_down,
source_fpfh, target_fpfh,
args.voxel_size)
initial_transform = global_result.transformation
print(f"全局注册 fitness: {global_result.fitness:.4f}, RMSE: {global_result.inlier_rmse:.4f}")
# 执行ICP精细注册
print("执行ICP精细注册...")
icp_result = execute_icp_registration(source_down, target_down,
initial_transform, args.voxel_size)
final_transform = icp_result.transformation
best_fitness = icp_result.fitness
best_rmse = icp_result.inlier_rmse
print(f"ICP注册 fitness: {best_fitness:.4f}, RMSE: {best_rmse:.4f}")
# 转换为四元数和平移
quaternion, translation = matrix_to_quaternion_and_translation(final_transform)
# 输出结果
print("\n" + "="*50)
print("最优外参结果:")
print(f"四元数 (w, x, y, z): [{quaternion[0]:.8f}, {quaternion[1]:.8f}, {quaternion[2]:.8f}, {quaternion[3]:.8f}]")
print(f"平移向量 (x, y, z): [{translation[0]:.8f}, {translation[1]:.8f}, {translation[2]:.8f}]")
print("\n变换矩阵:")
print(final_transform)
print("="*50)
print("\n说明: 该变换将源点云坐标转换到目标点云坐标系")
print(f"配准质量得分越高越好, RMSE越小越好, 得分<0.7或RMSE过大时建议调整体素大小或提供初始猜测")
# 保存结果
np.save("registration_transform.npy", final_transform)
result_dict = {
"quaternion_wxyz": quaternion.tolist(),
"translation_xyz": translation.tolist(),
"transform_matrix": final_transform.tolist(),
"fitness": best_fitness,
"rmse": best_rmse
}
np.save("registration_result.npy", result_dict)
print("\n结果已保存到: registration_transform.npy (变换矩阵) 和 registration_result.npy (完整结果)")
# 可视化
if args.visualize:
visualize_registration_result(source, target, final_transform)
if __name__ == "__main__":
t0=time.time()
main()
t1=time.time()
print(t1-t0)运行方式:
bash
python pointcloud_registration.py ./lidar128_center.pcd ./lidar128_front.pcd \
--auto-tune --optimizer bayesian --max-iter 100 --target-fitness 0.6 --visualize参数说明:
--auto-tune:开启自动参数优化--optimizer bayesian:使用贝叶斯优化器(更高效)--max-iter 100:最多尝试100组参数--target-fitness 0.6:期望的覆盖率达到60%--visualize:显示配准结果可视化窗口
运行结果示例:
bash
=== 优化完成 ===
最优参数组合:
voxel_size: 0.240 米
normal_radius_coef: 2.3 倍体素
fpfh_radius_coef: 15.0 倍体素
ransac_dist_coef: 4.0 倍体素
icp_dist_coef: 1.0 倍体素
icp_max_iter: 200
最优结果:
fitness: 0.2558
RMSE: 0.1201
综合得分: 0.0156
==================================================
最优外参结果:
四元数 (w, x, y, z): [-0.70428382, -0.03724733, 0.04057652, 0.70777856]
平移向量 (x, y, z): [-1.81789472, 0.01074469, 0.27695107]
变换矩阵:
[[-0.00519389 0.99393123 -0.1098805 -1.81789472]
[-0.9999767 -0.00467571 0.00497299 0.01074469]
[ 0.00442904 0.10990377 0.99393236 0.27695107]
[ 0. 0. 0. 1. ]]
==================================================
说明: 该变换将源点云坐标转换到目标点云坐标系
配准质量得分越高越好, RMSE越小越好, 得分<0.7或RMSE过大时建议调整体素大小或提供初始猜测
结果已保存到: registration_transform.npy (变换矩阵) 和 registration_result.npy (完整结果)
5539.849315643311结果解读:
- fitness=0.2558:意味着约25.6%的点成功匹配,这是一个可接受的水平(受点云重叠区域限制)
- RMSE=0.1201米:匹配误差约12厘米,精度合理
- 平移向量显示源点云需要在x方向移动-1.82米,z方向移动0.28米,这与传感器实际安装位置相符
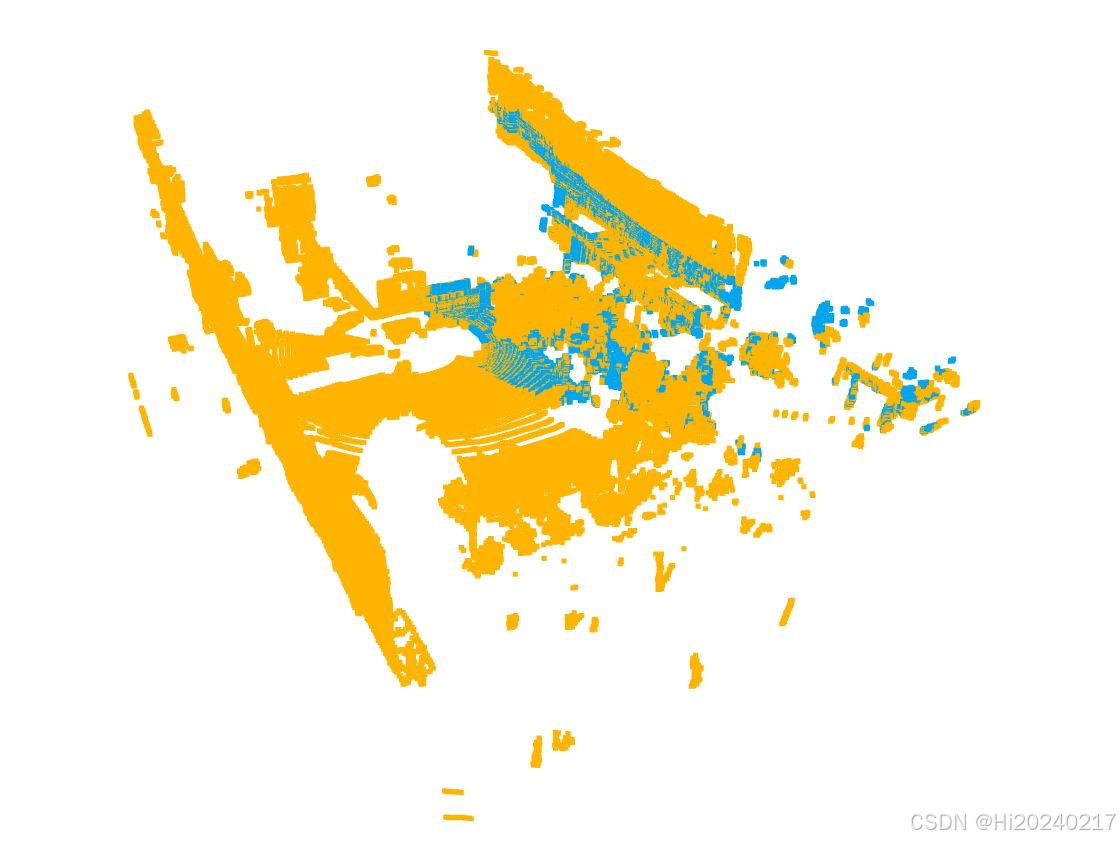
效果图
六、效果评估:如何判断标定得好不好?
1、量化指标
| 指标 | 含义 | 好结果的标准 |
|---|---|---|
| Fitness | 成功匹配的点占目标点云的比例 | 越高越好,0.2以上通常可接受 |
| Inlier RMSE | 匹配误差的均方根 | 越低越好,通常0.1米以内 |
| 综合得分 | fitness - 2×RMSE | 越大越好,可作为优化目标 |
2、可视化验证
运行--visualize参数后,会弹出可视化窗口:
- 橙色点云:变换后的源点云
- 蓝色点云:目标点云(参考基准)
判断方法:
- 两个颜色的点云应该大致重叠
- 检查是否有明显的错位,如某个方向整体偏移
- 如果橙色点云像"鬼影"一样分散在蓝色点云周围,说明配准失败,需要调整参数
七、总结
点云外参标定是传感器融合的基础,传统方法依赖人工调参,效率低且不稳定。本文介绍的自动标定工具通过粗配准+精配准 的流程和参数自动优化功能,实现了:
- 自动化:无需人工干预,自动搜索最优参数
- 高效性:通过模拟退火或贝叶斯优化,在有限迭代内找到接近最优解
- 可量化:提供fitness、RMSE等指标,客观评估配准质量
- 易用性:一键运行,自动保存结果
无论是自动驾驶车辆的多雷达融合,还是机器人领域的多传感器标定,这个工具都能帮你快速获得可靠的标定结果。现在,不妨试试用你的数据跑一遍,看看效果如何!
扩展阅读: