目录
[1.1 硬件清单](#1.1 硬件清单)
[1.2 接线方案表](#1.2 接线方案表)
[1.3 具体接线图](#1.3 具体接线图)
[1.4 接线实物图](#1.4 接线实物图)
[3.1 初始化与寄存器组切换](#3.1 初始化与寄存器组切换)
[3.2 姿态解算与磁场融合](#3.2 姿态解算与磁场融合)
[3.3 滤波器收敛检测](#3.3 滤波器收敛检测)
[3.4 双协议并行输出](#3.4 双协议并行输出)
[3.5 项目完整代码](#3.5 项目完整代码)
[4.1 操作流程](#4.1 操作流程)
[4.2 上位机搭建](#4.2 上位机搭建)
[4.3 视频演示](#4.3 视频演示)
[5.1 ICM20948内部架构](#5.1 ICM20948内部架构)
[5.2 I2C通信与寄存器Bank机制](#5.2 I2C通信与寄存器Bank机制)
项目概述
本项目以零知增强板 为核心控制平台,主控芯片为STM32F407VET6,采集三轴加速度、三轴陀螺仪和三轴磁力计的原始数据。结合优化的Mahony互补滤波算法,实时解算出绝对姿态角。为了实现高效的数据采集与分析,实现了双协议并行输出,将姿态数据同时传输给VOFA+上位机进行实时波形显示,并自动记录到Excel中,为后续的数据分析与算法优化提供了极大便利
项目难点及解决方案
问题描述:磁力计初始化模式错误导致Yaw持续漂移
**解决方案:**先向寄存器写入0x00的Power-down模式等待复位,再写入0x06进行100Hz连续测量模式,Yaw角得以正常收敛
一、系统接线部分
1.1 硬件清单
| 序号 | 模块名称 | 规格 / 型号 | 数量 | 备注 |
|---|---|---|---|---|
| 1 | 零知增强板 | STM32F407VET6,主频168MHz | 1 | 项目主控 |
| 2 | ICM20948 模块 | 九轴IMU,I²C/SPI接口 | 1 | 姿态传感器 |
| 3 | USB 数据线 | Micro-USB | 1 | 烧录 & 串口通信 |
| 4 | 杜邦线 | 2.0端子转公头,20cm | 1 | I²C连接 |
| 5 | PC | Windows 10/11 | 1 | 上位机运行环境 |
1.2 接线方案表
本项目使用硬件I2C进行通信。ADO引脚接高电平,设备地址为
0x69。请严格按照以下引脚定义进行连接
| ICM20948 引脚 | 信号功能 | 零知增强板引脚 | 说明 |
|---|---|---|---|
| VCC | 电源正 | 3.3V | 必须接3.3V,禁止接5V |
| SDA | I²C 数据 | SDA(20) | 硬件I²C1-SDA,对应Arduino Pin A4 |
| SCL | I²C 时钟 | SCL(21) | 硬件I²C1-SCL,对应Arduino Pin A5 |
| GND | 电源地 | GND | 与主板共地 |
| ADO | 地址选择 | 3.3V | 接高电平 → 设备地址 = 0x69 |
| INT | 数据就绪中断 | 悬空 | 本项目使用软件轮询,不接 |
1.3 具体接线图
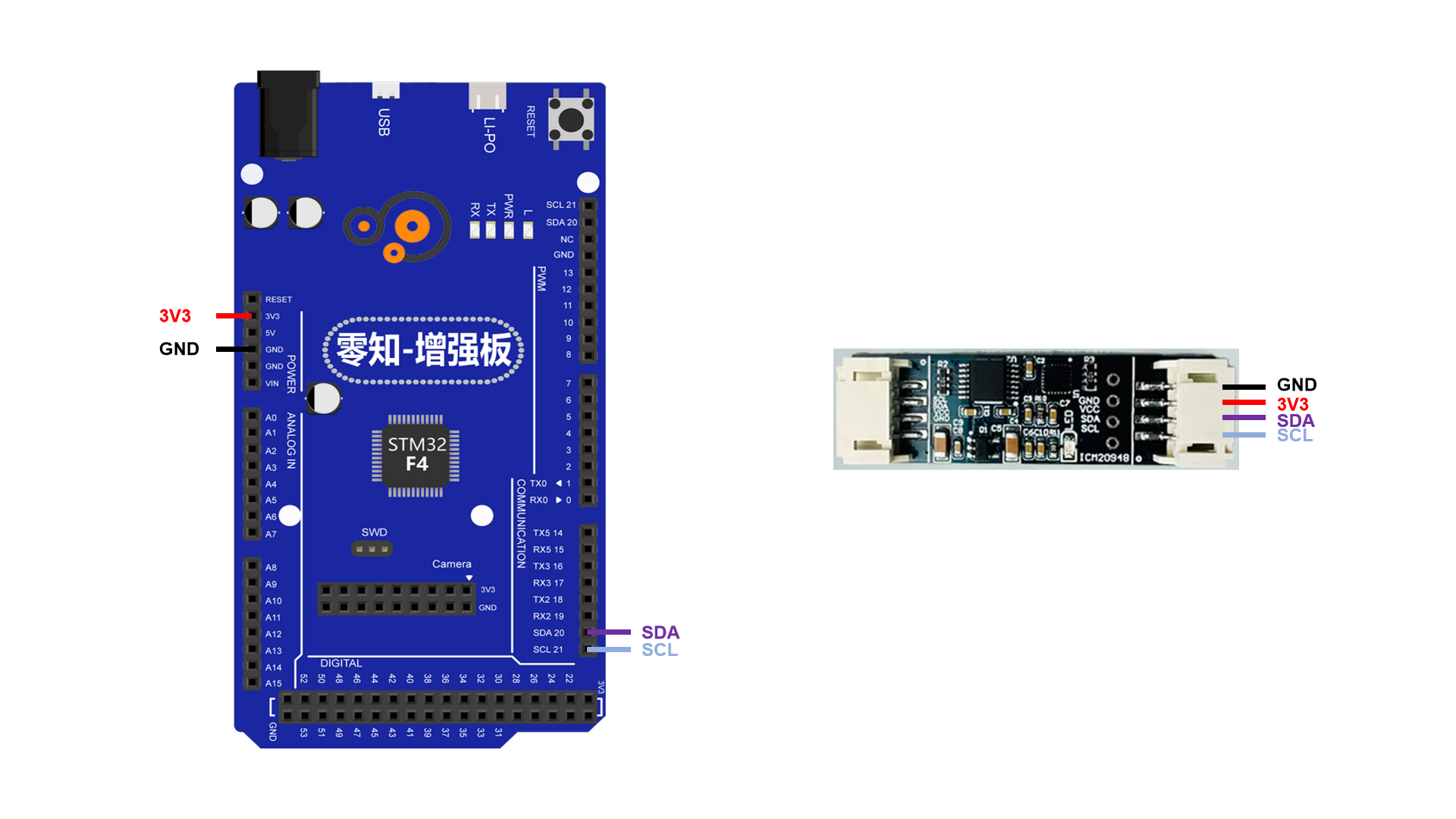
VCC接零知增强板3.3V逻辑电平,避免损坏芯片
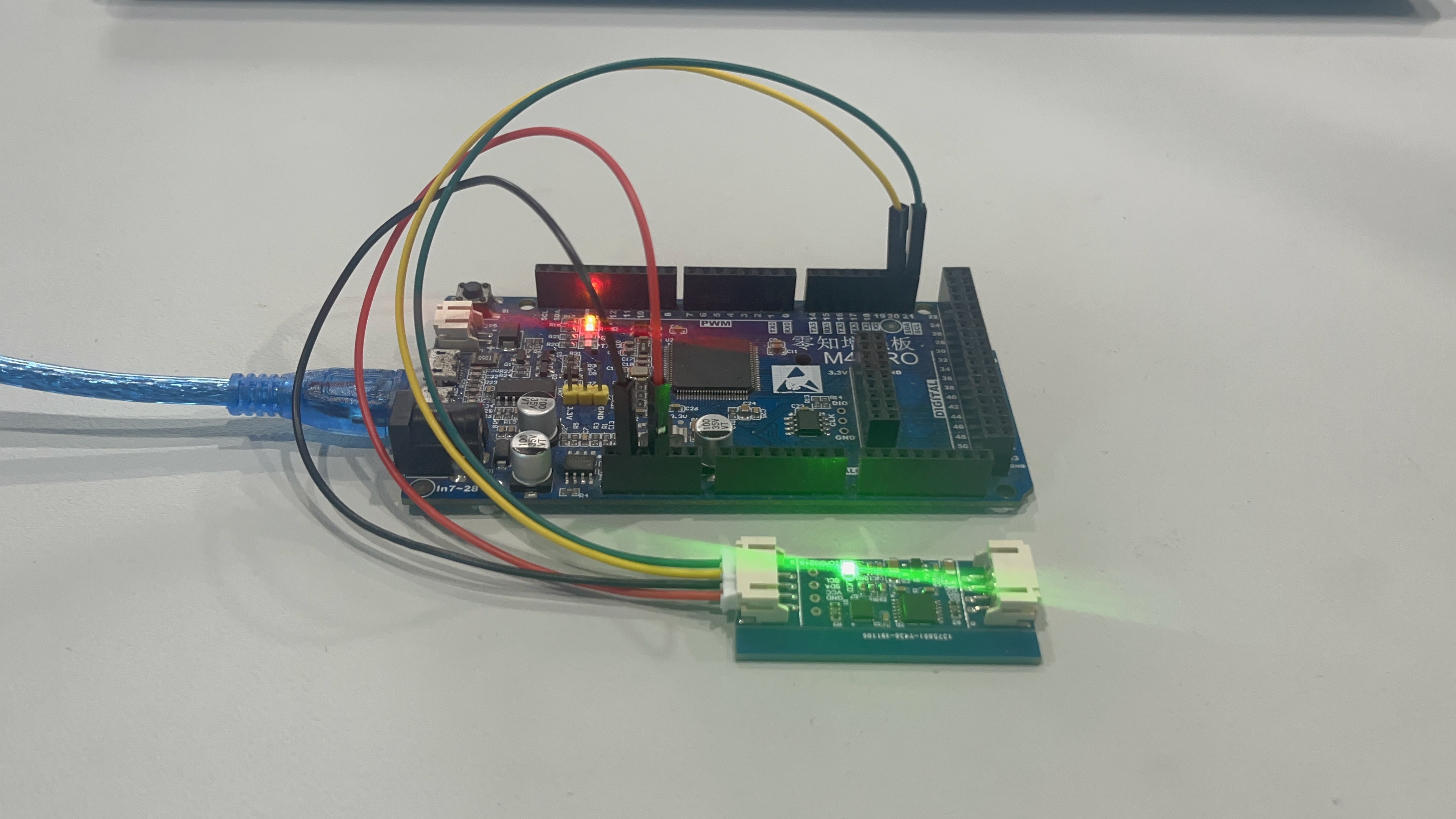
1.4 接线实物图
二、安装与使用部分
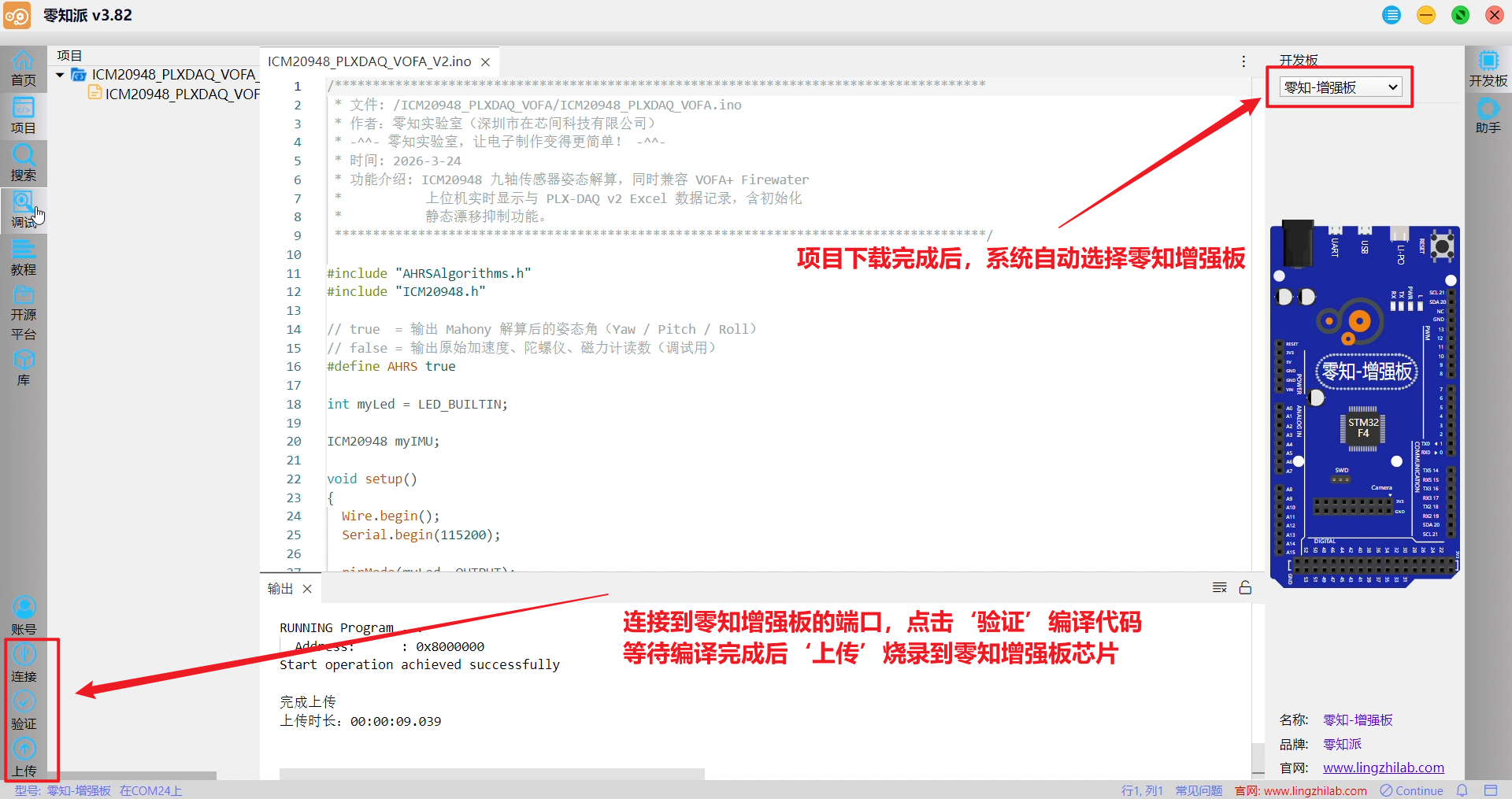
2.1 开源平台-输入"ICM20948九轴姿态角解算"并搜索-代码下载自动打开

2.2 连接-验证-上传
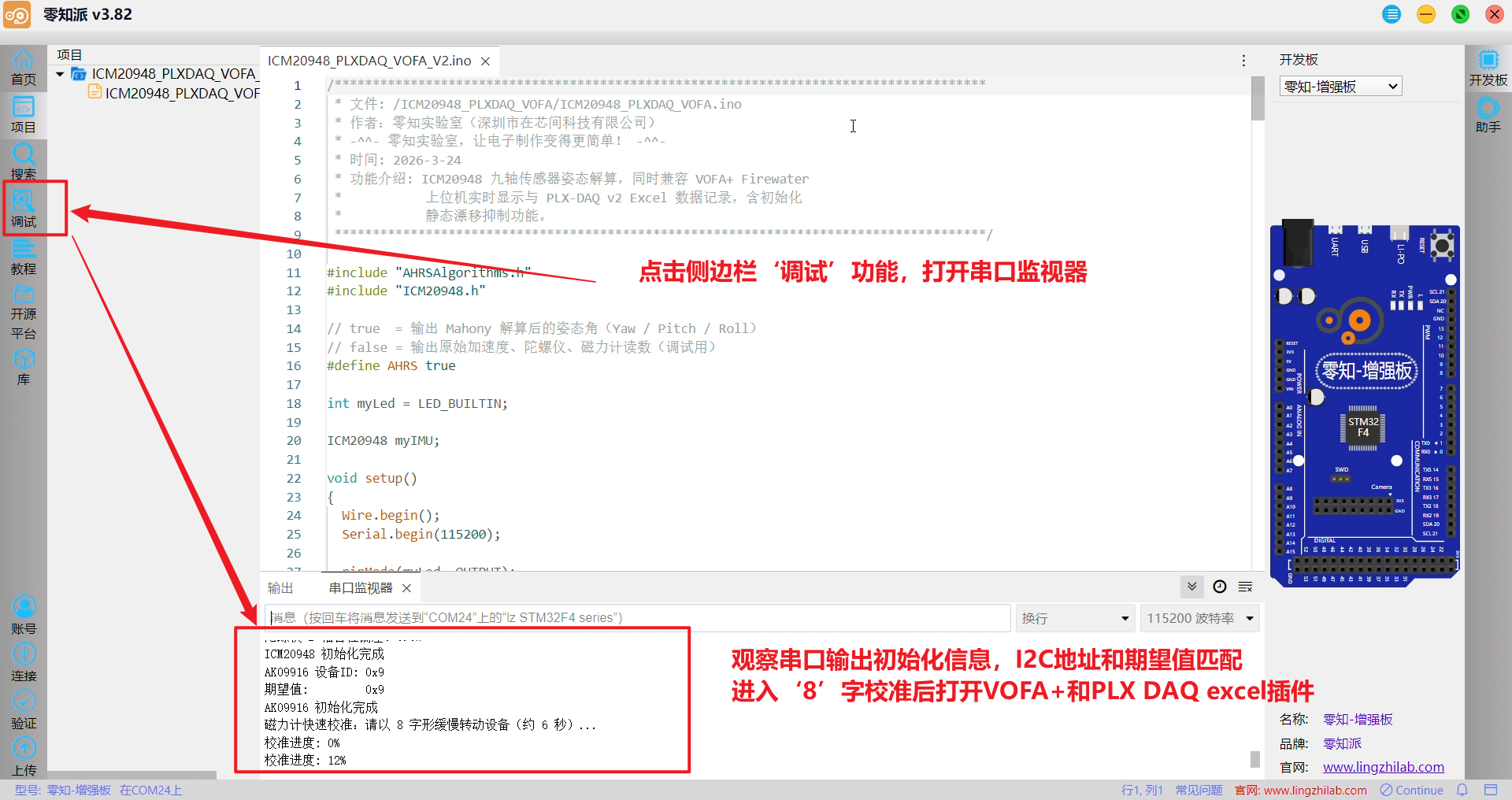
2.3 调试-串口监视器
三、核心代码讲解
本项目代码由三个核心文件由传感器驱动库、姿态解算库、主程序初始化和数据输出组成。以下重点讲解四个核心部分
3.1 初始化与寄存器组切换
ICM20948内部寄存器分为4个User Bank(Bank0~3)。每次访问不同Bank的寄存器前,必须通过地址
0x7F(REG_BANK_SEL)切换当前Bank
cpp
void ICM20948::initICM20948()
{
// Get stable time source
// Auto select clock source to be PLL gyroscope reference if ready else
writeByte(ICM20948_ADDRESS, PWR_MGMT_1, 0x01);
delay(200);
// Switch to user bank 2
writeByte(ICM20948_ADDRESS, REG_BANK_SEL, 0x20);
// Configure Gyro and Thermometer
// Disable FSYNC and set gyro bandwidth to 51.2 Hz,
// respectively;
// minimum delay time for this setting is 5.9 ms, which means sensor fusion
// update rates cannot be higher than 1 / 0.0059 = 170 Hz
// DLPF_CFG = bits 2:0 = 011; this limits the sample rate to 1000 Hz for both
// With the ICM20948, it is possible to get gyro sample rates of 32 kHz (!),
// 8 kHz, or 1 kHz
// Set gyroscope full scale range to 250 dps
writeByte(ICM20948_ADDRESS, ACCEL_CONFIG_2, 0x01); // 启用加速度计DLPF
writeByte(ICM20948_ADDRESS, GYRO_CONFIG_1, 0x01);
writeByte(ICM20948_ADDRESS, TEMP_CONFIG, 0x03);
// Set sample rate = gyroscope output rate/(1 + GYRO_SMPLRT_DIV)
// Use a 220 Hz rate; a rate consistent with the filter update rate
// determined inset in CONFIG above.
writeByte(ICM20948_ADDRESS, GYRO_SMPLRT_DIV, 0x07);
// Set gyroscope full scale range
// Range selects FS_SEL and AFS_SEL are 0 - 3, so 2-bit values are
// left-shifted into positions 4:3
// Set accelerometer full-scale range configuration
// Get current ACCEL_CONFIG register value
uint8_t c = readByte(ICM20948_ADDRESS, ACCEL_CONFIG);
// c = c & ~0xE0; // Clear self-test bits [7:5]
c = c & ~0x06; // Clear AFS bits [4:3]
c = c | Ascale << 1; // Set full scale range for the accelerometer
c = c | 0x01; // Set enable accel DLPF for the accelerometer
c = c | 0x18; // and set DLFPFCFG to 50.4 hz
// Write new ACCEL_CONFIG register value
writeByte(ICM20948_ADDRESS, ACCEL_CONFIG, c);
// Set accelerometer sample rate configuration
// It is possible to get a 4 kHz sample rate from the accelerometer by
// choosing 1 for accel_fchoice_b bit [3]; in this case the bandwidth is
// 1.13 kHz
writeByte(ICM20948_ADDRESS, ACCEL_SMPLRT_DIV_2, 0x07);
// The accelerometer, gyro, and thermometer are set to 1 kHz sample rates,
// but all these rates are further reduced by a factor of 5 to 200 Hz because
// of the GYRO_SMPLRT_DIV setting
// Switch to user bank 0
writeByte(ICM20948_ADDRESS, REG_BANK_SEL, 0x00);
// Configure Interrupts and Bypass Enable
// Set interrupt pin active high, push-pull, hold interrupt pin level HIGH
// until interrupt cleared, clear on read of INT_STATUS, and enable
// I2C_BYPASS_EN so additional chips can join the I2C bus and all can be
// controlled by the Arduino as master.
writeByte(ICM20948_ADDRESS, INT_PIN_CFG, 0x22);
// Enable data ready (bit 0) interrupt
writeByte(ICM20948_ADDRESS, INT_ENABLE_1, 0x01);
}参数说明:
| 寄存器 | 写入值 | 含义 |
|---|---|---|
REG_BANK_SEL (0x7F) |
0x00/0x10/0x20/0x30 |
切换到Bank0/1/2/3 |
GYRO_SMPLRT_DIV |
0x07 |
陀螺仪采样率分频 = 8,实际输出速率 = 1kHz/(1+7) = 125Hz |
GYRO_CONFIG_1 |
0x01 |
Bit0=1使能DLPF,进行低通滤波 |
ACCEL_CONFIG |
`0x01 | Ascale<<1 |
3.2 姿态解算与磁场融合
Mahony算法是一种高效的互补滤波器,它使用陀螺仪积分跟踪快速姿态变化,同时用加速度计和磁力计对长期漂移进行修正
cpp
void MahonyQuaternionUpdate(float ax, float ay, float az, float gx, float gy, float gz, float mx, float my, float mz, float deltat)
{
// short name local variable for readability
float q1 = q[0], q2 = q[1], q3 = q[2], q4 = q[3];
float norm;
float hx, hy, bx, bz;
float vx, vy, vz, wx, wy, wz;
float ex, ey, ez;
float pa, pb, pc;
// Auxiliary variables to avoid repeated arithmetic
float q1q1 = q1 * q1;
float q1q2 = q1 * q2;
float q1q3 = q1 * q3;
float q1q4 = q1 * q4;
float q2q2 = q2 * q2;
float q2q3 = q2 * q3;
float q2q4 = q2 * q4;
float q3q3 = q3 * q3;
float q3q4 = q3 * q4;
float q4q4 = q4 * q4;
// Normalise accelerometer measurement
norm = sqrt(ax * ax + ay * ay + az * az);
if (norm == 0.0f) return; // Handle NaN
norm = 1.0f / norm; // Use reciprocal for division
ax *= norm;
ay *= norm;
az *= norm;
// Normalise magnetometer measurement
norm = sqrt(mx * mx + my * my + mz * mz);
if (norm == 0.0f) return; // Handle NaN
norm = 1.0f / norm; // Use reciprocal for division
mx *= norm;
my *= norm;
mz *= norm;
// Reference direction of Earth's magnetic field
hx = 2.0f * mx * (0.5f - q3q3 - q4q4) + 2.0f * my * (q2q3 - q1q4) + 2.0f * mz * (q2q4 + q1q3);
hy = 2.0f * mx * (q2q3 + q1q4) + 2.0f * my * (0.5f - q2q2 - q4q4) + 2.0f * mz * (q3q4 - q1q2);
bx = sqrt((hx * hx) + (hy * hy));
bz = 2.0f * mx * (q2q4 - q1q3) + 2.0f * my * (q3q4 + q1q2) + 2.0f * mz * (0.5f - q2q2 - q3q3);
// Estimated direction of gravity and magnetic field
vx = 2.0f * (q2q4 - q1q3);
vy = 2.0f * (q1q2 + q3q4);
vz = q1q1 - q2q2 - q3q3 + q4q4;
wx = 2.0f * bx * (0.5f - q3q3 - q4q4) + 2.0f * bz * (q2q4 - q1q3);
wy = 2.0f * bx * (q2q3 - q1q4) + 2.0f * bz * (q1q2 + q3q4);
wz = 2.0f * bx * (q1q3 + q2q4) + 2.0f * bz * (0.5f - q2q2 - q3q3);
// Error is cross product between estimated direction and measured direction of gravity
ex = (ay * vz - az * vy) + (my * wz - mz * wy);
ey = (az * vx - ax * vz) + (mz * wx - mx * wz);
ez = (ax * vy - ay * vx) + (mx * wy - my * wx);
if (Ki > 0.0f)
{
eInt[0] += ex; // accumulate integral error
eInt[1] += ey;
eInt[2] += ez;
}
else
{
eInt[0] = 0.0f; // prevent integral wind up
eInt[1] = 0.0f;
eInt[2] = 0.0f;
}
// Apply feedback terms
gx = gx + Kp * ex + Ki * eInt[0];
gy = gy + Kp * ey + Ki * eInt[1];
gz = gz + Kp * ez + Ki * eInt[2];
// Integrate rate of change of quaternion
pa = q2;
pb = q3;
pc = q4;
q1 = q1 + (-q2 * gx - q3 * gy - q4 * gz) * (0.5f * deltat);
q2 = pa + (q1 * gx + pb * gz - pc * gy) * (0.5f * deltat);
q3 = pb + (q1 * gy - pa * gz + pc * gx) * (0.5f * deltat);
q4 = pc + (q1 * gz + pa * gy - pb * gx) * (0.5f * deltat);
// Normalise quaternion
norm = sqrt(q1 * q1 + q2 * q2 + q3 * q3 + q4 * q4);
norm = 1.0f / norm;
q[0] = q1 * norm;
q[1] = q2 * norm;
q[2] = q3 * norm;
q[3] = q4 * norm;
}参数说明与调优指南:
| 参数 | 默认值 | 作用 | 调大效果 | 调小效果 |
|---|---|---|---|---|
| Kp (比例增益) | 3.0f | 加速度/磁场纠正力度 | 响应快,收敛快,但抖动大 | 响应慢,收敛慢,但更平滑 |
| Ki (积分增益) | 0.1f | 消除长期陀螺仪零偏 | 静态误差消除快,可能积分饱和 | 静态误差消除慢,更稳定 |
3.3 滤波器收敛检测
cpp
// CONVERGE_FRAMES:收敛判定所需的连续静止帧数
// CONVERGE_THRESHOLD:加速度模长与 1g 的允许偏差
#define CONVERGE_FRAMES 80
#define CONVERGE_THRESHOLD 0.05f
// ── 滤波器收敛检测 ────────────────────────────────────────────
// 每帧在 loop() 中调用,传入当前加速度模长(单位 g)
// 连续 CONVERGE_FRAMES 帧模长偏差 < CONVERGE_THRESHOLD 即标记收敛
// 一旦收敛后不再重置(除非手动调用 resetConvergence())
void ICM20948::updateConvergence(float accelMag)
{
if (_converged) return; // 已收敛,直接返回,不消耗 CPU
if (fabs(accelMag - 1.0f) < CONVERGE_THRESHOLD)
{
_convergeCount++;
if (_convergeCount >= CONVERGE_FRAMES)
{
_converged = true;
}
}
else
{
// 检测到加速度异常(运动或冲击),重置计数
_convergeCount = 0;
}
}主程序中的调用方式
cpp
// 在loop()中,计算加速度模长并调用库函数
float accelMag = sqrt(myIMU.ax*myIMU.ax + myIMU.ay*myIMU.ay + myIMU.az*myIMU.az);
myIMU.updateConvergence(accelMag);
// 如果未收敛,只输出VOFA+数据,跳过PLX-DAQ
if (!myIMU.isFilterConverged()) {
Serial.print(myIMU.yaw, 2); Serial.print(',');
Serial.print(myIMU.pitch, 2); Serial.print(',');
Serial.println(myIMU.roll, 2);
return; // 跳过PLX-DAQ数据帧
}
// 收敛后,正常输出VOFA+和PLX-DAQ双协议帧3.4 双协议并行输出
利用两套上位机的容错机制,实现了单串口双协议输出
cpp
if (myIMU.delt_t > 60)
{
// ── 四元数转欧拉角 ──────────────────────────────────
myIMU.yaw = atan2(
2.0f * (*(getQ()+1) * *(getQ()+2) + *getQ() * *(getQ()+3)),
*getQ() * *getQ() + *(getQ()+1) * *(getQ()+1)
- *(getQ()+2) * *(getQ()+2) - *(getQ()+3) * *(getQ()+3)
);
myIMU.pitch = -asin(
2.0f * (*(getQ()+1) * *(getQ()+3) - *getQ() * *(getQ()+2))
);
myIMU.roll = atan2(
2.0f * (*getQ() * *(getQ()+1) + *(getQ()+2) * *(getQ()+3)),
*getQ() * *getQ() - *(getQ()+1) * *(getQ()+1)
- *(getQ()+2) * *(getQ()+2) + *(getQ()+3) * *(getQ()+3)
);
myIMU.pitch *= RAD_TO_DEG;
myIMU.yaw *= RAD_TO_DEG;
myIMU.roll *= RAD_TO_DEG;
// 修正磁偏角(深圳约 -2.5°,查询: ngdc.noaa.gov/geomag-web)
myIMU.yaw -= 2.5;
// ══════════════════════════════════════════════════════
// 滤波器收敛检测(基于库函数,不在 ino 中手动计数)
//
// updateConvergence() 每帧检测加速度模长是否稳定在 1g 附近,
// 连续 CONVERGE_FRAMES 帧满足条件后 isFilterConverged() 返回 true。
// 参数在 ICM20948.h 中配置:
// CONVERGE_FRAMES = 80 (约 5 秒)
// CONVERGE_THRESHOLD = 0.05f
// ══════════════════════════════════════════════════════
float accelMag = sqrt(myIMU.ax * myIMU.ax
+ myIMU.ay * myIMU.ay
+ myIMU.az * myIMU.az);
myIMU.updateConvergence(accelMag);
if (!myIMU.isFilterConverged())
{
// ── 收敛期:VOFA+ 发送真实数据,但幅度受限于收敛过程 ──
// 直接输出当前解算结果,VOFA+ 会看到姿态角从初始漂移
// 逐渐稳定的过程(比强制零值更真实,也不会卡在 0,0,0)
// PLX-DAQ 在此期间不写入 Excel,等待收敛后才正式记录
Serial.print(myIMU.yaw, 2); Serial.print(",");
Serial.print(myIMU.pitch, 2); Serial.print(",");
Serial.print(myIMU.roll, 2); Serial.println(" ");
myIMU.count = millis();
myIMU.sumCount = 0;
myIMU.sum = 0;
return; // 跳过 PLX-DAQ 数据帧,等收敛后再记录
}
// ══════════════════════════════════════════════════════
// ① VOFA+ Firewater 格式(与原代码完全一致)
// 格式: yaw,pitch,roll \n
// PLX-DAQ 无法识别此行,自动忽略
// ══════════════════════════════════════════════════════
Serial.print(myIMU.yaw, 2); Serial.print(",");
Serial.print(myIMU.pitch, 2); Serial.print(",");
Serial.print(myIMU.roll, 2); Serial.println(" ");
// ══════════════════════════════════════════════════════
// ② PLX-DAQ v2 DATA 帧(紧跟 VOFA+ 帧之后)
// 格式: DATA,TIME,TIMER,val1,...,lastVal\n
// VOFA+ 无法识别 DATA 开头的行,自动忽略
// TIME :替换为 PC 系统时间
// TIMER :替换为本次连接运行秒数
// 最后一字段用 println,换行符触发 PLX-DAQ 写入一行
// ══════════════════════════════════════════════════════
Serial.print("DATA,TIME,TIMER,");
// 姿态角(°,2 位小数)
Serial.print(myIMU.yaw, 2); Serial.print(",");
Serial.print(myIMU.pitch, 2); Serial.print(",");
Serial.print(myIMU.roll, 2); Serial.print(",");
// 加速度(g,4 位小数)
Serial.print(myIMU.ax, 4); Serial.print(",");
Serial.print(myIMU.ay, 4); Serial.print(",");
Serial.print(myIMU.az, 4); Serial.print(",");
// 陀螺仪(°/s,3 位小数)
Serial.print(myIMU.gx, 3); Serial.print(",");
Serial.print(myIMU.gy, 3); Serial.print(",");
Serial.print(myIMU.gz, 3); Serial.print(",");
// 磁力计(mG,2 位小数)最后一字段用 println
Serial.print(myIMU.mx, 2); Serial.print(",");
Serial.print(myIMU.my, 2); Serial.print(",");
Serial.println(myIMU.mz, 2);
myIMU.count = millis();
myIMU.sumCount = 0;
myIMU.sum = 0;
digitalWrite(myLed, !digitalRead(myLed));
}3.5 项目完整代码
cpp
/**************************************************************************************
* 文件: /ICM20948_PLXDAQ_VOFA/ICM20948_PLXDAQ_VOFA.ino
* 作者:零知实验室(深圳市在芯间科技有限公司)
* -^^- 零知实验室,让电子制作变得更简单! -^^-
* 时间: 2026-3-24
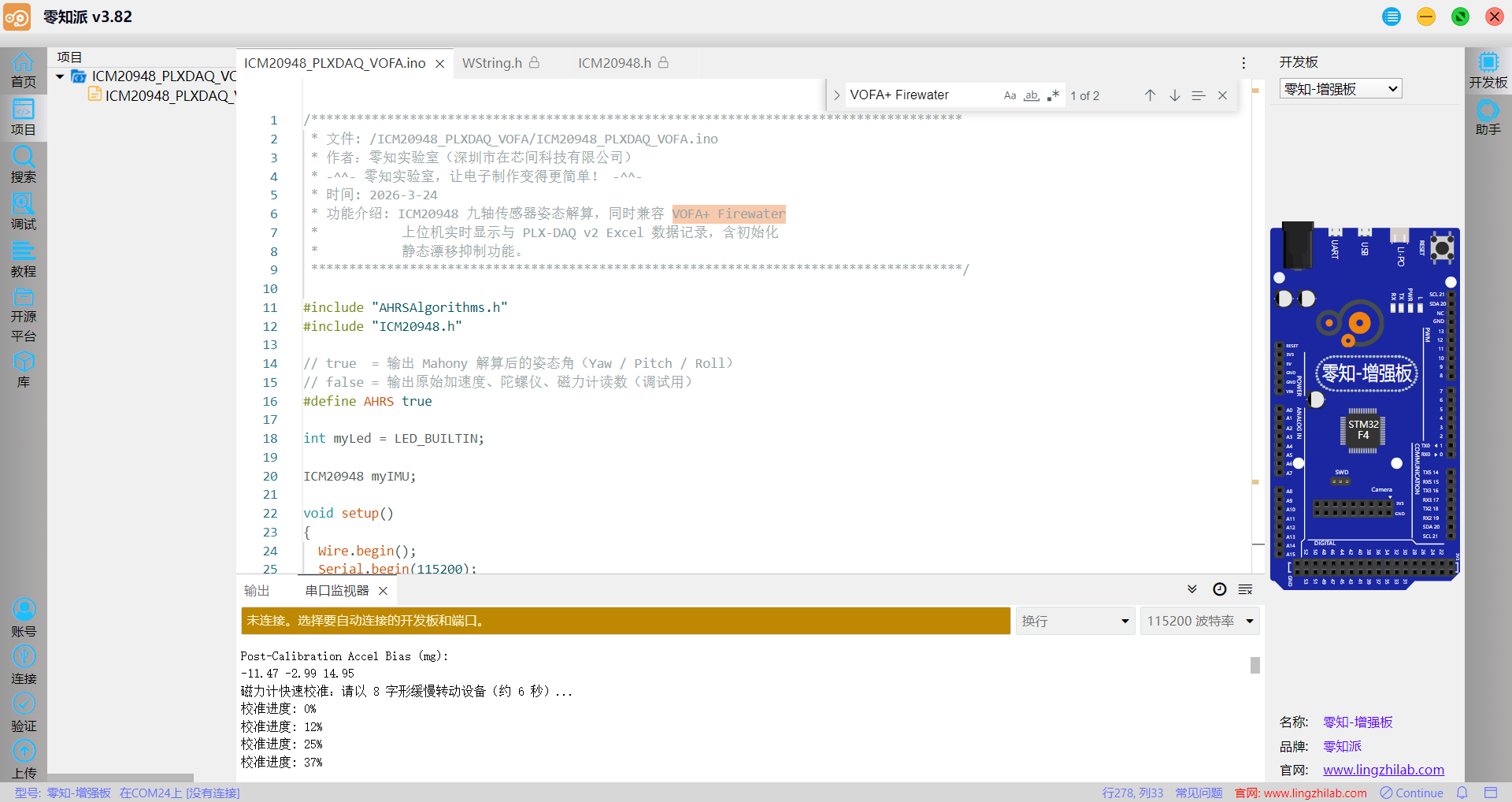
* 功能介绍: ICM20948 九轴传感器姿态解算,同时兼容 VOFA+ Firewater
* 上位机实时显示与 PLX-DAQ v2 Excel 数据记录,含初始化
* 静态漂移抑制功能。
**************************************************************************************/
#include "AHRSAlgorithms.h"
#include "ICM20948.h"
// true = 输出 Mahony 解算后的姿态角(Yaw / Pitch / Roll)
// false = 输出原始加速度、陀螺仪、磁力计读数(调试用)
#define AHRS true
int myLed = LED_BUILTIN;
ICM20948 myIMU;
void setup()
{
Wire.begin();
Serial.begin(115200);
pinMode(myLed, OUTPUT);
digitalWrite(myLed, HIGH);
if (myIMU.isInI2cMode())
Serial.println("传感器使用 I2C 接口");
else
Serial.println("传感器使用 SPI 接口");
// ── 复位 ICM20948 ──────────────────────────────────────────
myIMU.writeByte(ICM20948_ADDRESS, PWR_MGMT_1, READ_FLAG);
delay(100);
myIMU.writeByte(ICM20948_ADDRESS, PWR_MGMT_1, 0x01);
delay(100);
// ── 读取 WHO_AM_I,验证通信是否正常 ──────────────────────
byte c = myIMU.readByte(ICM20948_ADDRESS, WHO_AM_I_ICM20948);
Serial.print(F("ICM20948 设备ID: 0x")); Serial.println(c, HEX);
Serial.print(F("期望值: 0x")); Serial.println(0xEA, HEX);
if (c == 0xEA)
{
Serial.println(F("ICM20948 在线,开始初始化..."));
// ── 自检 ──────────────────────────────────────────────────
myIMU.ICM20948SelfTest(myIMU.selfTest);
Serial.print(F("加速度 X 轴自检偏差: ")); Serial.print(myIMU.selfTest[0], 1); Serial.println("%");
Serial.print(F("加速度 Y 轴自检偏差: ")); Serial.print(myIMU.selfTest[1], 1); Serial.println("%");
Serial.print(F("加速度 Z 轴自检偏差: ")); Serial.print(myIMU.selfTest[2], 1); Serial.println("%");
Serial.print(F("陀螺仪 X 轴自检偏差: ")); Serial.print(myIMU.selfTest[3], 1); Serial.println("%");
Serial.print(F("陀螺仪 Y 轴自检偏差: ")); Serial.print(myIMU.selfTest[4], 1); Serial.println("%");
Serial.print(F("陀螺仪 Z 轴自检偏差: ")); Serial.print(myIMU.selfTest[5], 1); Serial.println("%");
// ── 陀螺仪和加速度计校准,偏置写入硬件寄存器 ──────────
myIMU.calibrateICM20948(myIMU.gyroBias, myIMU.accelBias);
myIMU.initICM20948();
Serial.println("ICM20948 初始化完成");
// ── 验证磁力计通信 ─────────────────────────────────────
byte d = myIMU.readByte(AK09916_ADDRESS, WHO_AM_I_AK09916);
Serial.print("AK09916 设备ID: 0x"); Serial.println(d, HEX);
Serial.print("期望值: 0x"); Serial.println(0x09, HEX);
if (d != 0x09)
{
Serial.println(F("磁力计通信失败,程序终止!"));
Serial.flush();
abort();
}
// ── 磁力计初始化(库已修正为 100Hz 连续模式)──────────
myIMU.initAK09916();
Serial.println("AK09916 初始化完成");
// ── 获取各传感器量程分辨率(只需执行一次)─────────────
myIMU.getAres();
myIMU.getGres();
myIMU.getMres();
// ── 磁力计偏置与比例校准 ───────────────────────────────
// MAG_CAL_FAST=true 约 6 秒(在 ICM20948.h 中配置)
// MAG_CAL_FAST=false 约 22 秒
// 校准期间库函数每 50 帧打印一次进度,VOFA+ / PLX-DAQ 连接不会超时
myIMU.magCalICM20948(myIMU.magBias, myIMU.magScale);
Serial.println("磁偏置校准值 (mG):");
Serial.println(myIMU.magBias[0]);
Serial.println(myIMU.magBias[1]);
Serial.println(myIMU.magBias[2]);
delay(500);
// ══════════════════════════════════════════════════════════
// PLX-DAQ 初始化指令
// CLEARDATA :清空工作表原有数据
// LABEL :设置列标题(粗体)
// RESETTIMER :内部计时器归零
// ══════════════════════════════════════════════════════════
Serial.println("CLEARDATA");
Serial.println("LABEL,PC time, running time(s),Yaw(deg),Pitch(deg),Roll(deg),"
"Ax(g),Ay(g),Az(g),Gx(dps),Gy(dps),Gz(dps),Mx(mG),My(mG),Mz(mG)");
Serial.println("RESETTIMER");
}
else
{
Serial.print("无法连接到 ICM20948,设备ID: 0x");
Serial.println(c, HEX);
Serial.println(F("通信失败,程序终止!"));
Serial.flush();
abort();
}
}
void loop()
{
// ── 检查数据就绪中断标志位 ────────────────────────────────
if (myIMU.readByte(ICM20948_ADDRESS, INT_STATUS_1) & 0x01)
{
// 读取加速度计,转换为 g
myIMU.readAccelData(myIMU.accelCount);
myIMU.ax = (float)myIMU.accelCount[0] * myIMU.aRes;
myIMU.ay = (float)myIMU.accelCount[1] * myIMU.aRes;
myIMU.az = (float)myIMU.accelCount[2] * myIMU.aRes;
// 读取陀螺仪,转换为 °/s
myIMU.readGyroData(myIMU.gyroCount);
myIMU.gx = (float)myIMU.gyroCount[0] * myIMU.gRes;
myIMU.gy = (float)myIMU.gyroCount[1] * myIMU.gRes;
myIMU.gz = (float)myIMU.gyroCount[2] * myIMU.gRes;
// 读取磁力计,转换为 mG 并减去偏置
myIMU.readMagData(myIMU.magCount);
myIMU.mx = (float)myIMU.magCount[0] * myIMU.mRes - myIMU.magBias[0];
myIMU.my = (float)myIMU.magCount[1] * myIMU.mRes - myIMU.magBias[1];
myIMU.mz = (float)myIMU.magCount[2] * myIMU.mRes - myIMU.magBias[2];
}
// 更新积分时间间隔(必须在四元数更新前调用)
myIMU.updateTime();
// ── Mahony 姿态解算 ───────────────────────────────────────
// 注意:ICM20948 加速度计与磁力计轴向存在对准偏差,
// 按数据手册约定交换 mx/my 轴,使传感器 X 轴朝向正前方
MahonyQuaternionUpdate(
myIMU.ax, myIMU.ay, myIMU.az,
myIMU.gx * DEG_TO_RAD, myIMU.gy * DEG_TO_RAD, myIMU.gz * DEG_TO_RAD,
myIMU.my, myIMU.mx, myIMU.mz,
myIMU.deltat
);
// ── 原始数据调试模式(AHRS = false,500ms 一次)──────────
if (!AHRS)
{
myIMU.delt_t = millis() - myIMU.count;
if (myIMU.delt_t > 500)
{
Serial.print("加速度 X: "); Serial.print(1000 * myIMU.ax); Serial.print(" mg ");
Serial.print("Y: "); Serial.print(1000 * myIMU.ay); Serial.print(" mg ");
Serial.print("Z: "); Serial.print(1000 * myIMU.az); Serial.println(" mg");
Serial.print("陀螺仪 X: "); Serial.print(myIMU.gx, 3); Serial.print(" °/s ");
Serial.print("Y: "); Serial.print(myIMU.gy, 3); Serial.print(" °/s ");
Serial.print("Z: "); Serial.print(myIMU.gz, 3); Serial.println(" °/s");
Serial.print("磁力计 X: "); Serial.print(myIMU.mx); Serial.print(" mG ");
Serial.print("Y: "); Serial.print(myIMU.my); Serial.print(" mG ");
Serial.print("Z: "); Serial.print(myIMU.mz); Serial.println(" mG");
myIMU.tempCount = myIMU.readTempData();
myIMU.temperature = ((float)myIMU.tempCount) / 333.87 + 21.0;
Serial.print("温度: "); Serial.print(myIMU.temperature, 1); Serial.println(" °C");
myIMU.count = millis();
digitalWrite(myLed, !digitalRead(myLed));
}
}
// ── AHRS 姿态角输出模式(AHRS = true,60ms 一次)─────────
else
{
myIMU.delt_t = millis() - myIMU.count;
if (myIMU.delt_t > 60)
{
// ── 四元数转欧拉角 ──────────────────────────────────
myIMU.yaw = atan2(
2.0f * (*(getQ()+1) * *(getQ()+2) + *getQ() * *(getQ()+3)),
*getQ() * *getQ() + *(getQ()+1) * *(getQ()+1)
- *(getQ()+2) * *(getQ()+2) - *(getQ()+3) * *(getQ()+3)
);
myIMU.pitch = -asin(
2.0f * (*(getQ()+1) * *(getQ()+3) - *getQ() * *(getQ()+2))
);
myIMU.roll = atan2(
2.0f * (*getQ() * *(getQ()+1) + *(getQ()+2) * *(getQ()+3)),
*getQ() * *getQ() - *(getQ()+1) * *(getQ()+1)
- *(getQ()+2) * *(getQ()+2) + *(getQ()+3) * *(getQ()+3)
);
myIMU.pitch *= RAD_TO_DEG;
myIMU.yaw *= RAD_TO_DEG;
myIMU.roll *= RAD_TO_DEG;
// 修正磁偏角(深圳约 -2.5°,查询: ngdc.noaa.gov/geomag-web)
myIMU.yaw -= 2.5;
// ══════════════════════════════════════════════════════
// 滤波器收敛检测(基于库函数,不在 ino 中手动计数)
//
// updateConvergence() 每帧检测加速度模长是否稳定在 1g 附近,
// 连续 CONVERGE_FRAMES 帧满足条件后 isFilterConverged() 返回 true。
// 参数在 ICM20948.h 中配置:
// CONVERGE_FRAMES = 80 (约 5 秒)
// CONVERGE_THRESHOLD = 0.05f
// ══════════════════════════════════════════════════════
float accelMag = sqrt(myIMU.ax * myIMU.ax
+ myIMU.ay * myIMU.ay
+ myIMU.az * myIMU.az);
myIMU.updateConvergence(accelMag);
if (!myIMU.isFilterConverged())
{
// ── 收敛期:VOFA+ 发送真实数据,但幅度受限于收敛过程 ──
// 直接输出当前解算结果,VOFA+ 会看到姿态角从初始漂移
// 逐渐稳定的过程(比强制零值更真实,也不会卡在 0,0,0)
// PLX-DAQ 在此期间不写入 Excel,等待收敛后才正式记录
Serial.print(myIMU.yaw, 2); Serial.print(",");
Serial.print(myIMU.pitch, 2); Serial.print(",");
Serial.print(myIMU.roll, 2); Serial.println(" ");
myIMU.count = millis();
myIMU.sumCount = 0;
myIMU.sum = 0;
return; // 跳过 PLX-DAQ 数据帧,等收敛后再记录
}
// ══════════════════════════════════════════════════════
// ① VOFA+ Firewater 格式(与原代码完全一致)
// 格式: yaw,pitch,roll \n
// PLX-DAQ 无法识别此行,自动忽略
// ══════════════════════════════════════════════════════
Serial.print(myIMU.yaw, 2); Serial.print(",");
Serial.print(myIMU.pitch, 2); Serial.print(",");
Serial.print(myIMU.roll, 2); Serial.println(" ");
// ══════════════════════════════════════════════════════
// ② PLX-DAQ v2 DATA 帧(紧跟 VOFA+ 帧之后)
// 格式: DATA,TIME,TIMER,val1,...,lastVal\n
// VOFA+ 无法识别 DATA 开头的行,自动忽略
// TIME :替换为 PC 系统时间
// TIMER :替换为本次连接运行秒数
// 最后一字段用 println,换行符触发 PLX-DAQ 写入一行
// ══════════════════════════════════════════════════════
Serial.print("DATA,TIME,TIMER,");
// 姿态角(°,2 位小数)
Serial.print(myIMU.yaw, 2); Serial.print(",");
Serial.print(myIMU.pitch, 2); Serial.print(",");
Serial.print(myIMU.roll, 2); Serial.print(",");
// 加速度(g,4 位小数)
Serial.print(myIMU.ax, 4); Serial.print(",");
Serial.print(myIMU.ay, 4); Serial.print(",");
Serial.print(myIMU.az, 4); Serial.print(",");
// 陀螺仪(°/s,3 位小数)
Serial.print(myIMU.gx, 3); Serial.print(",");
Serial.print(myIMU.gy, 3); Serial.print(",");
Serial.print(myIMU.gz, 3); Serial.print(",");
// 磁力计(mG,2 位小数)最后一字段用 println
Serial.print(myIMU.mx, 2); Serial.print(",");
Serial.print(myIMU.my, 2); Serial.print(",");
Serial.println(myIMU.mz, 2);
myIMU.count = millis();
myIMU.sumCount = 0;
myIMU.sum = 0;
digitalWrite(myLed, !digitalRead(myLed));
}
}
}
/******************************************************************************
* 深圳市在芯间科技有限公司
* 淘宝店铺:在芯间科技零知板
* 店铺网址:https://shop533070398.taobao.com
* 版权说明:
* 1.本代码的版权归【深圳市在芯间科技有限公司】所有,仅限个人非商业性学习使用。
* 2.严禁将本代码或其衍生版本用于任何商业用途(包括但不限于产品开发、付费服务、企业内部使用等)。
* 3.任何商业用途均需事先获得【深圳市在芯间科技有限公司】的书面授权,未经授权的商业使用行为将被视为侵权。
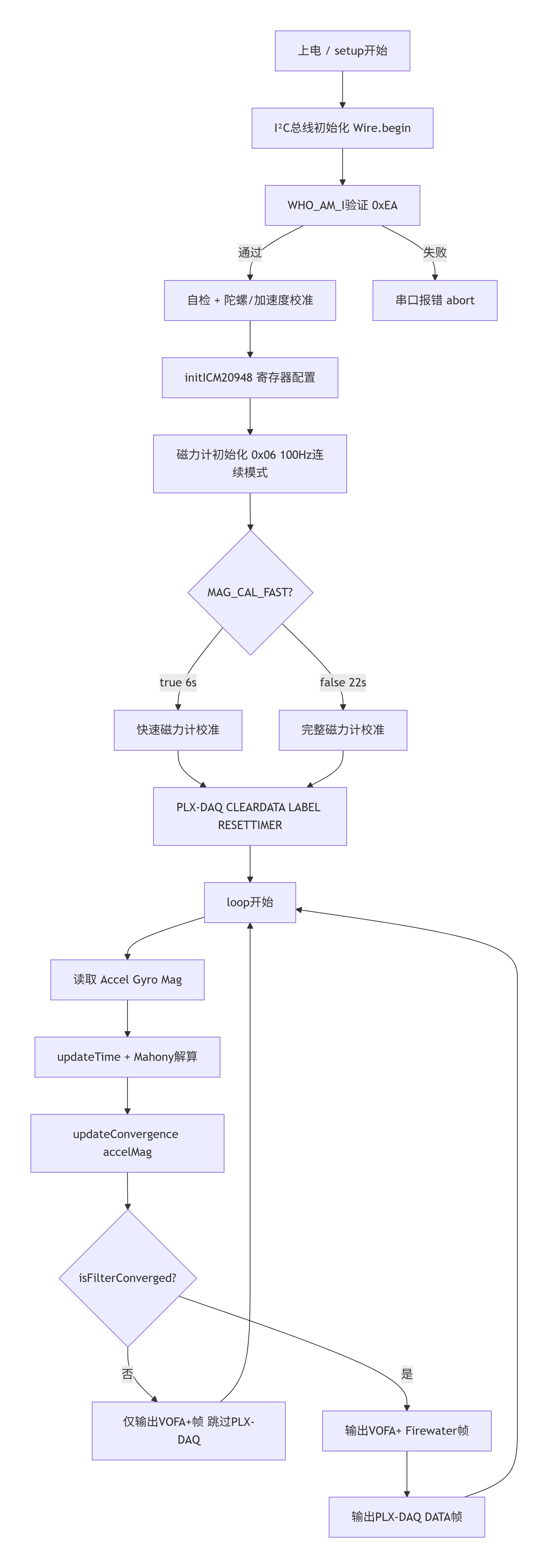
******************************************************************************/系统流程图
四、项目结果演示
4.1 操作流程
编译上传:在零知IDE中选择「零知增强板」,编译并上传代码。等待初始化完成,串口输出"磁力计校准完成!"
磁力计校准
收到"磁力计快速校准:请以8字形缓慢转动设备"提示后,将设备以8字形转动约6秒,让磁力计采集各方向数据
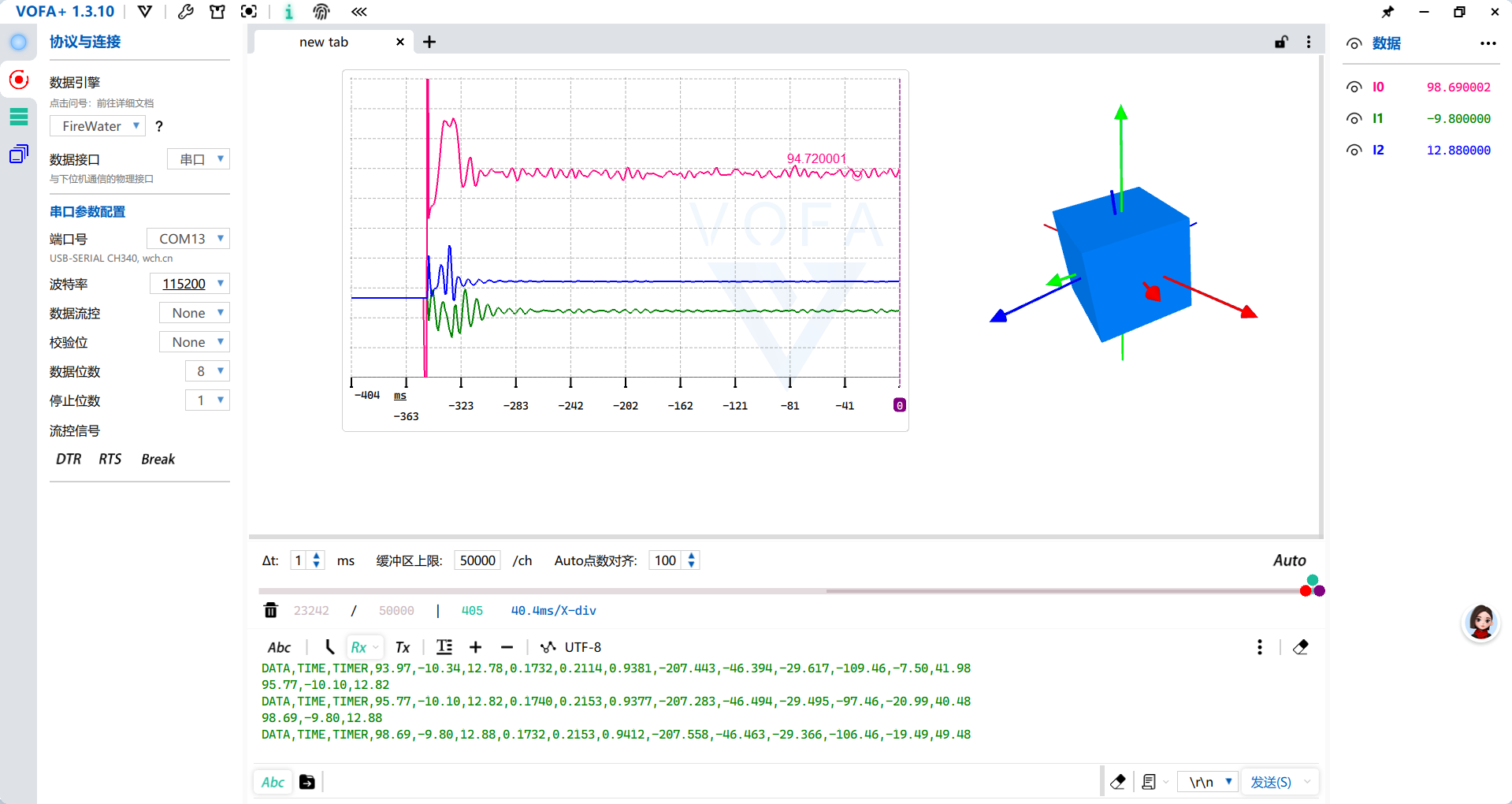
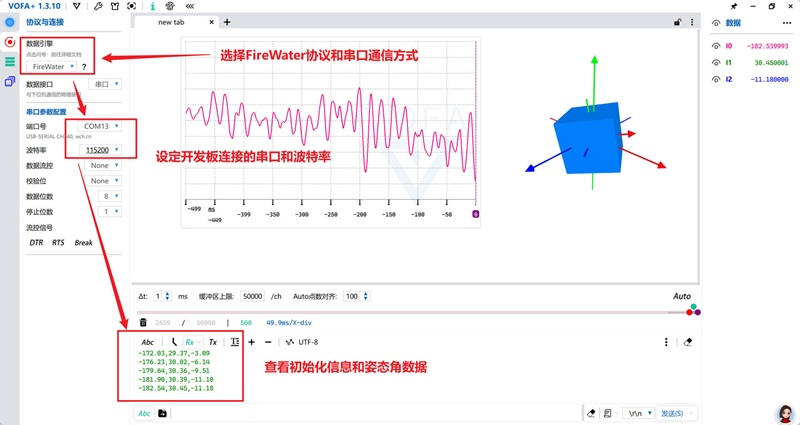
V OFA+实时显示
打开VOFA+,选择正确COM口,波特率115200,协议选Firewater。点击连接,即可看到Yaw/Pitch/Roll三通道实时波形
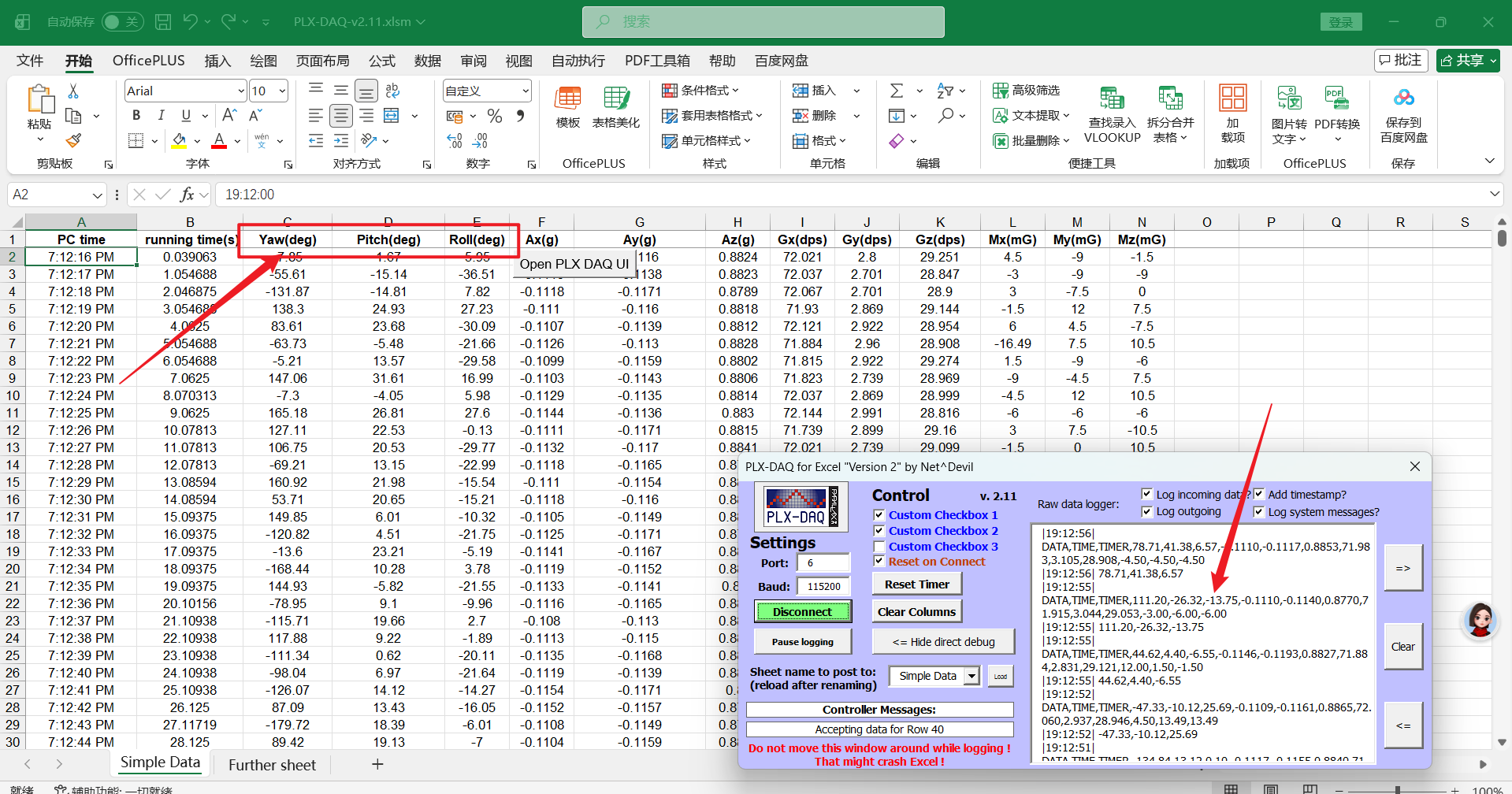
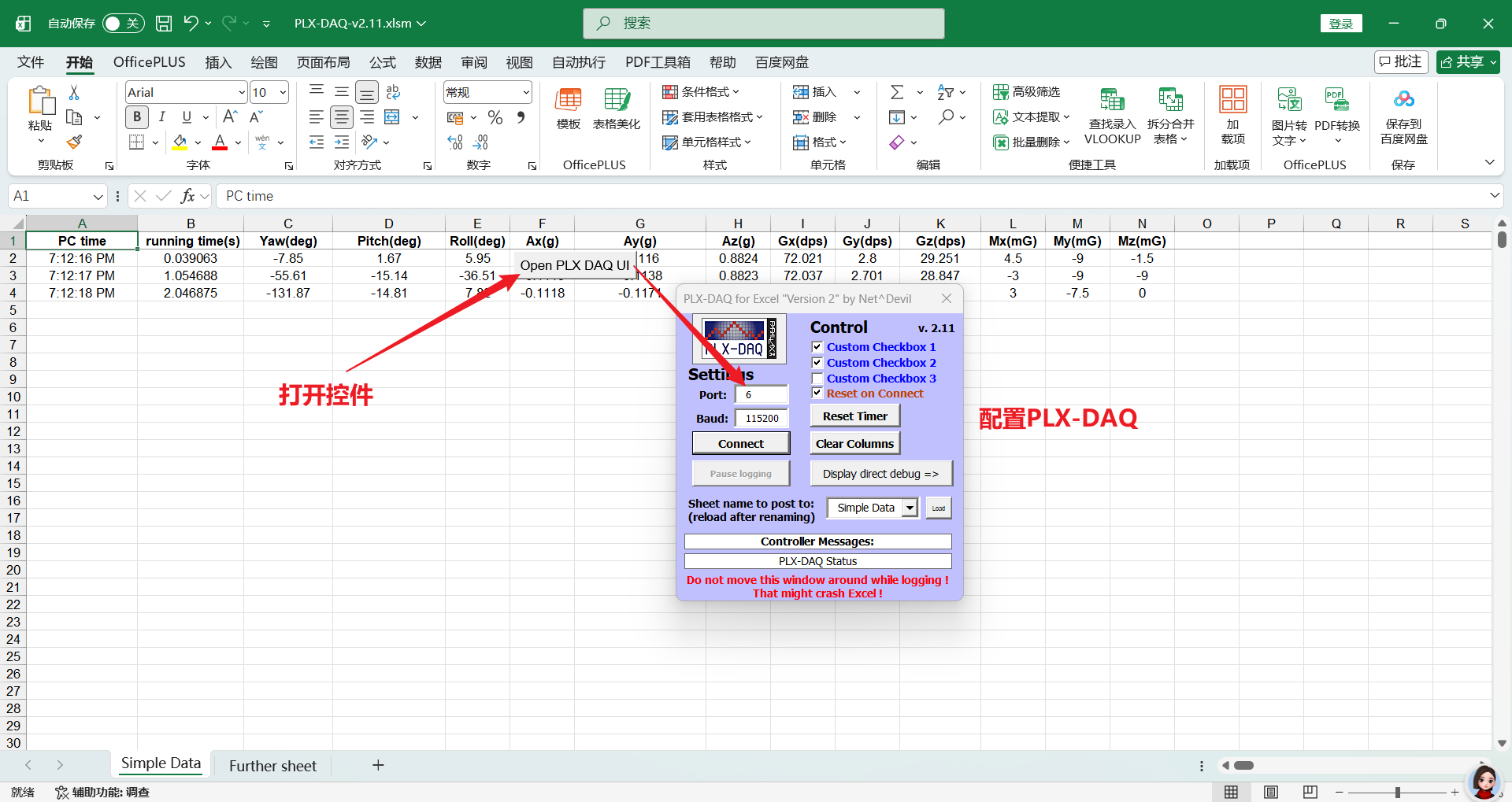
PLX-DAQ Excel记录
关闭串口监视器,打开PLX-DAQ v2.11.xlsm,填写COM口和波特率115200,点击Connect。Excel会自动填充数据(注意:数据会在滤波器收敛后才开始写入)
数据导出:采集完成后点击Disconnect,在Excel中另存为.xlsx文件即完成导出。
4.2 上位机搭建
(1)VOFA+ 配置
新建数据源 → 串口 → 选择对应COM口 → 波特率115200 → 协议选择FireWater
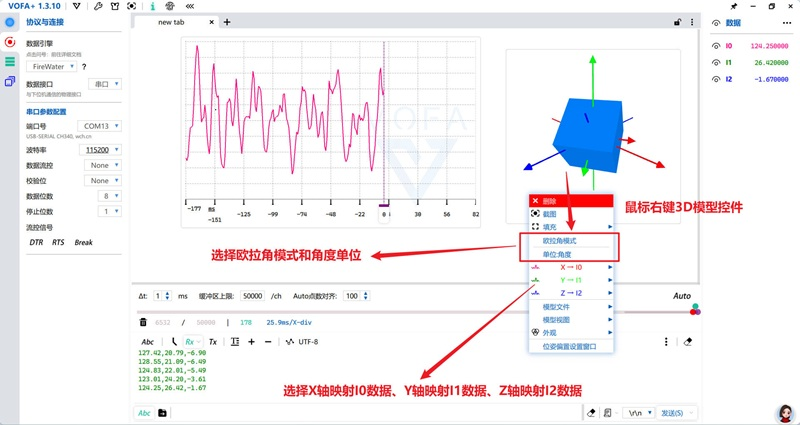
添加3D立方体控件
绑定四元数数据通道 → 设置模型缩放比例
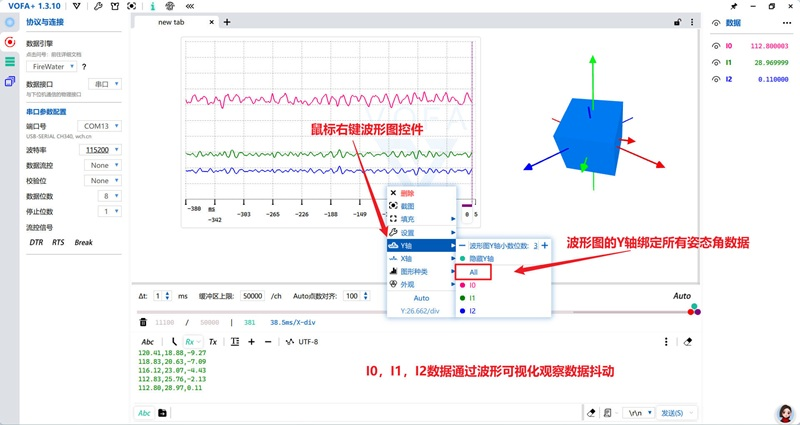
添加波形通道
添加三个通道 → 对应Yaw / Pitch / Roll,可设置颜色
(2)PLX-DAQ v2配置
下载PLX-DAQ-v2.11.xlsm,双击打开并点击「启用内容」、Port填写COM编号,Baud填写115200、关闭零知IDE串口监视器后再点击Connect
4.3 视频演示
姿态角解算 + PLX-DAQ Excel数据导出 演示
完整演示基于零知增强板驱动ICM20948九轴传感器的项目全流程, VOFA+ Firewater协议实时三通道姿态角波形展示。PLX-DAQ v2 Excel自动记录演示(含收敛后才写入的效果对比)。数据导出为.xlsx文件并在Excel中绘制姿态角时序图
五、ICM20948技术知识讲解
ICM-20948 支持用于连接外部传感器的辅助 I²C 接口、片上 16 位模数转换器(ADC)、可编程数字滤波器、内置温度传感器以及可编程中断
5.1 ICM20948内部架构
加速度计和陀螺仪共用STM32的主I²C总线(地址0x69)
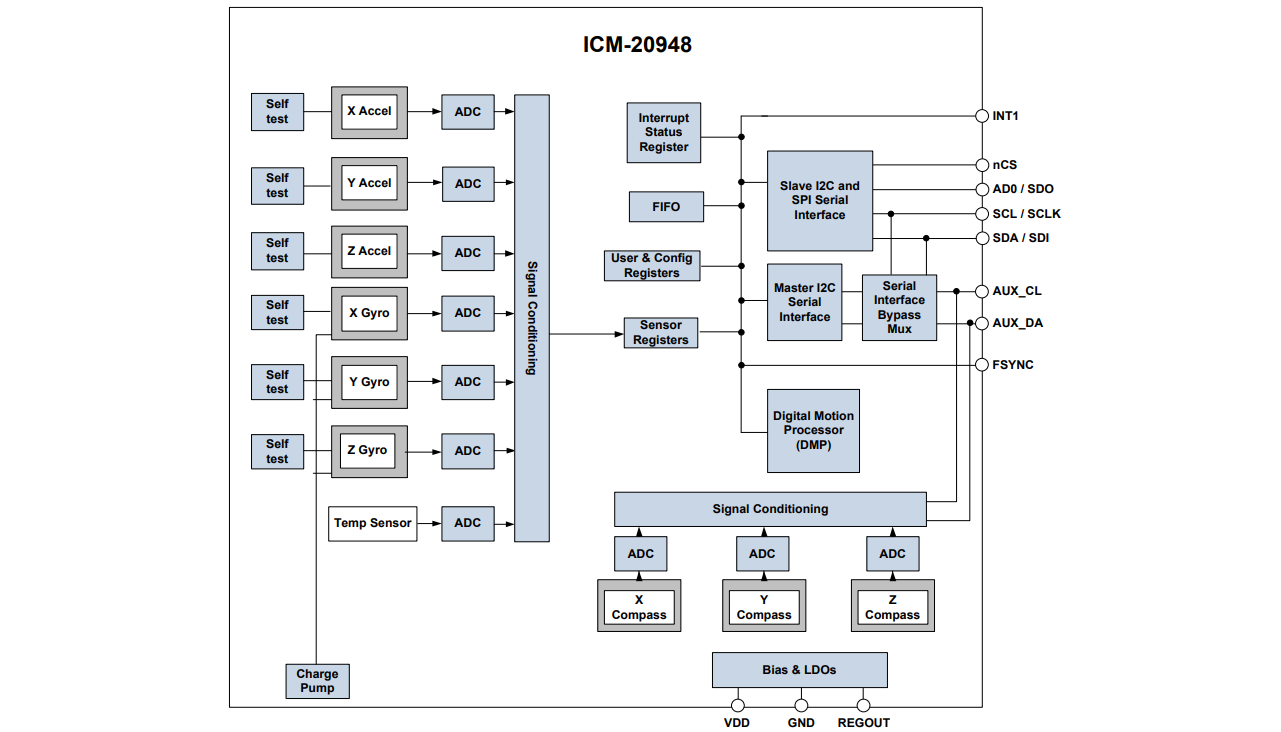
磁力计AK09916通过ICM20948内部的I²C Master桥接,或通过配置I²C Bypass模式直接访问(地址0x0C)。使用Bypass模式,使主控可以直接操作磁力计
5.2 I2C通信与寄存器Bank机制
I2C通信时序
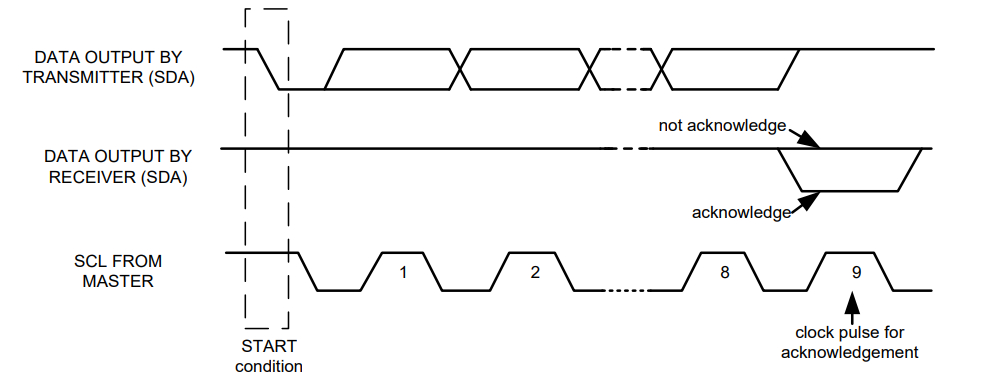
STM32发出起始信号,发送设备地址0x69 + W,然后发送寄存器地址0x7F,再发送0x20(切换到Bank2),停止位结束。下一帧起始信号后访问Bank2中的GYRO_CONFIG_1(0x01)并写入配置值
Bank切换时序
User Bank机制里面全部寄存器分为4个Bank,通过REG_BANK_SEL(0x7F)切换
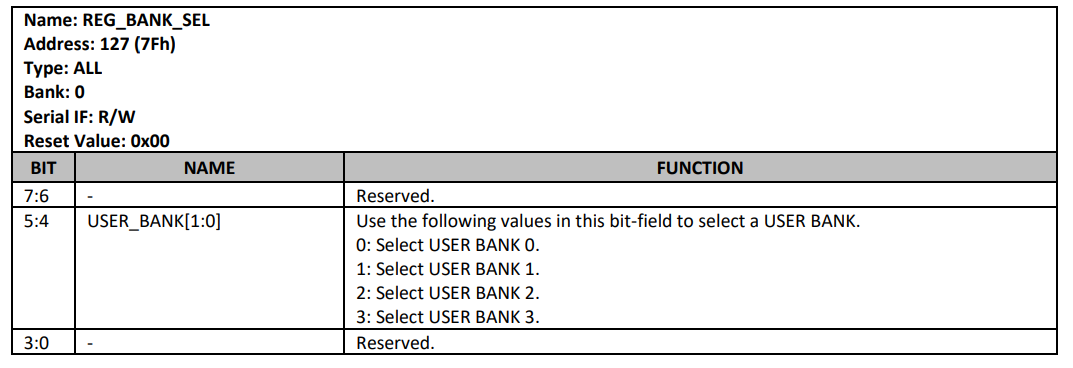
| Bank | 地址范围 | 主要内容 |
|---|---|---|
| Bank 0 (0x00) | 0x00 ~ 0x7E | 传感器数据输出、中断状态、电源管理 |
| Bank 1 (0x10) | 0x00 ~ 0x53 | 自检寄存器、加速度计偏置 |
| Bank 2 (0x20) | 0x00 ~ 0x54 | 陀螺仪/加速度计配置、采样率分频、DLPF设置 |
| Bank 3 (0x30) | 0x00 ~ 0x17 | I²C Master配置,AK09916桥接相关 |
六、常见问题解答(FAQ)
Q1:Yaw角上电后就开始漂移,永远不收敛
A:最可能的原因是磁力计未进行8字形校准 ,或校准时未充分转动设备。重新上电,在"磁力计快速校准"提示出现后认真做8字形运动约6秒。若仍然漂移,检查
initAK09916()是否写入了正确的0x06模式
Q2:Pitch接近±90°时Yaw突然跳变到任意值
A:这是欧拉角表示法的万向节锁(Gimbal Lock)问题 。当Pitch=±90°时,Yaw和Roll失去区分度,
atan2()输出不确定。解决方案:若应用需要大倾角场景,直接使用getQ()获取四元数进行计算,不要转换成欧拉角
项目资源整合
VOFA+ 上位机: VOFA+ 官网下载
ICM20948 数据手册: icm-20948-v1.5.pdf
PLX-DAQ v2.11.xlsm 宏数据采集插件: PLX-DAQ-v2.11.zip
✔访问零知实验室,获取更多实战项目和教程资源吧!