分布式EKF协同导航算法(含协方差交互融合)代码,附下载链接
文章目录
程序详解
算法总体框架
多节点集群的分布式EKF协同定额。系统融合三类信息源:
- 惯性测量单元( I M U IMU IMU):用于状态预测
- 全球导航卫星系统( G N S S GNSS GNSS):提供绝对位置观测
- 超宽带( U W B UWB UWB):提供节点间相对距离约束
同时,为解决分布式系统中估计误差相关性未知问题 ,引入协方差交集(Covariance Intersection, CI)融合方法,提升系统一致性与稳定性。
分布式EKF算法流程
每个时间步,每个节点独立执行以下步骤:
-
状态预测(IMU驱动)
-
GNSS更新
-
UWB相对观测更新
-
CI融合(关键步骤)
仿真设计
仿真设置如下:
- 节点数量:3
- 状态维度:6(位置 + 速度)
- 仿真步长:0.1 s
- 仿真时长:200步
- 噪声:
- GNSS:高斯噪声
- UWB:测距噪声
节点运动为匀速模型,用于验证算法性能。
如需其他参数,可在代码中修改:
运行结果
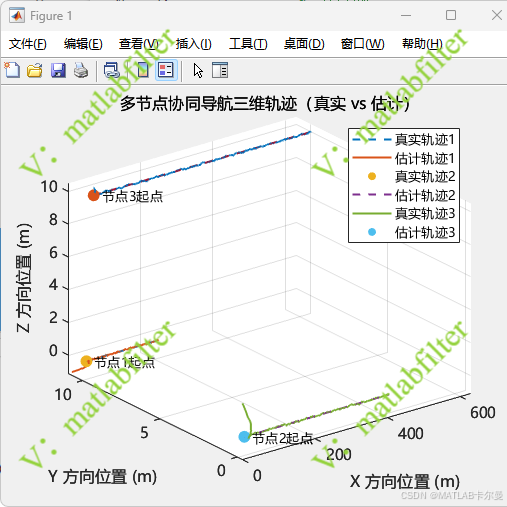
三维轨迹图:
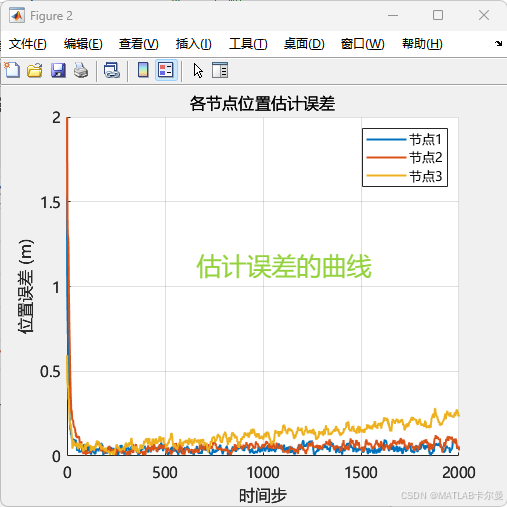
误差曲线:
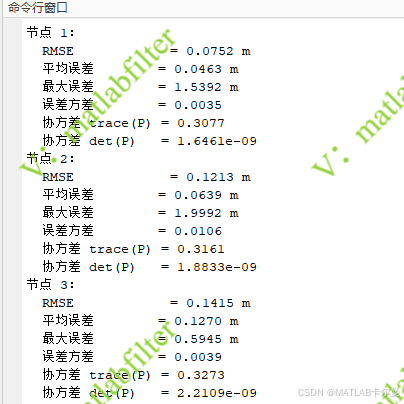
命令行窗口输出:
MATLAB源代码
部分代码如下:
matlab
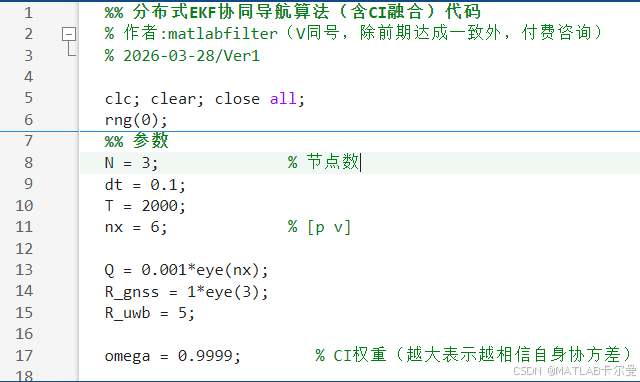
%% 分布式EKF协同导航算法(含CI融合)代码
% 作者:matlabfilter(V同号,除前期达成一致外,付费咨询)
% 2026-03-28/Ver1
clc; clear; close all;
rng(0);
%% 参数
N = 3; % 节点数
dt = 0.1;
T = 2000;
nx = 6; % [p v]
Q = 0.001*eye(nx);
R_gnss = 1*eye(3);
R_uwb = 5;
omega = 0.9999; % CI权重(越大表示越相信自身协方差)
%% 初始化
X = zeros(nx,N);
P = repmat(eye(nx),[1,1,N]);
X_true = zeros(nx,N);
traj_est = zeros(3,N,T);
traj_true = zeros(3,N,T);完整代码:
https://download.csdn.net/download/callmeup/92768053
或:如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者