文章:EW-DETR: Evolving World Object Detection via Incremental Low-Rank DEtection TRansformer
代码:暂无
单位:索尼印度研究院、印度国际信息技术研究所海德拉巴分校
一、问题背景
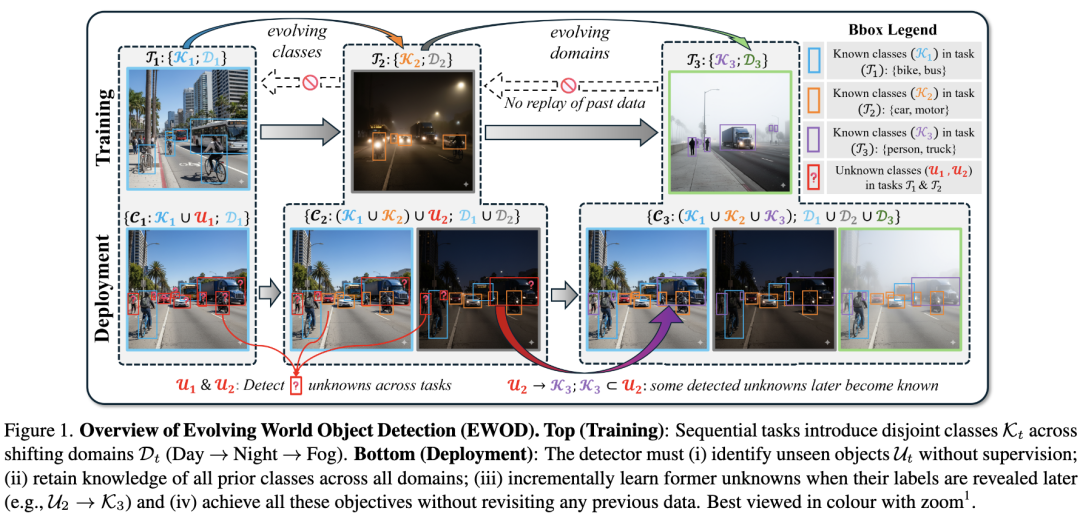
传统的目标检测模型都建立在"封闭世界"假设上,训练和测试的场景、物体类别基本固定,比如只在晴天白天识别固定的几类物体,模型就能表现良好。但真实世界的环境始终在动态演化,以自动驾驶、仓库机器人这类实际应用为例,模型会面临三大核心挑战:
-
类别持续新增:会遇到从未训练过的新物体,比如新型施工设备、新款式商品;
-
场景领域迁移:环境不断变化,从白天到黑夜、从晴天到大雾雨天,光照、背景等视觉特征差异巨大;
-
数据使用受限:出于隐私保护、存储限制等原因,无法保存和复用之前的训练数据,也不能通过回放旧样本弥补模型遗忘。
而现有的检测方法都存在明显短板:开放世界检测方法能识别未知物体、增量学习新类别,但依赖固定场景和旧数据回放;域增量检测方法能适配场景变化,却只能识别已知类别,会把未知物体误判为已知类或背景。为此,研究团队提出了EWOD(演化世界目标检测) 新范式,要求模型在无旧数据、无额外监督的前提下,同时实现增量学习新类别、适配跨域场景、精准识别未知物体三大目标,这也是更贴合真实世界的检测需求。
二、方法创新
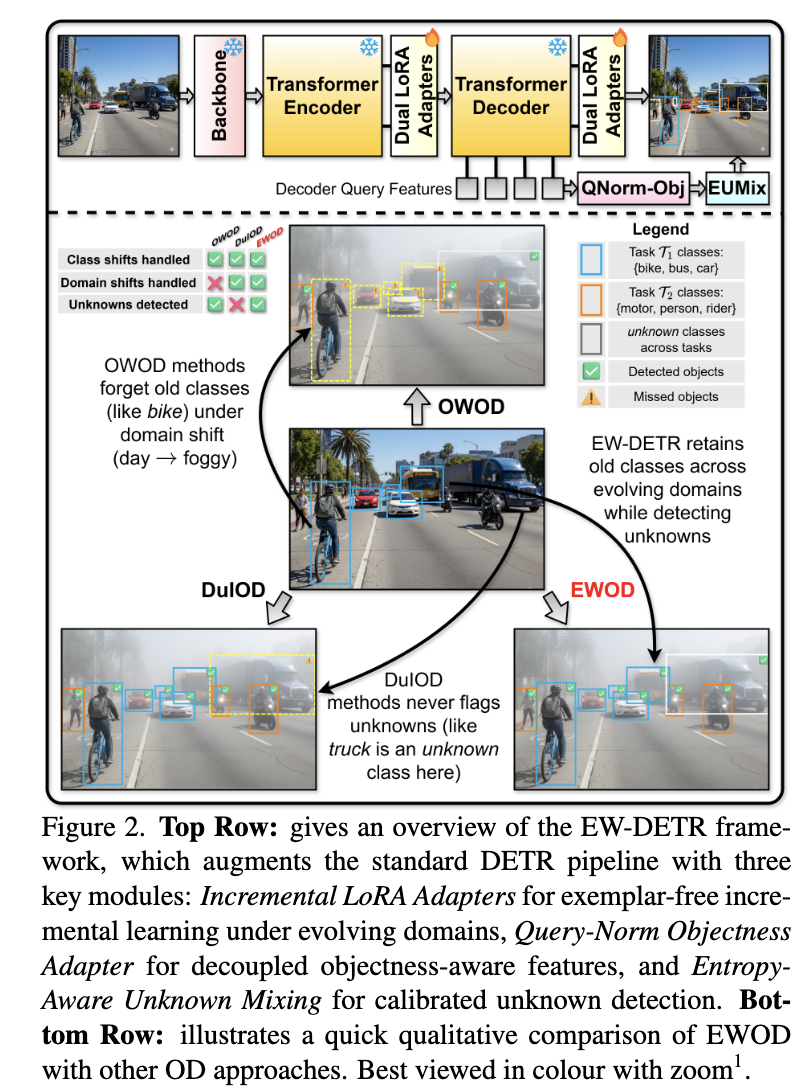
为了应对EWOD的全新挑战,团队提出了EW-DETR框架,它基于经典的DETR系列目标检测模型进行升级,新增了三个协同工作的核心模块,既保留原模型的检测能力,又完美适配演化世界的检测需求,且全程无需依赖任何旧数据样本:
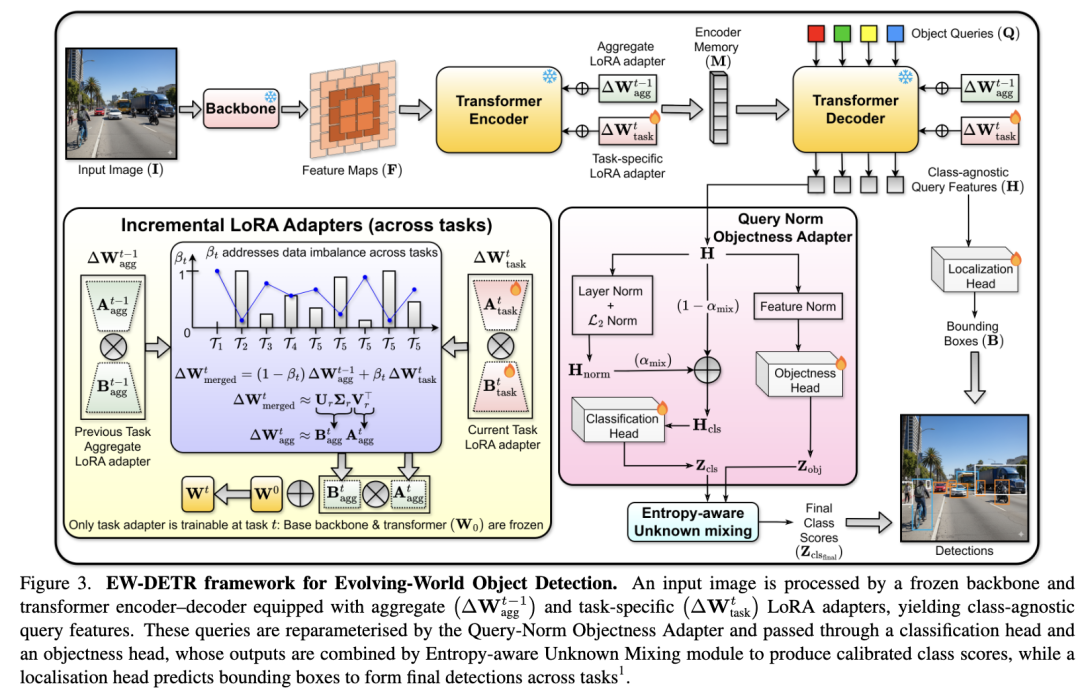
1. 增量LoRA适配器:解决"学新忘旧",实现无样本增量学习
设计双适配器架构,一个聚合适配器 压缩存储所有旧任务的知识,一个任务专属适配器 捕捉当前新任务的类别和场景变化;同时提出数据感知融合策略,根据当前任务与历史任务的样本量比例,动态调整两个适配器的融合权重,解决不同任务间的数据不平衡问题。融合后还通过截断SVD将更新投影回低秩空间,保证模型轻量化,既让模型学会新内容,又牢牢记住旧知识,彻底避免"灾难性遗忘"。
2. 查询归一化目标适配器:解耦特征,实现跨域鲁棒的未知检测
对DETR解码器的查询特征做归一化处理,将特征的语义信息 和目标性信息解耦------特征方向代表物体类别语义,特征模长作为无类别差的目标性线索。该模块无需额外的监督信号和损失函数,仅通过原检测损失隐式训练,就能让模型在场景剧烈变化时,依然能精准判断"是否是物体",为后续未知检测打下基础,同时保证特征的域不变性。
3. 熵感知未知混合器:校准分数,实现精准的未知物体识别
结合分类不确定性 和目标性证据来校准未知物体的预测结果:将高目标性、高分类不确定性的区域精准标为"未知",避免其被误归为已知类别或背景;同时通过可学习的融合权重,结合分类器输出的未知概率和目标性推导的未知概率,生成最终的未知分数,还会对已知类分数做软抑制,进一步提升未知检测的准确性。该模块是轻量级的分数校准层,无需复杂的伪标注或外部分类器。
此外,团队还提出了FOGS(遗忘-开放-泛化分数) 综合评价指标,从旧知识保留能力(FSS) 、未知检测能力(OSS) 、跨域泛化能力(GSS) 三个维度,全面评估模型在EWOD范式下的性能,解决了现有指标无法全面衡量演化世界检测效果的问题。
三、实验结果
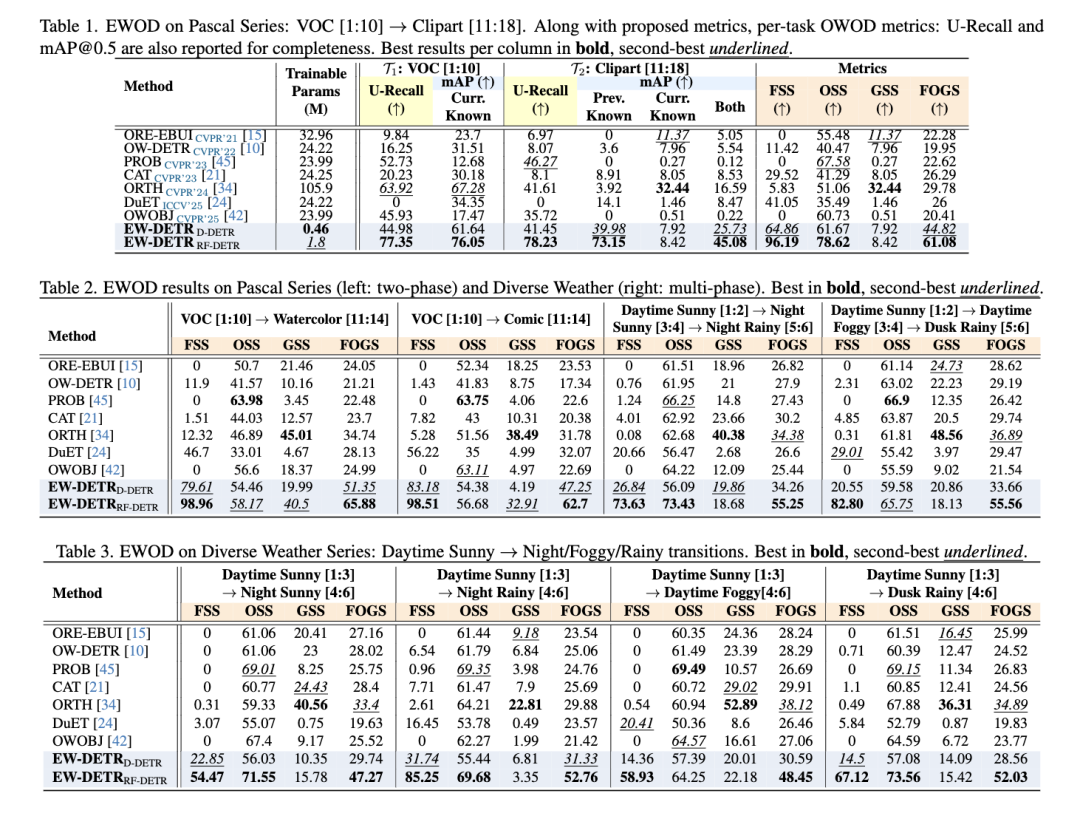
研究团队在Pascal系列 (VOC、剪贴画、水彩、漫画四个视觉域)和多天气系列(晴天白天、晴天夜晚、雨天夜晚、大雾白天、雨天黄昏五种天气场景)两大基准数据集上开展了大量实验,将EW-DETR与ORE、OW-DETR、PROB、DuET等当前主流的开放世界检测、域增量检测方法对比,结果表现亮眼:
-
综合性能领先 :EW-DETR在FOGS综合指标上实现了57.24% 的大幅提升,基于RF-DETR的EW-DETR版本更是取得了61.08的FOGS最高分,远超其他对比方法;
-
各维度表现均衡:在旧知识保留上,FSS(遗忘子分数)达到75.69,大幅优于其他易发生灾难性遗忘的方法;在未知检测上,OSS(开放子分数)达67.3,媲美专门做开放世界检测的PROB方法;同时保持了有竞争力的跨域泛化能力(GSS);
-
关键指标优异:在未知检测的核心指标上,EW-DETR的未知召回率最高达78.23,荒野影响(WI)低至0.0038,意味着未知物体的存在几乎不会降低已知类的检测精度,绝对开放集误差(A-OSE)也处于竞争水平;
-
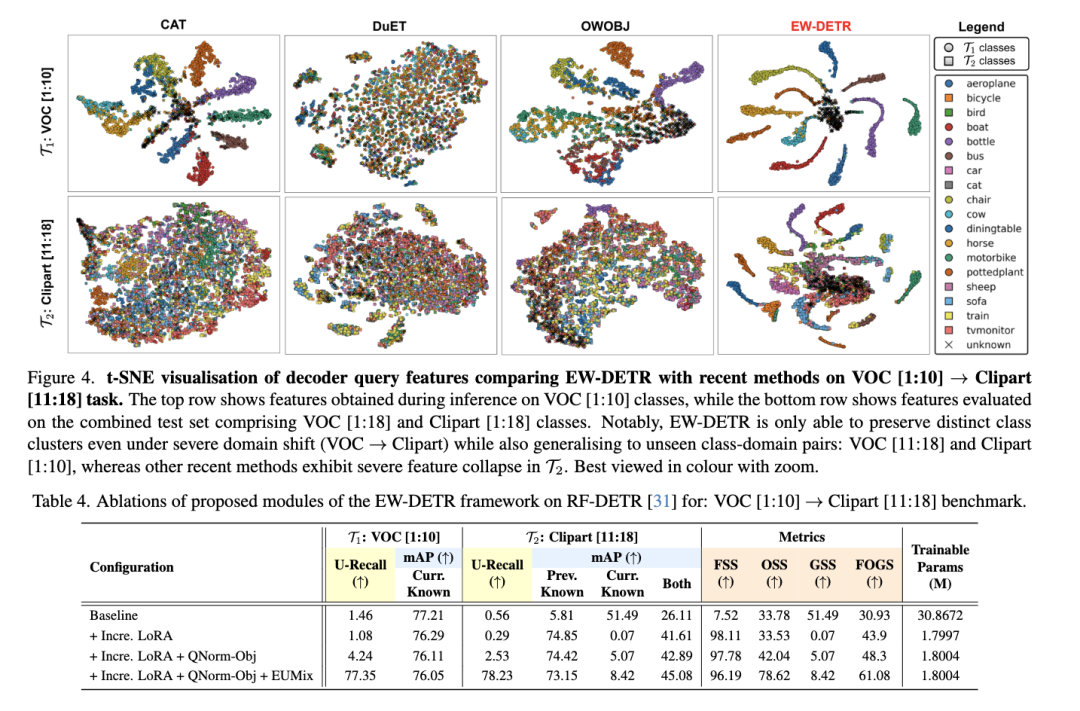
模块有效性验证:消融实验证明,三个核心模块缺一不可,增量LoRA适配器能将FSS从7.52提升至98.11,大幅缓解遗忘;后两个模块则持续提升未知检测和跨域泛化能力,三者协同实现最优性能。
同时,t-SNE特征可视化结果显示,EW-DETR在场景和类别发生双重变化时,仍能保持清晰的特征聚类,而其他方法会出现严重的特征坍缩,进一步验证了其在演化场景下的特征表达能力。
四、优势与局限
核心优势
-
首创EWOD范式,贴合真实需求:首次提出融合增量学习、域适配、未知检测的演化世界目标检测范式,打破了传统检测的封闭/固定场景假设,更符合自动驾驶、工业机器人等实际应用的需求;
-
无样本约束,实用性拉满:全程无需存储和复用任何旧数据样本,解决了隐私、存储带来的实际问题,相比依赖样本回放的方法,更适合落地部署;
-
轻量化、高效率:基于LoRA的低秩适配让模型训练参数大幅减少,基于RF-DETR的EW-DETR仅1.8M可训练参数,推理速度达57.38ms/张,内存占用仅0.32GB,兼顾轻量化和检测效率;
-
通用性强,易拓展:可直接适配所有DETR系列检测模型(如Deformable DETR、RF-DETR),无需大幅修改原模型架构,具有良好的通用性和拓展性;
-
评价体系完善:提出的FOGS指标能全面衡量演化世界检测的三大核心能力,为后续相关研究提供了统一、科学的评价标准。
现存局限
-
跨域泛化能力仍有提升空间:相比旧知识保留和未知检测的优异表现,EW-DETR的跨域泛化子分数(GSS)相对偏低,在新场景下对新学类别的检测效果仍需优化;
-
受任务数据分布影响:虽然通过数据感知融合缓解了数据不平衡问题,但当后续任务为数据稀缺的场景时,模型的跨域泛化能力仍会出现明显波动;
-
仅针对DETR系列模型:当前框架基于DETR的解码器查询特征设计,暂时无法直接迁移至Faster R-CNN等非Transformer类的检测模型,适用范围存在一定限制。
五、一句话总结
索尼印度研究院联合印度国际信息技术研究所提出的EW-DETR框架,首创了演化世界目标检测(EWOD)范式,通过增量LoRA适配器、查询归一化目标适配器和熵感知未知混合器三大核心模块,实现了无样本约束下的增量类别学习、跨域场景适配和精准未知检测,同时提出FOGS综合评价指标,大幅超越现有方法,为目标检测模型在动态真实世界的落地应用提供了全新的解决方案和研究方向。