目录
[2、 图解和公式](#2、 图解和公式)
[2.1 预测](#2.1 预测)
[2.2 更新](#2.2 更新)
解决线性问题的KF见:https://blog.csdn.net/weixin_39559465/article/details/159685860?spm=1001.2014.3001.5501
扩展卡尔曼滤波(Extended Kalman Filter,EKF)是解决非线性问题最直接、最经典的方法。它的思路很简单:在工作点附近,用线性函数来近似非线性函数。然后,就可以像标准卡尔曼滤波一样,使用线性系统的公式进行预测和更新,最后进行线性最小方差估计。
1、雅可比矩阵
从 映射到
的向量函数
,其雅可比矩阵J 是一个 m×n 的矩阵,定义为:
- 每一行对应一个输出函数的梯度。
- 每一列对应一个输入变量对所有输出的影响。
当输出维度为1(即标量函数)时,雅可比矩阵退化为**梯度向量;**当输入输出维度相等时,其行列式称为雅可比行列式,用于判断局部体积缩放与坐标变换中的方向保持性 。
雅可比矩阵描述了函数在某一点附近的最优线性逼近,即:
F(x+Δx)≈F(x)+J(x)Δx
2、 图解和公式
EKF 通过一阶泰勒展开对非线性函数进行局部线性化,从而将标准卡尔曼滤波的预测-更新框架应用于非线性系统。该过程依赖于雅可比矩阵(Jacobian Matrix)来近似非线性函数的导数。
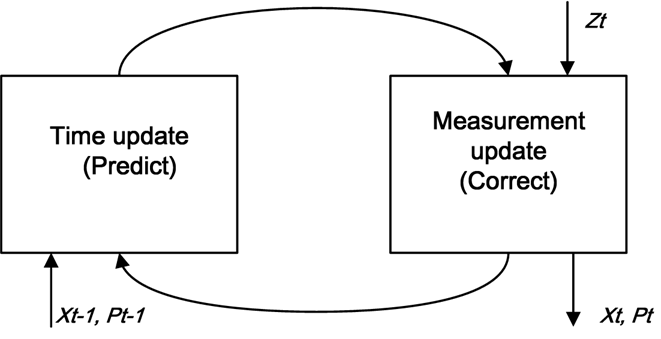
其中x代表的是状态向量(不可观察),大小为n*1;z是测量向量(可观察),大小为m*1;P是状态协方差矩阵。卡尔曼滤波的目标是基于上一时刻的状态向量和状态协方差矩阵预测当前时刻的状态向量和状态协方差矩阵,并基于测量向量对状态向量和状态协方差矩阵进行更新。
2.1 预测
基于时间的更新方程:
f是非线性的方程;矩阵F是函数 f 的偏导数的雅可比矩阵,大小为m*n;Q为过程噪声协方差。
2.2 更新
基于测量的更新方程:
矩阵H是函数 h的偏导数的雅可比矩阵。
3、EKF的局限性
扩展卡尔曼(EKF)与经典卡尔曼(KF)的区别在于测量矩阵H的计算。EKF对非线性函数进行泰勒展开后,进行一阶线性化的截断,忽略了其余高阶项,进而完成非线性函数的近似线性化。正是由于忽略了部分高阶项,使得EKF的状态估计会损失一些精度。
EKF在弱非线性系统中表现良好,但在强非线性条件下可能因高阶截断误差导致估计偏差甚至滤波发散,且其依赖繁琐的雅可比矩阵计算,实现难度较高 。作为改进思路,无迹卡尔曼滤波(UKF)和迭代扩展卡尔曼滤波(IEKF)等方法也被提出以提升估计精度与鲁棒性。