全文速览
触觉作为人类与物理世界交互最直接、最细腻的方式,是构建深度沉浸式人机交互、实现虚拟与现实无缝融合的关键一环。它不仅赋予了数字世界真实的生命力,更有望将日常物体转化为智能触觉终端,拓宽数字孪生与物理体感的边界。卡内基梅隆大学Carmel Majidi教授团队研发了一款轻便、柔性且可贴合皮肤的指尖触觉设备,该设备利用蛇形结构形状记忆合金(SSSA),实现了包括法向按压、切向滑移和圆周旋转在内的11种触觉模式。设备由柔软的3D打印指套和外壳组成,能够轻松贴合人类手指,可以应用于多种虚拟和现实世界交互活动,相关成果发表于Nature Electronics。
文章题目:A flexible skin-mounted haptic interface for multimodal cutaneous feedback
DOI:10.1038/s41928-025-01443-w
01
研究背景
人类手指具有复杂的神经系统,能够感知低至 0.1-0.2N的细微力变化和精细的多维力反馈,但现有触觉设备大多面临两大挑战:
-
硬件冗余:依赖电机和连杆结构,导致设备笨重且干扰自然的肢体运动;
-
反馈维度缺失:大多数设备仅能提供单一的法向按压或振动反馈,难以模拟现实中复杂的摩擦、揉搓、扭转等触感。
为解决这些难题,需要开发一种既能产生多自由度力触觉,又能像皮肤一样柔韧且共形贴合的轻量化触觉设备。
02
整体系统
本文旨在通过一个小型指尖设备(见图2),重建复杂的物理触感,该设备具有以下特性:
- 皮肤贴合设计:设备直接佩戴在用户指尖,轻薄且不影响手指的灵活性;
- 驱动核心:系统由四个SSSA组成,它们共同连接并控制中心的触点探针;
-
反馈多样性:通过精确控制SSSA的收缩,探针可在指尖切平面内实现切向、对角线及旋转的摩擦运动,并能产生垂直于皮肤的法向挤压感;
-
全场景应用:该设备不仅能增强VR环境下的真实物体感,还能在现实世界中提供方位指引、辅助导航和目标定位。
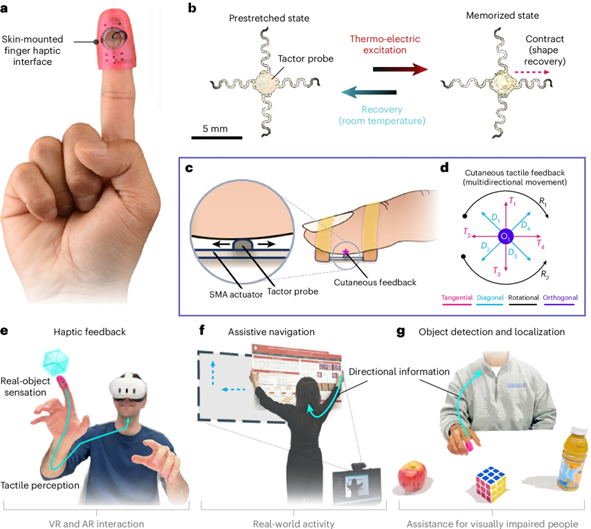
图2 皮肤贴附型形状记忆合金指尖触觉设备
03
核心技术
研究团队选择了镍钛合金(Nitinol)作为驱动材料,其机械能量密度远高于传统致动器(性能表征见图3)。
- 蛇形微加工:利用紫外激光微加工技术将形状记忆合金(SMA)片材刻画成蛇形纹路;这种设计使SMA在收缩时能产生巨大的应变和力输出,且在多次循环后不会发生永久变形;
- 拮抗式致动:四个SSSA呈对向排列,当一侧受热收缩时,对侧被拉伸产生抗力;由于SMA的升降温速度取决于其受到驱动电流的大小和时长,增加这种平衡机制可以帮助SSSA恢复初始状态,确保了探针位移的精确可控;(见视频1)
- 能量效率:通过优化线宽、振幅等参数,研究团队在0.8A的电流下实现了约0.5N的稳定力输出,足以达到人体感知的物理阈值。
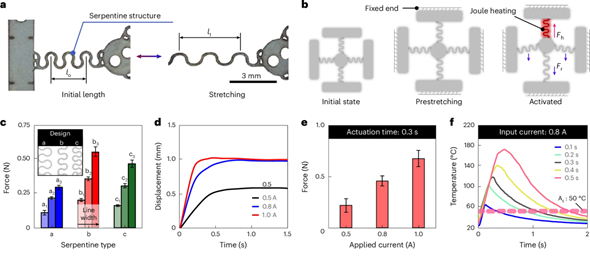
图3 SSSA性能表征
视频1 驱动频率提升措施
04
触觉模式解析
通过对SSSA的激活位置、数量以及顺序进行设定,该设备能够实现11种运动模式:
- 切向模式:通电激活单个SSSA,带动探针沿x、y单轴平移(4种运动);
- 对角模式:同时激活相邻的两个SSSA,产生对角合力完成平移,对角方向上产生的力大致为切向的根号2倍(4种运动);
- 旋转模式:按顺序依次激活SSSA,产生圆周路径运动(2种运动);
-
法向按压模式:同时激活四个SSSA,此时探针垂直压向指尖(1种运动);
全模式演示见图4和视频2。
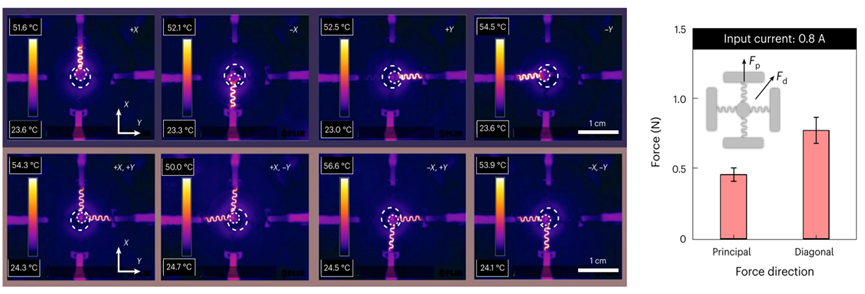
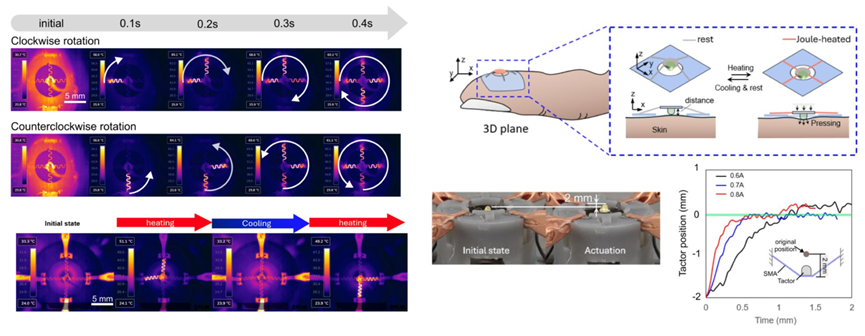
图4 各触觉模式中SSSA的激活方式
用户友好性与应用演示
- 用户友好性
为了确保长时间佩戴的舒适感与安全性,团队进行了深度优化:
-
柔性封装:采用3D打印的柔性指套(模量1.7MPa)和弹性保护套(模量1.3MPa)进行组装,这使得设备能够随手指自由折叠、扭转,甚至在使用筷子时仍能维持良好的反馈稳定性。
-
热安全管理:虽然SMA激活时温度会达到50℃以上,但由于设计了空气间隙与绝缘探针,实测皮肤表面温度仅在29℃至36℃之间,远低于安全阈值。
此外,通过用户主观性测试实验,验证了该指尖触觉接口各模式间的可辨识性和模式输出的可靠性(仅有对角模式评分低于97.5)。
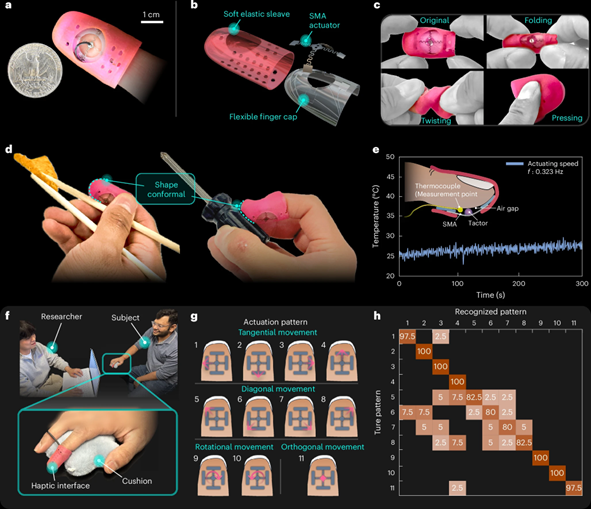
图5 柔性指套可穿戴性展示和用户主观性测试
- 应用演示
研究团队通过无线WiFi IoT控制系统演示了多项应用场景:
- 沉浸式VR
在Unity环境中触摸虚拟方块,指套会同步产生相应的多模态触觉反馈,模拟物理接触时受到的阻力。(见图6和视频3)
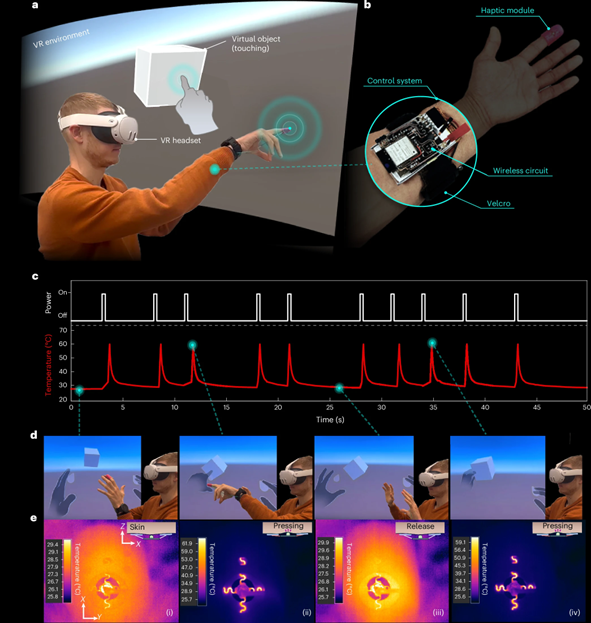
图6 虚拟现实场景物体交互
视频详情
视频3 沉浸式VR演示
- 真实世界感官辅助
在悬挂画作任务中,系统根据视觉算法计算偏差,通过旋转或平移触觉信号指引用户调整方位。(见图7和视频4)
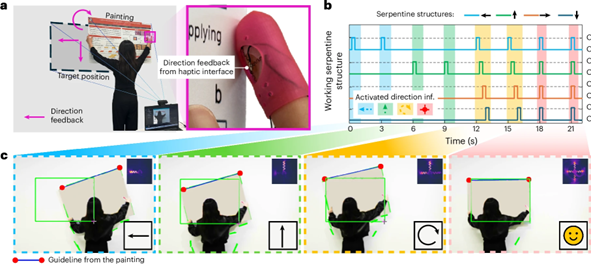
图7 真实世界日常任务辅助
视频详情
视频4 壁画悬挂辅助演示
- 视障人士辅助导航
配合YOLOv5实时目标检测,将物体相对手部的位置转化为指向性触感,引导视障用户在复杂桌面上准确抓取目标。(见图8和视频5)
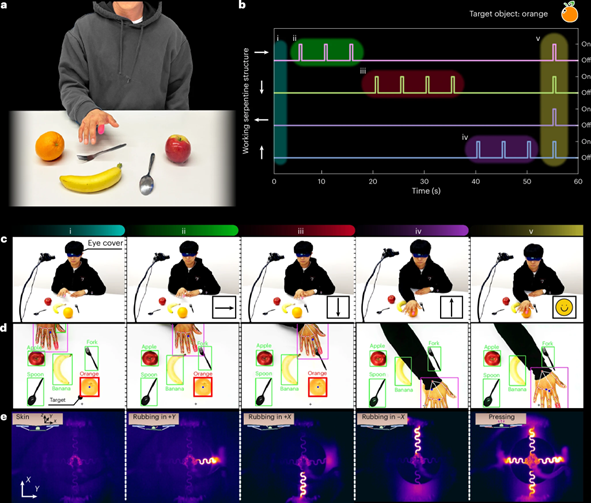
图8 视觉障碍用户物体抓取辅助
视频详情
视频5 目标物体抓取的辅助导航演示
06
总结
本研究通过集成SSSA与柔性3D打印封装,在触觉交互领域实现了重要突破:
- 硬件尺寸:成功将原本笨重的刚性致动系统微缩并柔性化,开发出仅需指尖佩戴的皮肤集成式接口,显著提升了日常使用的便携性与舒适度。
-
反馈维度:从传统的单一振动维度转变为多轴剪切力、法向挤压及旋转摩擦的组合,为用户提供了多达11种可编程的时空触觉模式。
-
交互效率:利用拮抗式控制策略和无线IoT平台,实现了高速响应与高准确率交互,证明了设备在VR环境与现实导航中的可靠性。