在智能制造与智能物流快速发展的背景下,机器人控制系统(RCS)作为 AGV 集群的"大脑中枢",其核心算法的设计与优化直接决定了整个系统的运行效率和稳定性。
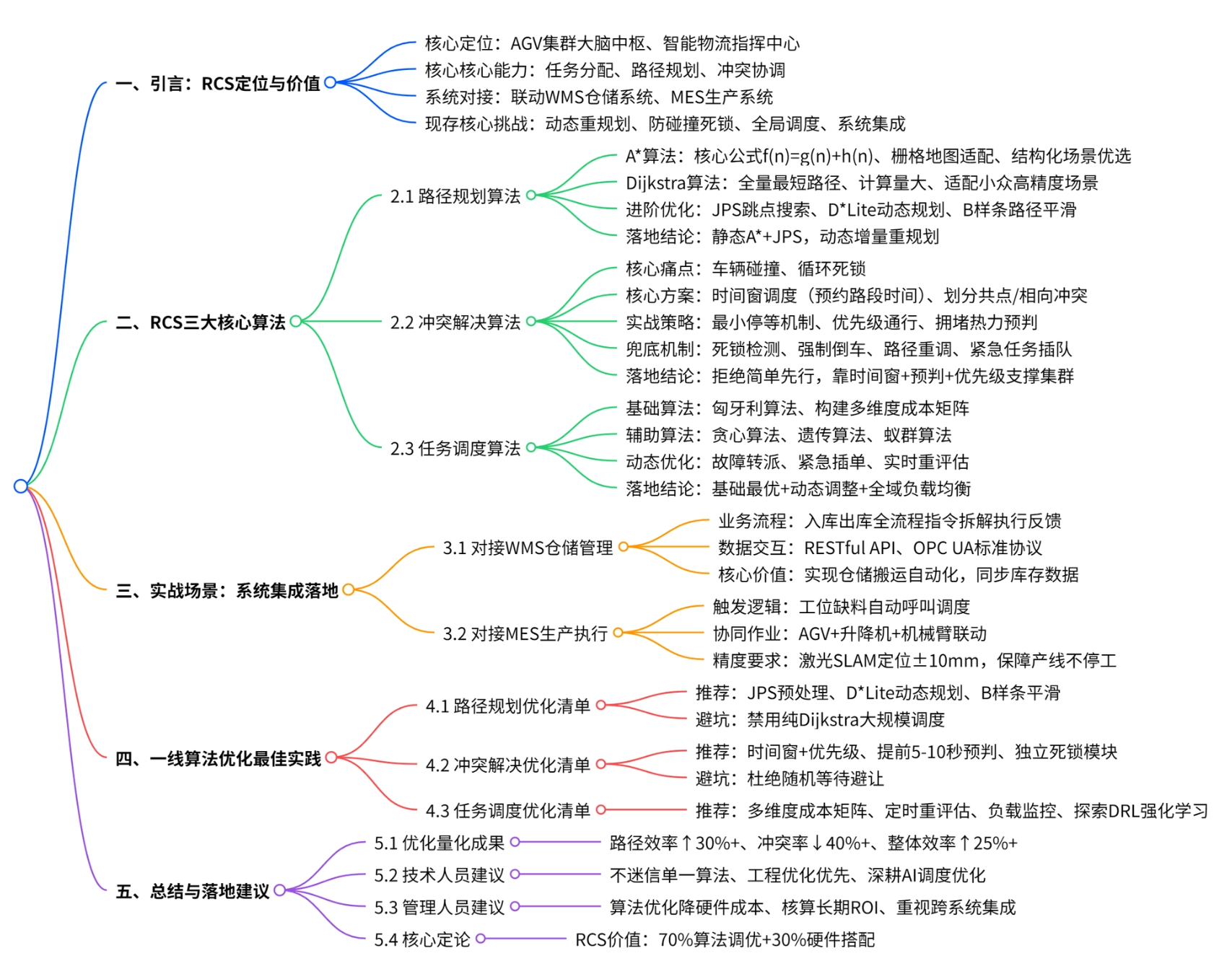
本文系统分析了 RCS 系统中的三大核心算法------路径规划、冲突解决、任务调度,深入探讨 A*、Dijkstra、时间窗调度、匈牙利算法等关键技术在 AGV 调度中的应用原理,并结合仓储物流场景,阐述 RCS 如何与 WMS、MES 集成,实现物料搬运智能化。通过 Python 示例为开发人员提供实现思路,也为管理人员揭示算法优化带来的实际价值。
一、引言:为什么 RCS 是智能物流的"指挥中心"?
工业 4.0 时代,企业竞争力越来越依赖于生产与物流的自动化水平。AGV(自动导引车)作为物料搬运的核心设备,其背后真正起作用的是它的"大脑"------**机器人控制系统(RCS)**。
- RCS 不只是调度几台小车那么简单 ,它要完成三件大事:
- 任务分配:谁去搬什么?
- 路径规划:怎么走最快最安全?
- 冲突协调:多车相遇怎么办?
- 在实际工厂或仓库中,RCS 还必须和两大系统打通:
- **WMS(仓储管理系统)**:告诉 RCS "要搬什么、从哪到哪"
- **MES(制造执行系统)**:告诉 RCS "产线缺料了,快送过来"
💡 举个例子:
某汽车厂生产线突然缺一个发动机支架,MES 立刻通知 RCS。RCS 查看当前有 5 台空闲 AGV,其中 2 台电量低、1 台在充电、2 台刚完成任务。它会选一台距离最近、电量充足、载具匹配 的 AGV,规划一条避开拥堵区域的路径,确保 3 分钟内送达------整个过程全自动,无需人工干预。
当前 RCS 面临的核心挑战包括:
- 动态环境下的实时路径重规划
- 多 AGV 的死锁与碰撞避免
- 任务分配的全局最优 vs 实时响应
- 与上层系统的无缝集成
这些问题的答案,藏在三大核心算法里。
二、RCS 三大核心算法详解
2.1 路径规划算法:如何让 AGV 走得又快又稳?
A 算法:静态地图中的"黄金标准"
- 核心公式 :
f(n) = g(n) + h(n)g(n):起点到当前点的实际代价(比如走了 5 格)h(n):启发式估计(比如曼哈顿距离|x1-x2| + |y1-y2|)
✅ *为什么用 A?**
它在保证找到最短路径的同时,搜索效率远高于暴力法。在结构化仓库(如货架整齐排列)中表现极佳。
- 工程实现要点 :
- 地图栅格化:每个格子标记为 0(可通行)或 1(障碍)
- 移动代价:横向/纵向 = 10,对角线 = 14(模拟真实运动成本)
- 开放列表(open_list)存待探索点,关闭列表(close_list)存已处理点
Dijkstra 算法:100% 最短,但慢
- 适合对路径精度要求极高、节点不多的场景(如网络路由)
- 缺点:计算量大,不适合大规模 AGV 场景
改进方向:让路径更"聪明"
- **跳点搜索(JPS)**:预处理地图,跳过无用节点,速度提升 10 倍 +
- 混合策略:全局用 Dijkstra 保最优,局部用 A* 提速度
- 动态重规划:检测到前方堵车或障碍,立即重新算路
- 路径平滑:用 B 样条曲线消除急转弯,减少机械磨损
🔴 关键结论:
*在已知静态地图中,A + JPS 是性价比最高的组合;在动态环境中,必须加入增量式重规划机制。**
2.2 冲突解决算法:多车协同不打架
多 AGV 最怕什么?撞车 和 死锁(你等我,我等你,谁都动不了)。
时间窗调度(Time Window Scheduling):给每段路"预约时间"
- 为 AGV 路径上的每个节点分配时间戳
- 检测两类冲突:
- 共点冲突:两车同一时间到同一点 → 让一辆车等
- 相向冲突:两车在相邻时间交换位置 → 极易死锁,必须提前规避
✅ 实战技巧:采用"最小化停等次数"策略------尽量让任务少、电量低的车等待,高优先级任务优先通行。
空间模型 + 时间窗热力图
- 实时监控 AGV 位置,预测未来 10 秒可能的碰撞点
- 热力图显示"拥堵高发区",主动绕行
死锁检测与恢复
- 当系统检测到循环等待(A 等 B,B 等 C,C 等 A),立即介入:
- 强制某车倒车
- 重新分配任务
- 调整路径顺序
优先级机制:紧急任务插队
- 优先级依据:任务紧急度、AGV 电量、是否产线缺料
- 例如:产线停线风险 > 普通入库任务
🔴 关键结论:
单纯靠"谁先到谁先走"会频繁死锁。必须结合时间窗 + 优先级 + 预测性避让,才能支撑百台以上 AGV 协同。
2.3 任务调度算法:把活儿分得刚刚好
任务来了,派给哪台 AGV?这不是"就近原则"能解决的。
匈牙利算法:多对多任务的最优解
- 适用场景:n 台 AGV 分配 n 个任务(或通过虚拟 AGV 扩展)
- 优势:O(n³) 时间复杂度,比暴力搜索(n!)快几个数量级
- 成本矩阵构建要素 :
- 距离(越近越好)
- 电量(别让快没电的跑长途)
- 载具类型(叉车不能搬潜伏式托盘)
- 任务紧急度(加权)
✅ 工程技巧:当任务数 ≠ AGV 数,添加"虚拟 AGV"或"虚拟任务",补成方阵再算。
动态任务分配:应对突发状况
- AGV 故障?立刻把任务转给其他车
- 新增紧急订单?插入高优先级队列
高级优化策略
| 算法 | 原理 | 应用案例 |
|---|---|---|
| 贪心算法 | 先做最紧急、最近的 | 产线缺料优先配送 |
| 遗传算法 | 模拟进化,找全局最优 | 青岛港单箱作业时间 ↓15% |
| 蚁群算法 | 信息素引导,自组织均衡 | 南通港多车负载均衡 |
🔴 关键结论:
匈牙利算法是基础,但真实场景必须叠加动态调整、负载均衡、多因素评分,才能避免"有的车累死,有的车晒太阳"。
三、实战场景:RCS 如何与 WMS/MES 打通?
3.1 与 WMS 集成:仓储自动化的"最后一公里"
- 三层架构 :
- WMS:下指令("把 A 物料从库位 101 搬到 205")
- RCS:拆解任务、调度 AGV、反馈状态
- AGV:执行搬运
- 典型流程 (入库):
- WMS 收到入库单 → 生成任务
- RCS 选 AGV → 规划路径 → AGV 取货 → 送货 → 回传完成
- WMS 更新库存
- 数据交互:通过 RESTful API 或 OPC UA,传递物料编码、库位、优先级等
3.2 与 MES 集成:产线不停工的保障
- 触发机制:工位扫码缺料 → MES 自动呼叫 RCS
- 精度要求:±10mm 定位(配合激光 SLAM)
- 协同设备:AGV + 升降机 + 机械臂 联动作业
💡 案例:汽车底盘装配线,RCS 调度 AGV 送到底盘工位,同时通知升降机抬升至 80cm,机器人开始拧螺丝------全程无人干预。
四、算法优化最佳实践(来自一线经验)
4.1 路径规划优化清单
- ✅ 用 JPS 预处理地图
- ✅ 动态环境用 D* Lite 或增量 A*
- ✅ 路径后处理:B 样条平滑
- ❌ 避免纯 Dijkstra(太慢)
4.2 冲突解决优化清单
- ✅ 时间窗 + 优先级双保险
- ✅ 引入预测性避让(提前 5~10 秒干预)
- ✅ 死锁检测必须独立模块
- ❌ 别依赖"随机等待"(效率暴跌)
4.3 任务调度优化清单
- ✅ 成本矩阵至少包含:距离、电量、紧急度
- ✅ 每 5~10 秒重新评估任务分配(动态调度)
- ✅ 负载均衡:监控每台 AGV 日均任务量
- ✅ 探索 DRL(深度强化学习)用于长期优化
五、总结与建议
核心成果回顾
- 路径效率 ↑30%+:A* + JPS + 平滑
- 冲突率 ↓40%+:时间窗 + 预测避让
- 系统整体效率 ↑25%+:匈牙利 + 动态调度 + 负载均衡
最后说一句:
RCS 不是"买了就能用"的黑盒子,它的价值70% 来自算法调优,30% 来自硬件。只有懂业务、懂算法、懂集成的团队,才能真正释放 AGV 集群的潜力。