laser_line_extraction 功能包介绍
laser_line_extraction 是一个功能明确的 ROS 软件包,专门用于从二维激光雷达数据中实时提取直线线段。
一、包的核心功能与处理流程
该包订阅激光扫描话题(通常为 /scan),对每一帧点云执行两个主要步骤:
1. 点云分割
首先剔除距离超出设定范围(min_range、max_range)或孤立的噪点(outlier_dist)。然后采用分割合并算法,根据相邻点之间的欧氏距离是否超过阈值 max_line_gap 将点云划分为不同的候选点簇,每个点簇可能对应环境中的一条直线结构。
2. 线段拟合
对每个候选点簇,使用加权最小二乘法迭代拟合最优直线。该方法来源于 Pfister 等人的论文,能够同时输出线段在极坐标下的参数(距离 radius 和角度 angle)以及这些参数的协方差矩阵,从而反映拟合的不确定性。拟合结果再经处理得到线段端点的笛卡尔坐标。
二、消息结构
包内定义了两种自定义消息类型:
-
LineSegment.msg
:描述单条线段,包含以下字段
-
float32 radius:极坐标系下原点到线段所在直线的距离
-
float32 angle:线段法向量的角度(范围通常为 [-π/2, π/2))
-
float32[2] start和
float32[2] end:线段端点的笛卡尔坐标 -
float32[4] covariance:
radius和angle的协方差矩阵
-
-
LineSegmentList.msg
:表示一帧激光数据中提取的所有线段,内含
LineSegment[]数组和时间戳。
三、安装与使用
1. 获取源码
bash
cd ~/catkin_ws/srcgit clone https://github.com/kam3k/laser_line_extraction.gitcd ~/catkin_wscatkin_make2. 参数配置
基础配置
包的所有参数通过 ROS 参数服务器加载,官方推荐将参数写入 launch 文件进行管理。关键参数及其作用如下:
| 参数名 | 默认值 | 说明 |
|---|---|---|
scan_topic |
"scan" |
订阅的激光话题名 |
frame_id |
"laser" |
发布线段的参考坐标系 |
publish_markers |
false |
是否发布可视化标记(用于 RViz 调试) |
算法相关的参数配置
| 参数名 | 默认值 | 说明 |
|---|---|---|
min_line_length |
0.5 m | 线段最小长度,短于此值的线段被丢弃 |
max_line_gap |
0.4 m | 点云分割时允许的最大间隔 |
outlier_dist |
0.05 m | 孤立点判定阈值 |
min_line_points |
9 | 构成一条线段所需的最少点数 |
bearing_var |
- | 方位方差 |
range_var |
- | 距离方差 |
least_sq_angle_thresh |
- | 改变角度(rad)阈值以停止迭代最小二乘法(还必须满足 least_sq_radius_thresh) |
least_sq_radius_thresh |
- | 改变半径(m)阈值,以停止迭代最小二乘法(还必须满足 least_sq_angle_thresh) |
max_line_length |
- | 大于此长度的行未发布(m) |
min_range |
- | 比这更近的点将被忽略(m) |
max_range |
- | 超过此值的点将被忽略(m) |
min_split_dist |
- | 当执行拆分和合并的"拆分"步骤时,两个点相距至少这么远(m)会导致拆分 |
outlier_dist |
- | 与所有邻居相距至少该距离的点被视为异常值(m) |
3. 运行节点
创建 launch 文件后,执行:
bash
roslaunch laser_line_extraction your_config.launch节点将发布两个话题:
-
/line_segments(
laser_line_extraction/LineSegmentList):检测到的线段列表 -
/line_markers(
visualization_msgs/MarkerArray):用于 RViz 显示的线段标记(若publish_markers为true)
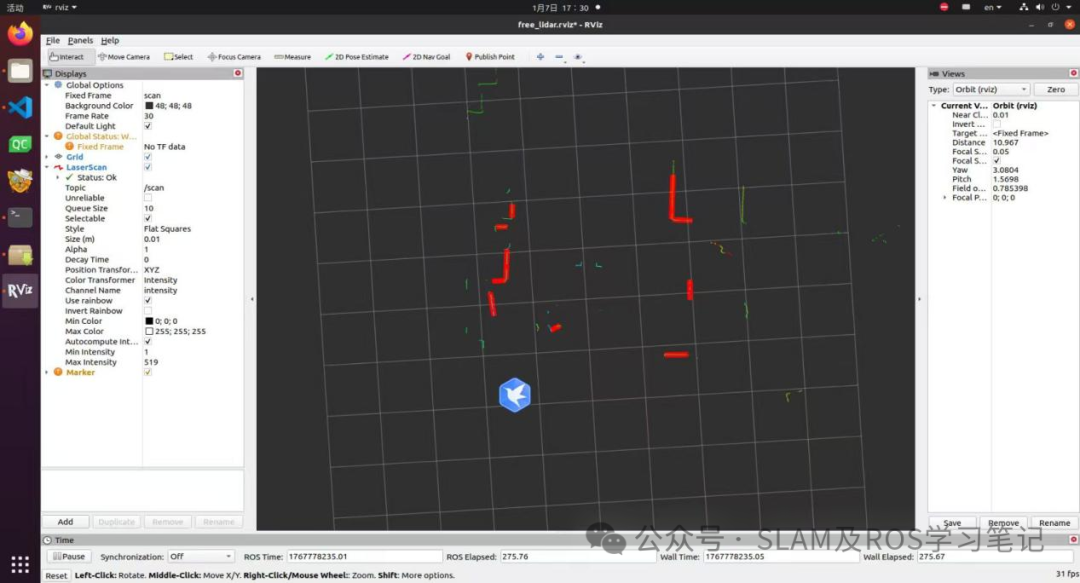
4. 运行的效果
绿色的雷达原始的点云,红色提取出的线段。
四、关键代码解读
1. 最小二乘线拟合方法
cpp
void Line::leastSqFit(){ // 第一步:计算点的协方差矩阵 calcPointCovariances(); // 第二步:初始化前一次迭代的参数值 // 用于判断收敛条件(当前参数与上一次参数的差值) double prev_radius = 0.0; double prev_angle = 0.0; // 第三步:迭代优化循环 // 当半径或角度的变化超过阈值时继续迭代 while (fabs(radius_ - prev_radius) > params_.least_sq_radius_thresh || fabs(angle_ - prev_angle) > params_.least_sq_angle_thresh) { prev_radius = radius_; prev_angle = angle_; // 计算点的标量协方差 calcPointScalarCovariances(); // 基于最小二乘原理重新计算半径 // 通过优化方法得到更精确的半径值 radiusFromLeastSq(); // 基于最小二乘原理重新计算角度 // 通过优化方法得到更精确的角度值 angleFromLeastSq(); } // 第四步:计算线段的协方差矩阵 // 反映拟合线段参数的不确定性 calcCovariance(); // 第五步:投影端点 // 将线段的端点投影到拟合的直线上,确保端点在线上 projectEndpoints();}2. 主要的识别线段函数
cpp
void LineExtraction::extractLines(std::vector<Line>& lines) { filtered_indices_ = c_data_.indices; lines_.clear();
// 过滤近距离和远距离点 filterCloseAndFarPoints(); // 过滤异常点 filterOutlierPoints();
// 如果剩余点不够,则不返回任何线段 if (filtered_indices_.size() <= std::max(params_.min_line_points, static_cast<unsigned int>(3))) { return; }
// 将索引拆分为线段并过滤掉短行和稀疏线段 split(filtered_indices_); // 根据线段的最大最小长度,过滤线段 filterLines();
// 使用最小二乘法拟合每条直线并合并共线段 for (std::vector<Line>::iterator it = lines_.begin(); it != lines_.end(); ++it) { it->leastSqFit(); } // 如果有多线段,检查是否应根据合并条件合并线段 if (lines_.size() > 1) { mergeLines(); } lines = lines_;}3. 使用贝叶斯估计框架合并线段
cpp
void LineExtraction::mergeLines(){ std::vector<Line> merged_lines;
for (std::size_t i = 1; i < lines_.size(); ++i) { // Get L, P_1, P_2 of consecutive lines Eigen::Vector2d L_1(lines_[i-1].getRadius(), lines_[i-1].getAngle()); Eigen::Vector2d L_2(lines_[i].getRadius(), lines_[i].getAngle()); Eigen::Matrix2d P_1; P_1 << lines_[i-1].getCovariance()[0], lines_[i-1].getCovariance()[1], lines_[i-1].getCovariance()[2], lines_[i-1].getCovariance()[3]; Eigen::Matrix2d P_2; P_2 << lines_[i].getCovariance()[0], lines_[i].getCovariance()[1], lines_[i].getCovariance()[2], lines_[i].getCovariance()[3];
// Merge lines if chi-squared distance is less than 3 if (chiSquared(L_1 - L_2, P_1, P_2) < 3) { // Get merged angle, radius, and covariance Eigen::Matrix2d P_m = (P_1.inverse() + P_2.inverse()).inverse(); Eigen::Vector2d L_m = P_m * (P_1.inverse() * L_1 + P_2.inverse() * L_2); // Populate new line with these merged parameters boost::array<double, 4> cov; cov[0] = P_m(0,0); cov[1] = P_m(0,1); cov[2] = P_m(1,0); cov[3] = P_m(1,1); std::vector<unsigned int> indices; const std::vector<unsigned int> &ind_1 = lines_[i-1].getIndices(); const std::vector<unsigned int> &ind_2 = lines_[i].getIndices(); indices.resize(ind_1.size() + ind_2.size()); indices.insert(indices.end(), ind_1.begin(), ind_1.end()); indices.insert(indices.end(), ind_2.begin(), ind_2.end()); Line merged_line(L_m[1], L_m[0], cov, lines_[i-1].getStart(), lines_[i].getEnd(), indices); // Project the new endpoints merged_line.projectEndpoints(); lines_[i] = merged_line; } else { merged_lines.push_back(lines_[i-1]); }
if (i == lines_.size() - 1) { merged_lines.push_back(lines_[i]); } } lines_ = merged_lines;}