一、前言
最近使用ABB1200系列机器人,针对进行外部Socket通信配置;
这里用软件系统软件版本6.16.02,控制柜为IRC5举例:

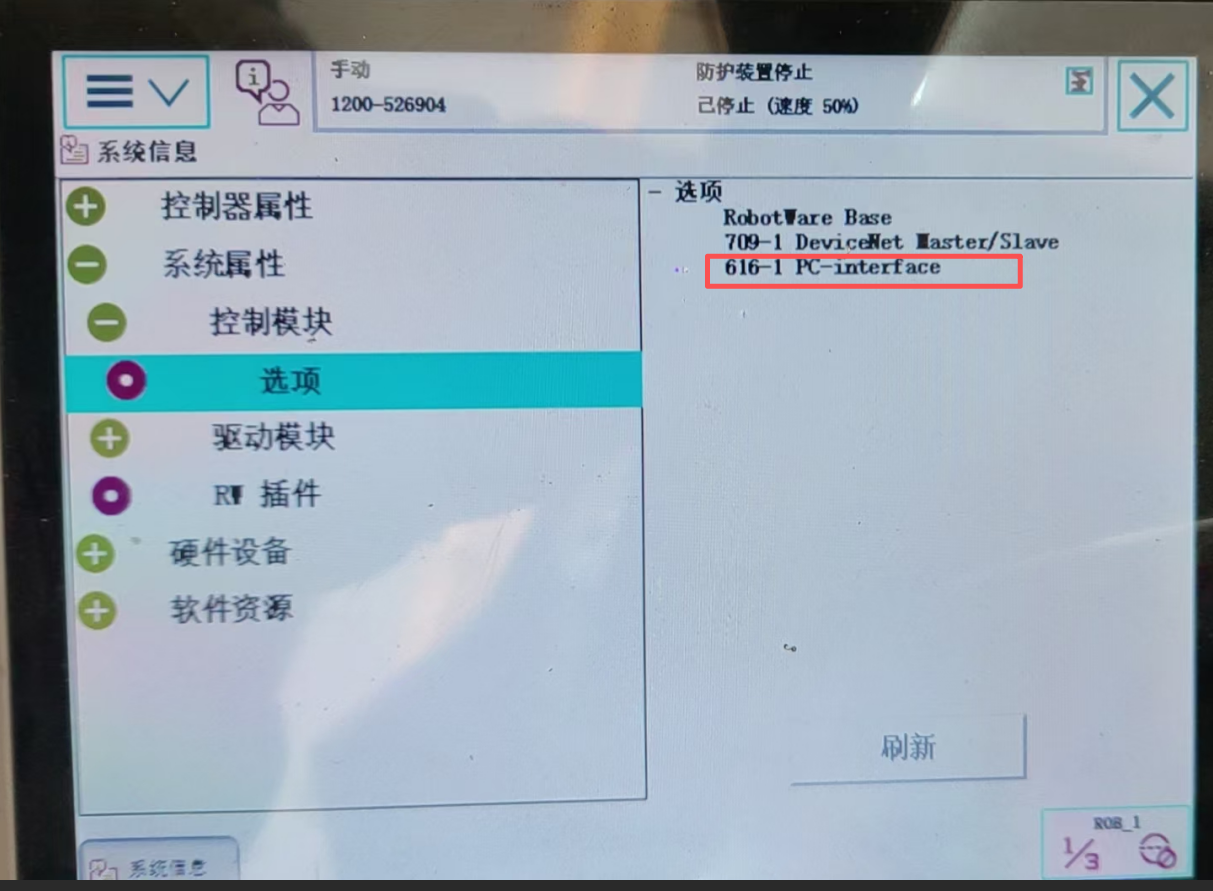
实现前提机器人"系统信息"中必须要有如下截图的模块:"616-1 PC-interface"
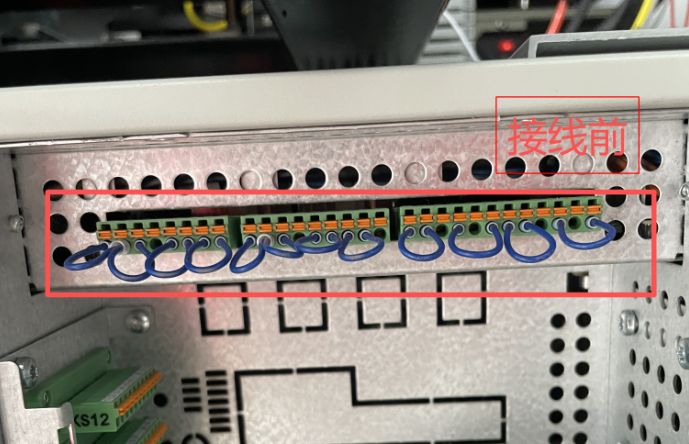
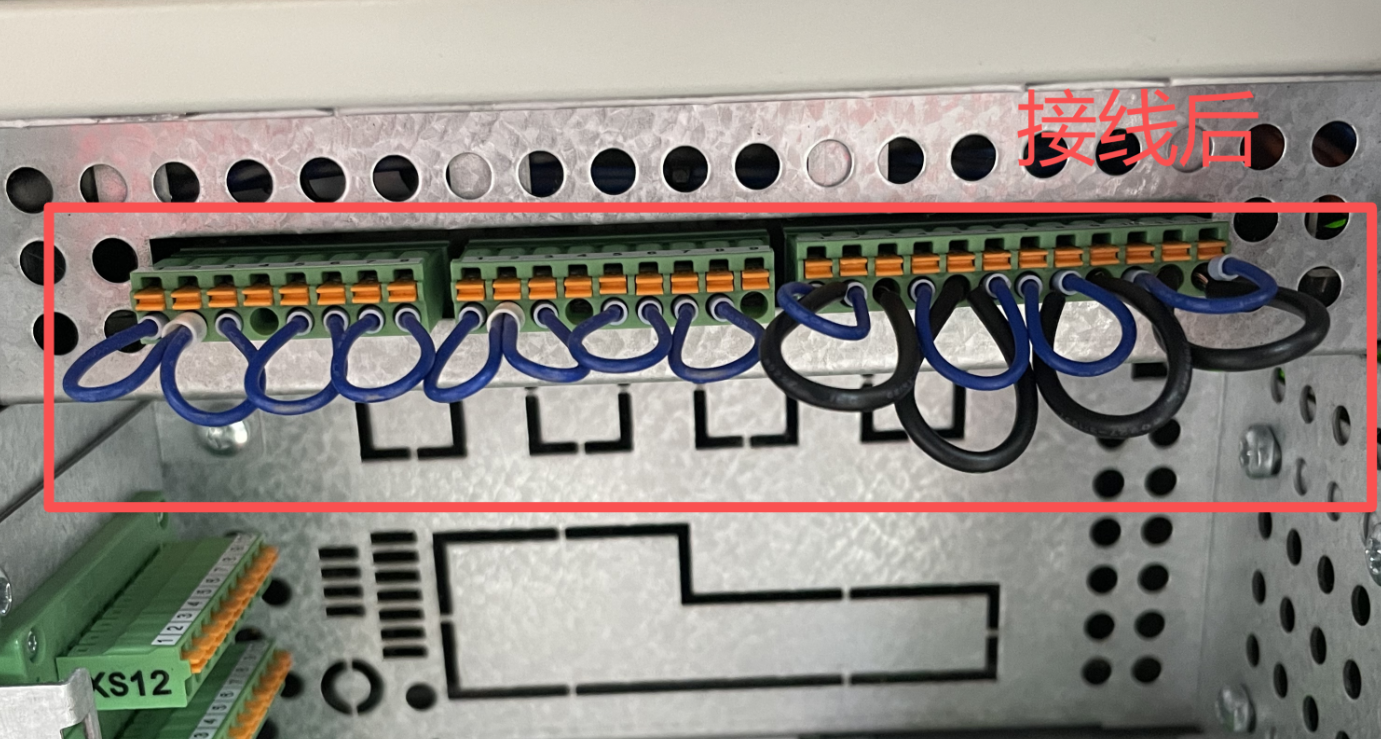
设备采用Socket通信的话,必须要短接一下以下接线:
二、IP配置
1、网口介绍
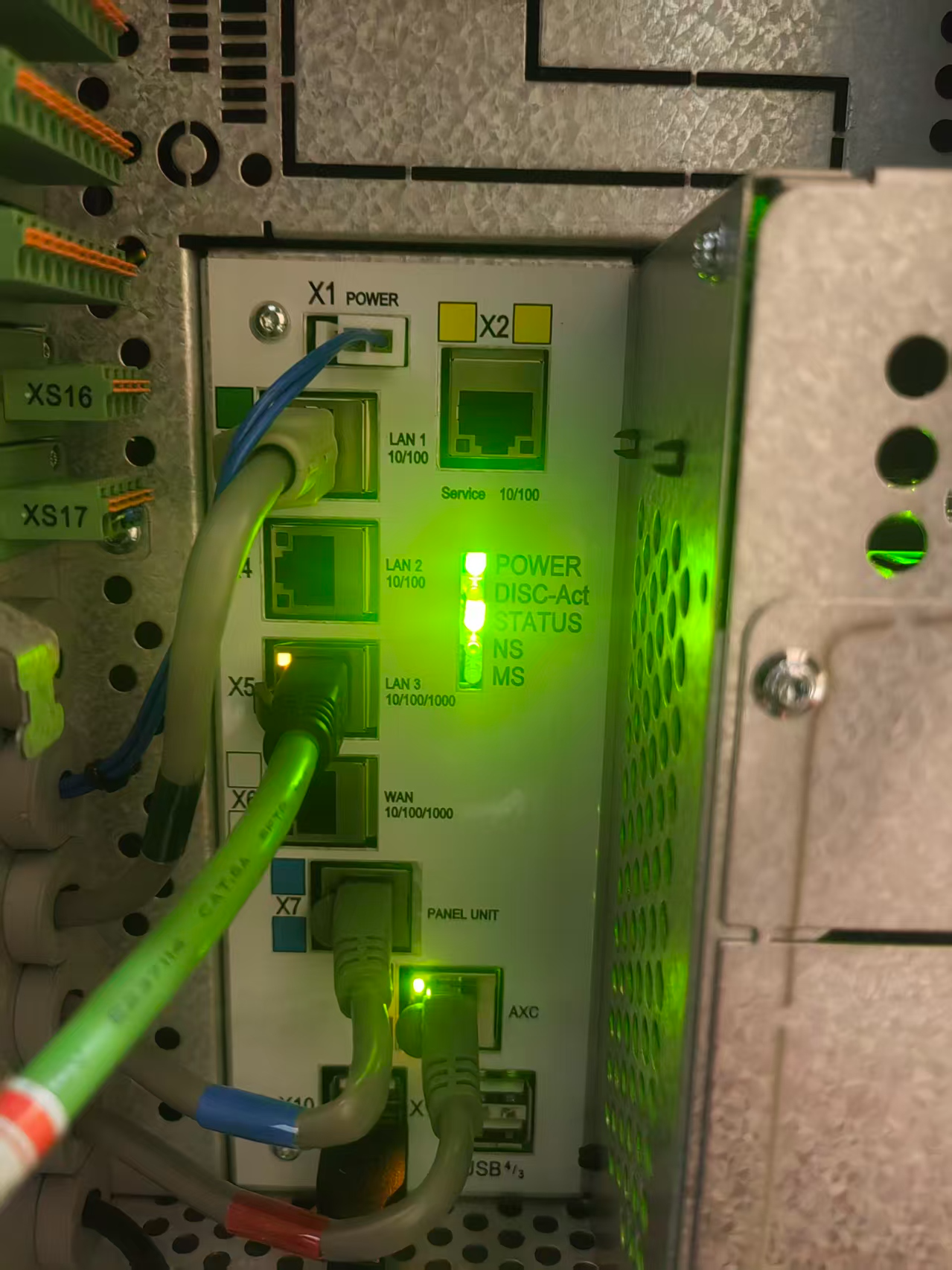
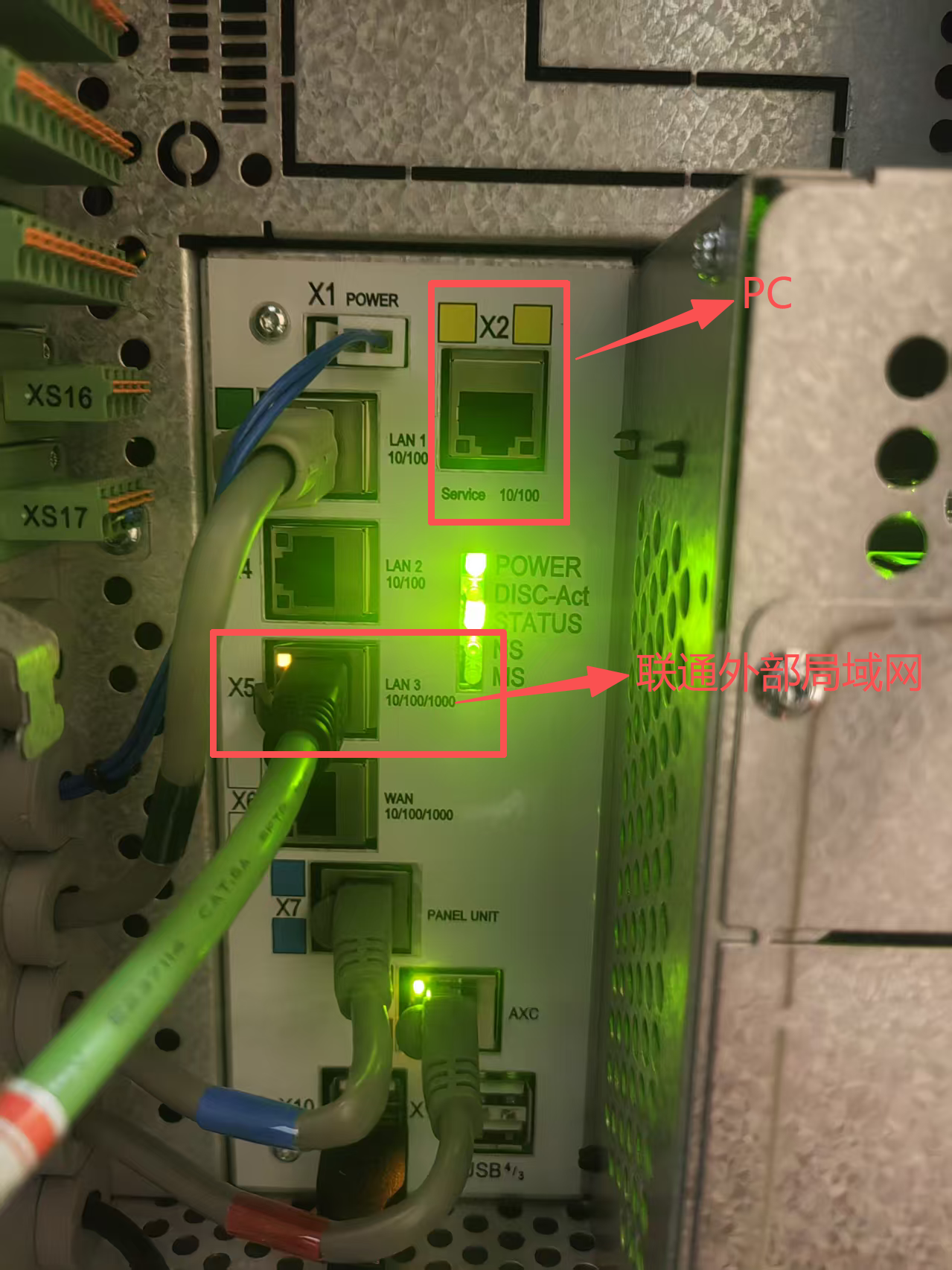
X2:默认网口,这里用于机器人控制,以及配置传输文件的,默认IP地址为"192.168.125.1",如下图:
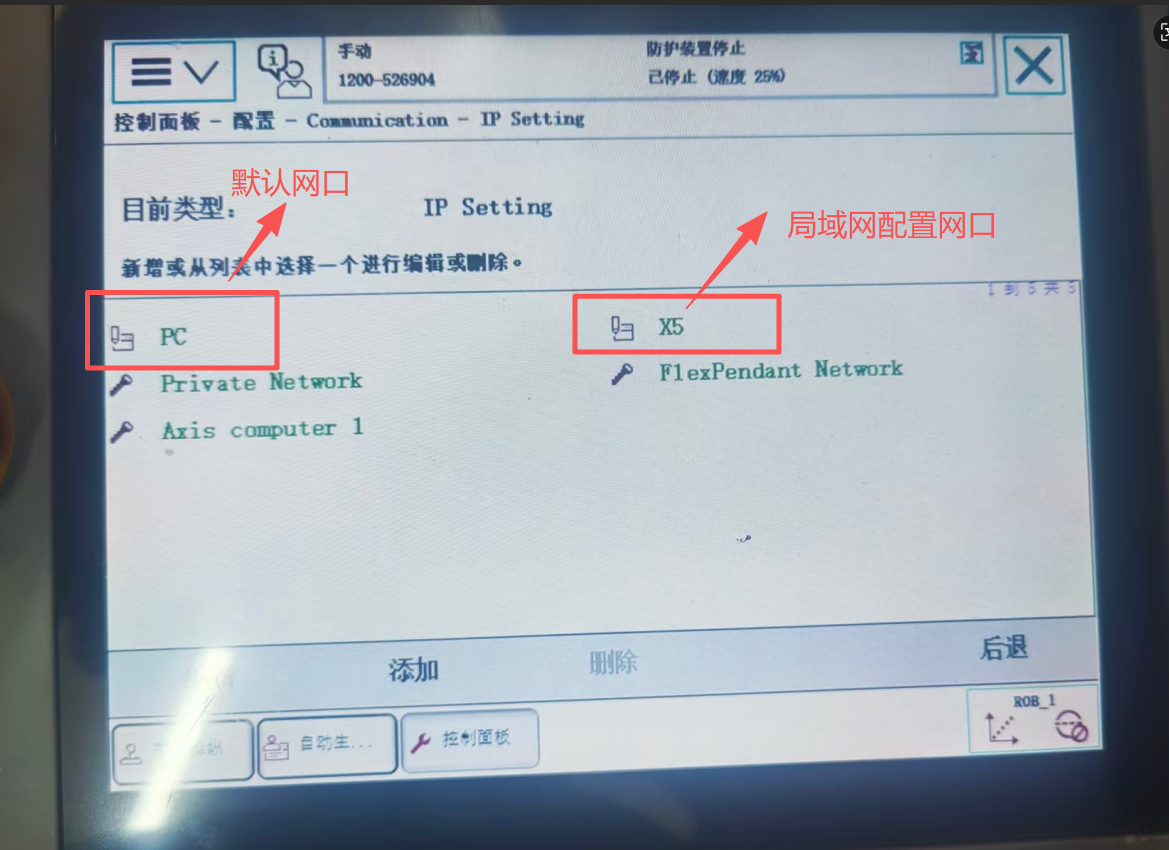
"控制面板"->"配置"->"Communication"->"IP Setting"
这里PC网口对应的就是X2,默认不能修改;
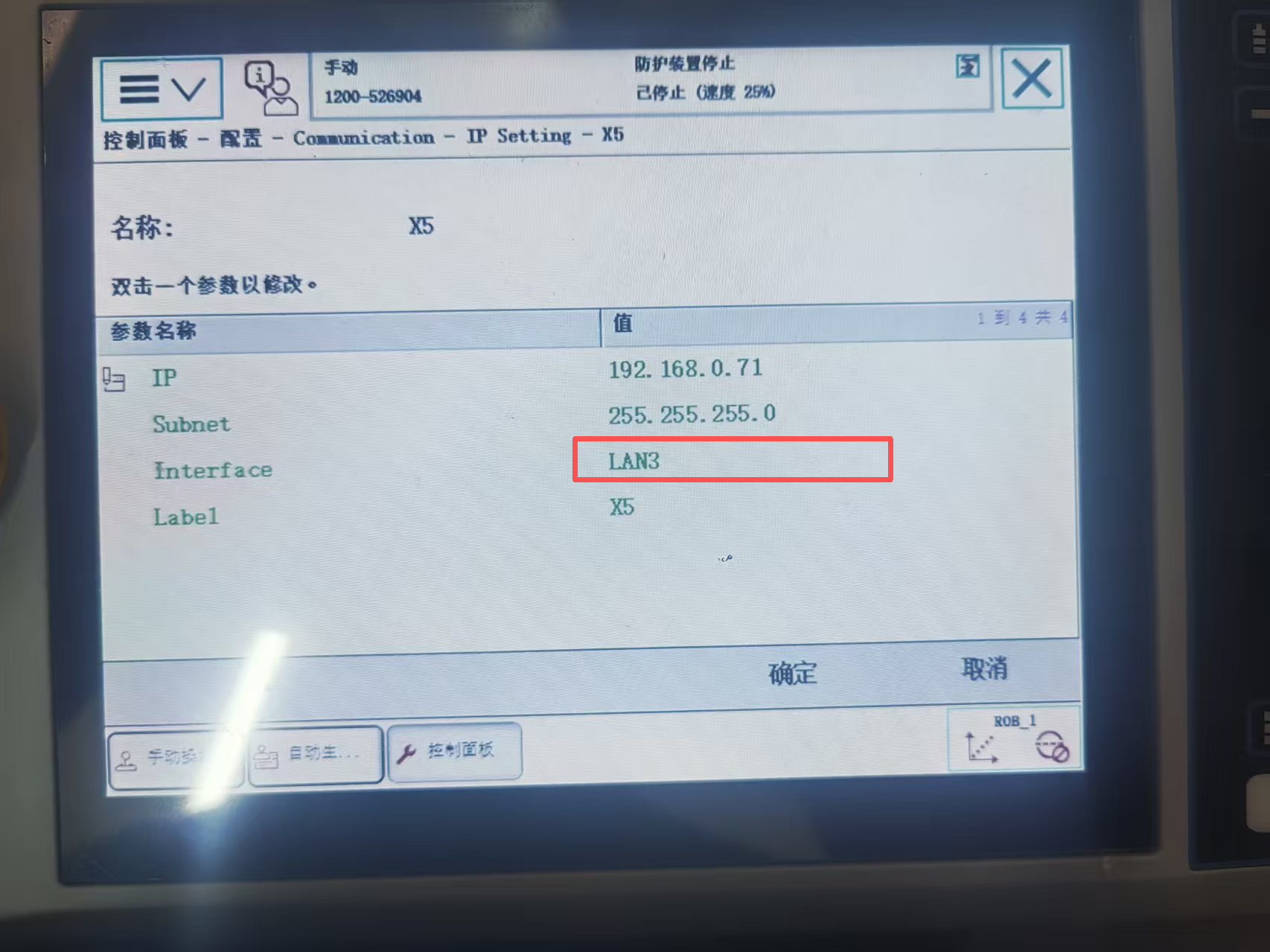
2、IP设置
针对上述硬件截图,可知,这里外部网线连接在X5网络配置如下:
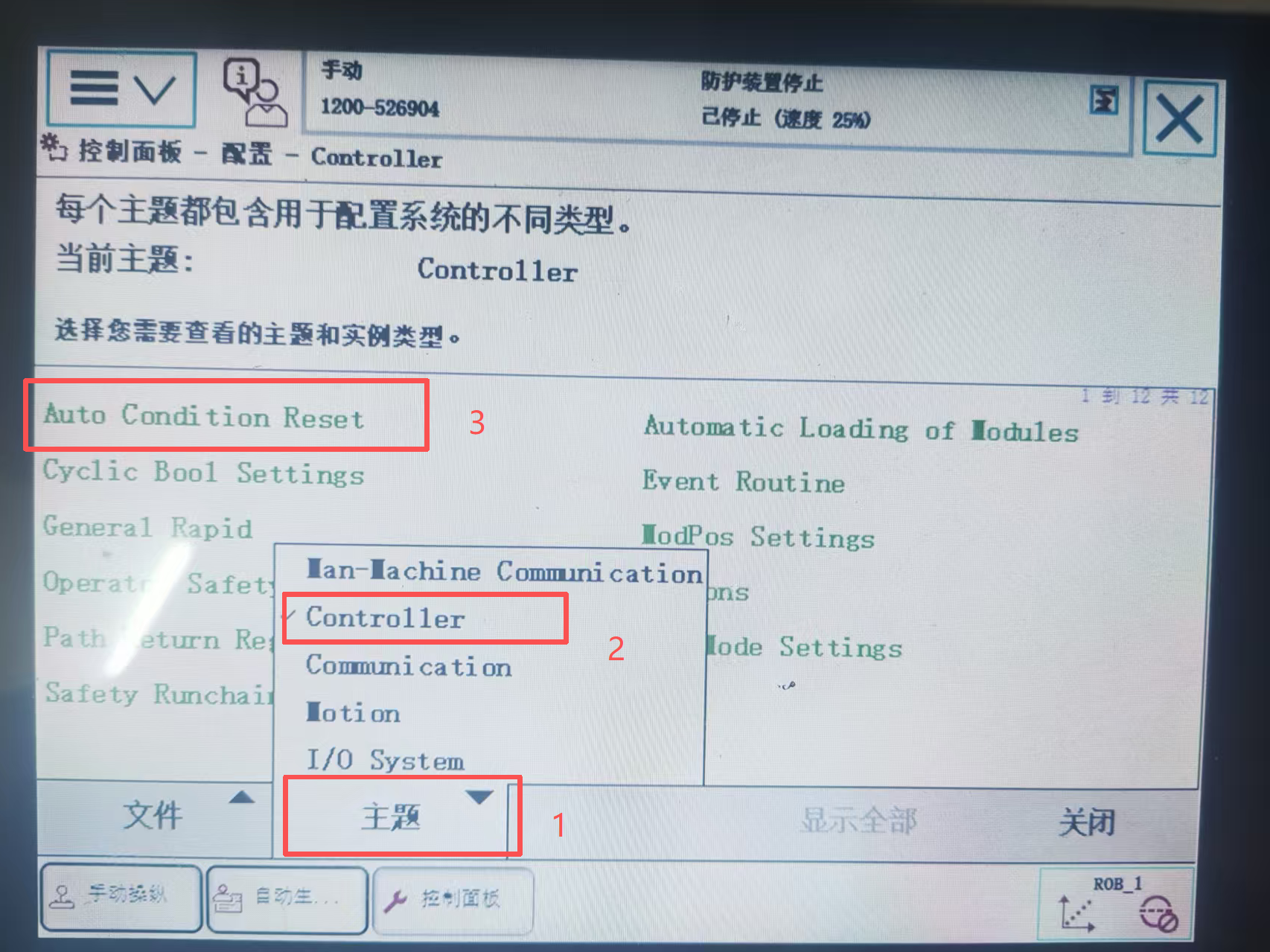
三、基础运行设置
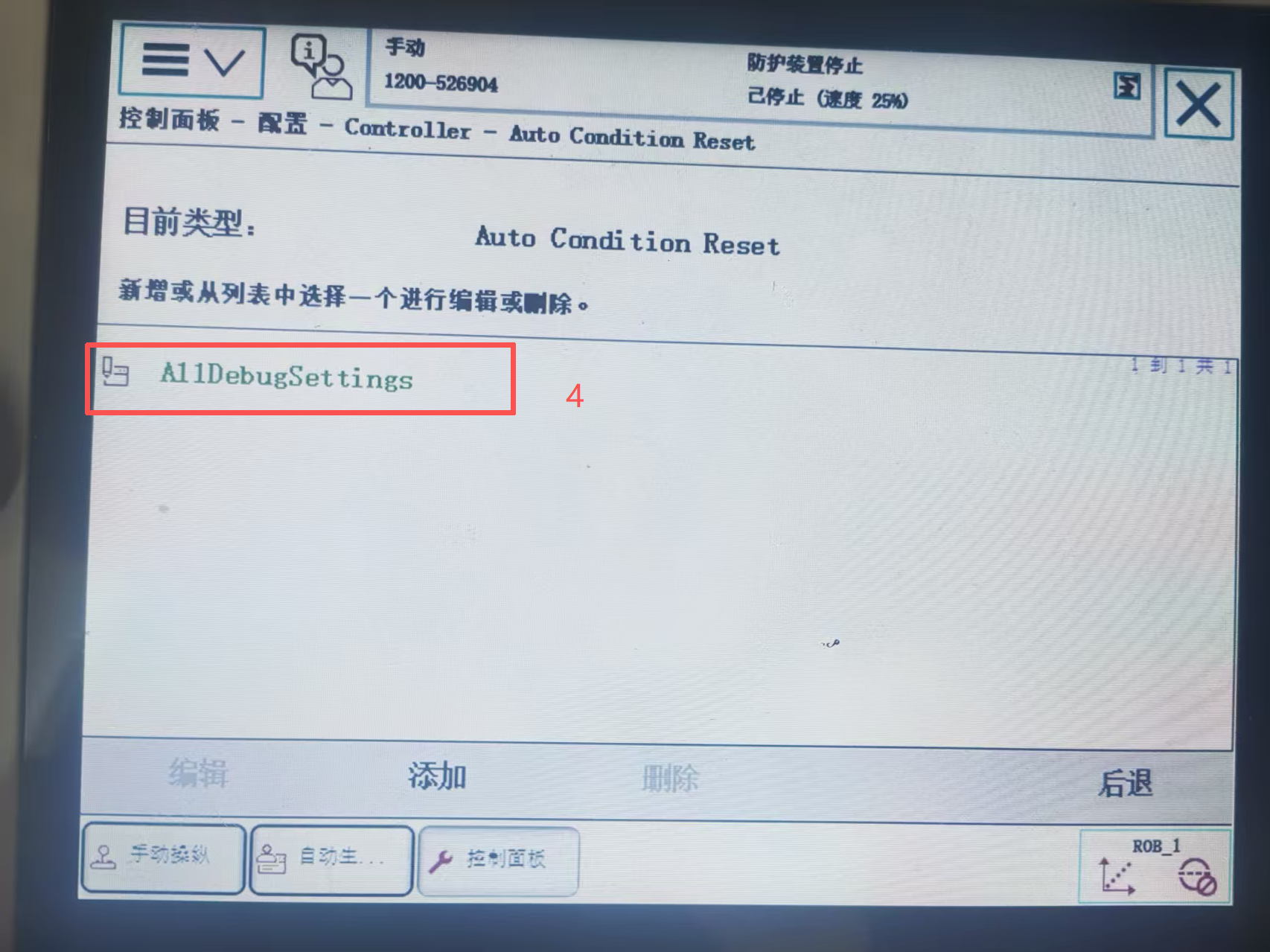
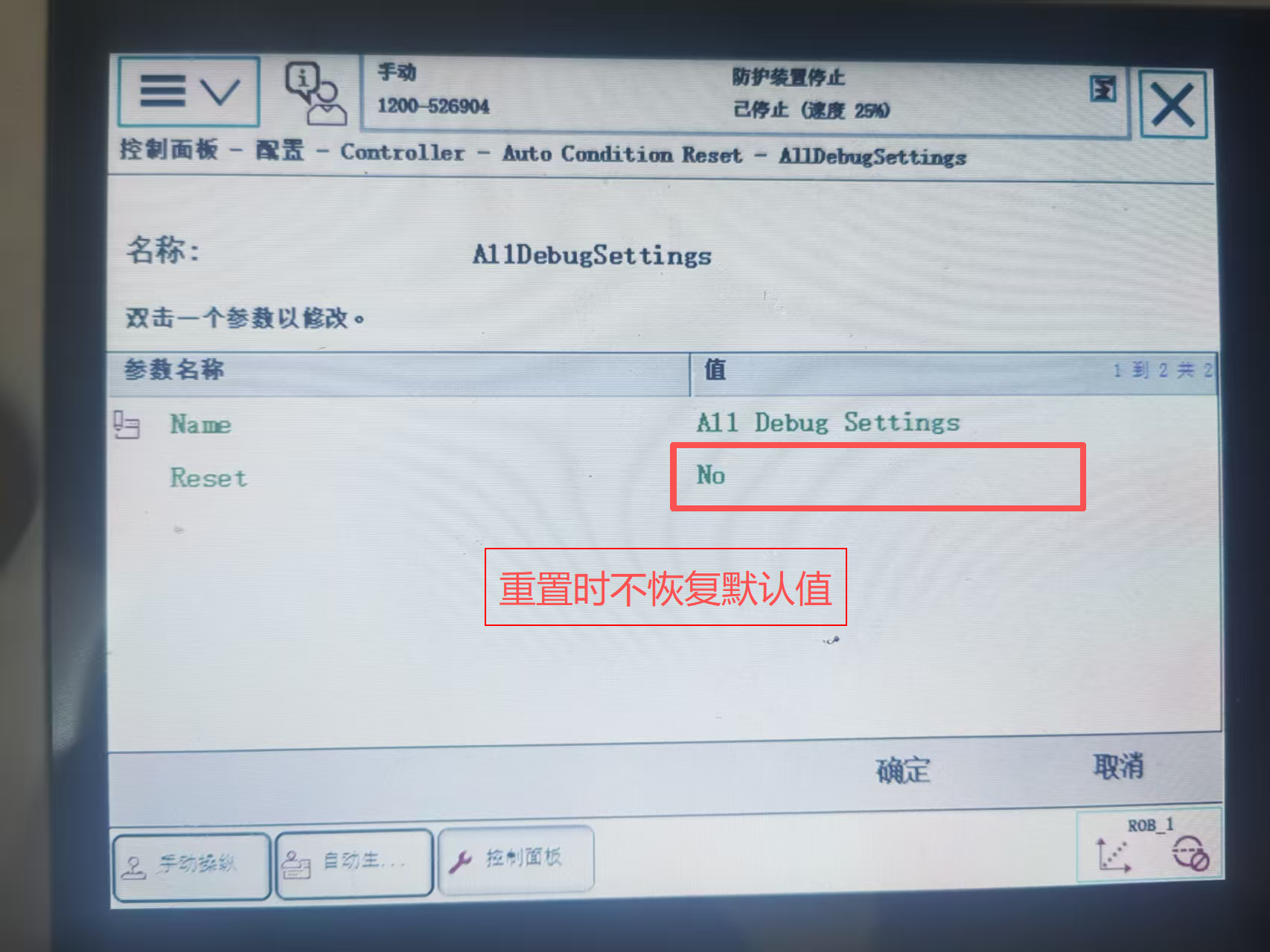
1、设置机器人自动参数不重置
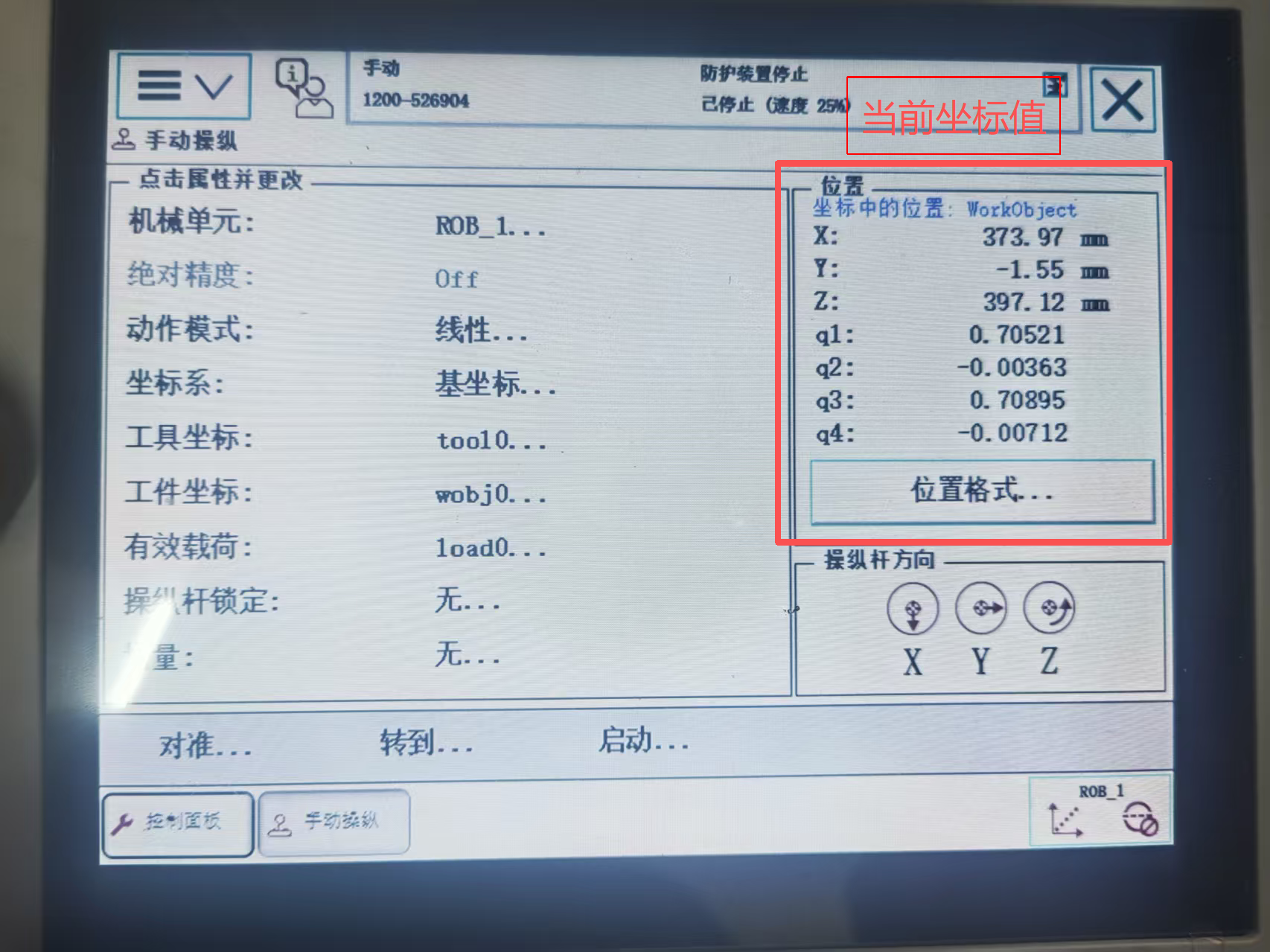
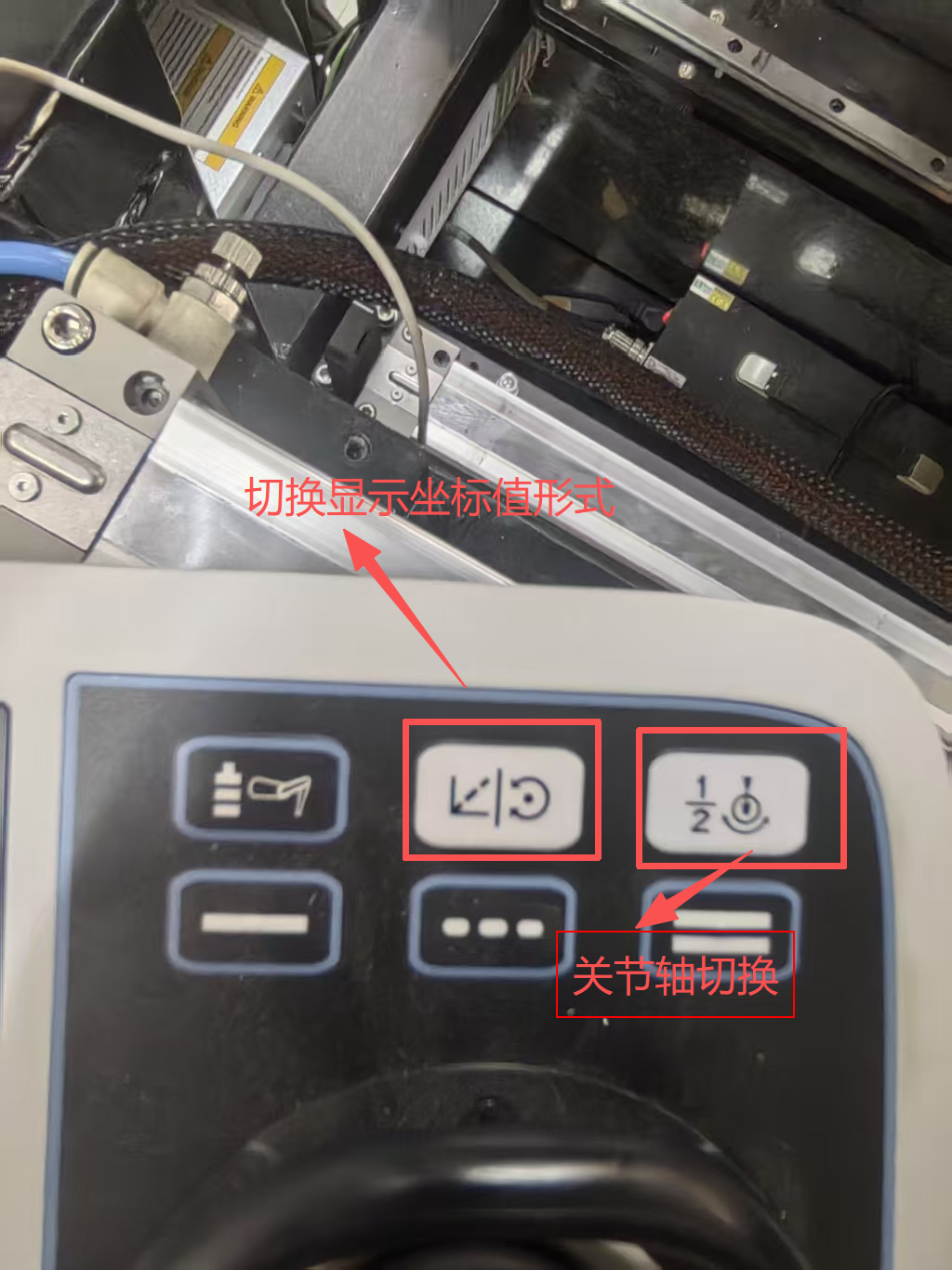
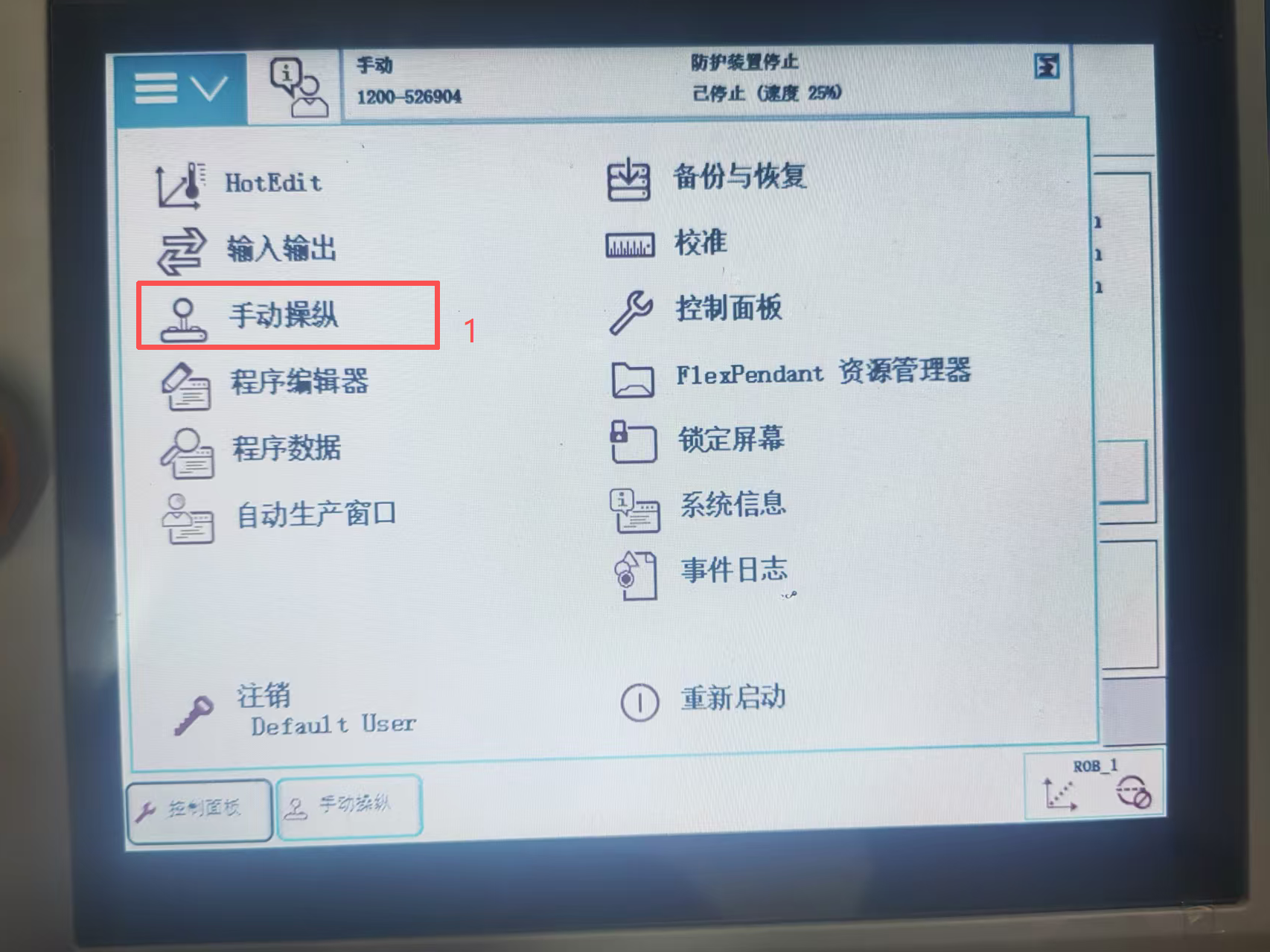
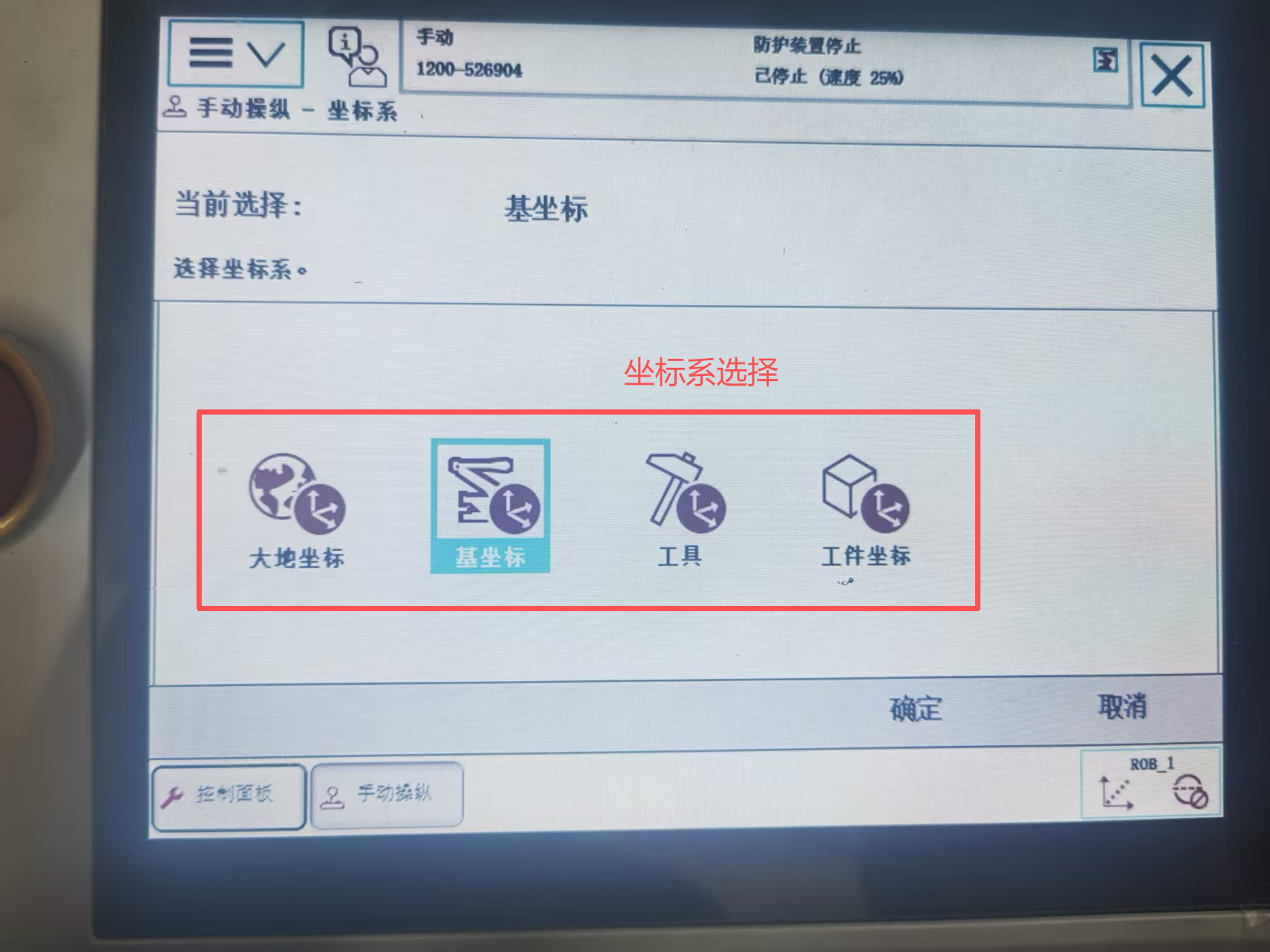
2、调整坐标系
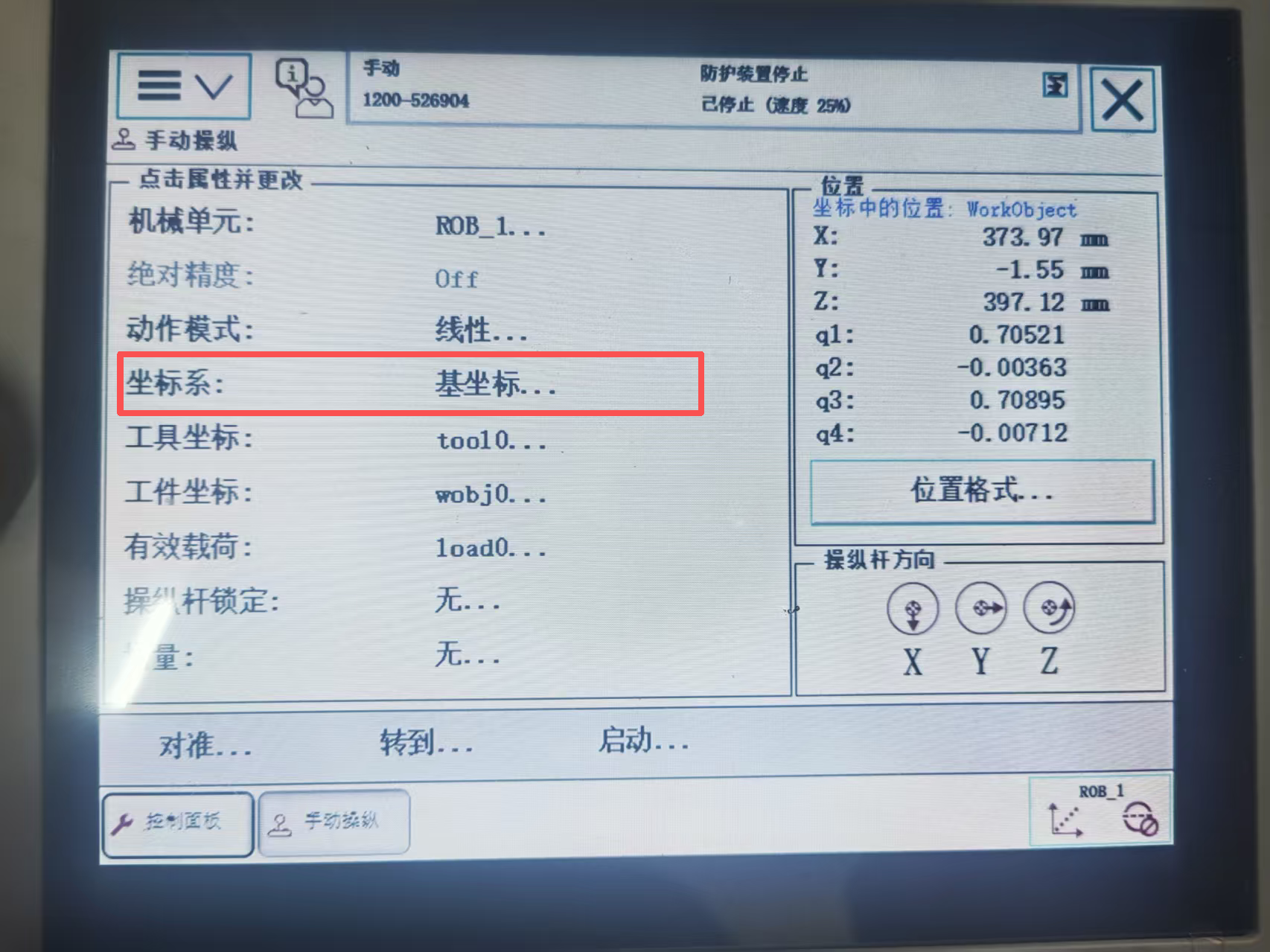
3、坐标值查看