引言
在https://blog.csdn.net/2201_75420345/article/details/159923705?fromshare=blogdetail&sharetype=blogdetail&sharerId=159923705&sharerefer=PC&sharesource=2201_75420345&sharefrom=from_link文章中,我们实现了基于 SIFT 算法的指纹基础验证功能,核心完成了特征提取、匹配筛选与结果判断。本文作为补充版 ,在原有基础上新增匹配关键点可视化标注 和特征匹配连线绘制核心功能,让指纹匹配结果从 "文字判定" 升级为 "直观图像展示",同时补充 SIFT 匹配中关键细节、可视化原理及问题排查技巧,让整个指纹匹配方案更完整、更具实用性,也能更清晰地理解特征匹配的底层逻辑。
本文代码基于原有指纹验证框架优化,无额外第三方依赖,保留核心逻辑的同时,仅新增可视化相关代码,易理解、可直接运行,适合快速上手计算机视觉特征匹配的可视化实现。
环境与依赖
- Python 3.x
- OpenCV(
cv2):核心用于图像处理、特征提取、匹配及可视化 - 测试图片:
scr2.bmp(待测指纹)、model.bmp(模板指纹),图片与代码置于同一目录 - 安装命令:
pip install opencv-python
任务描述
在原有指纹验证的基础上,完成匹配结果可视化升级,核心任务:
- 复用 SIFT 特征提取、FLANNK 近邻匹配、Lowe 比率测试核心逻辑;
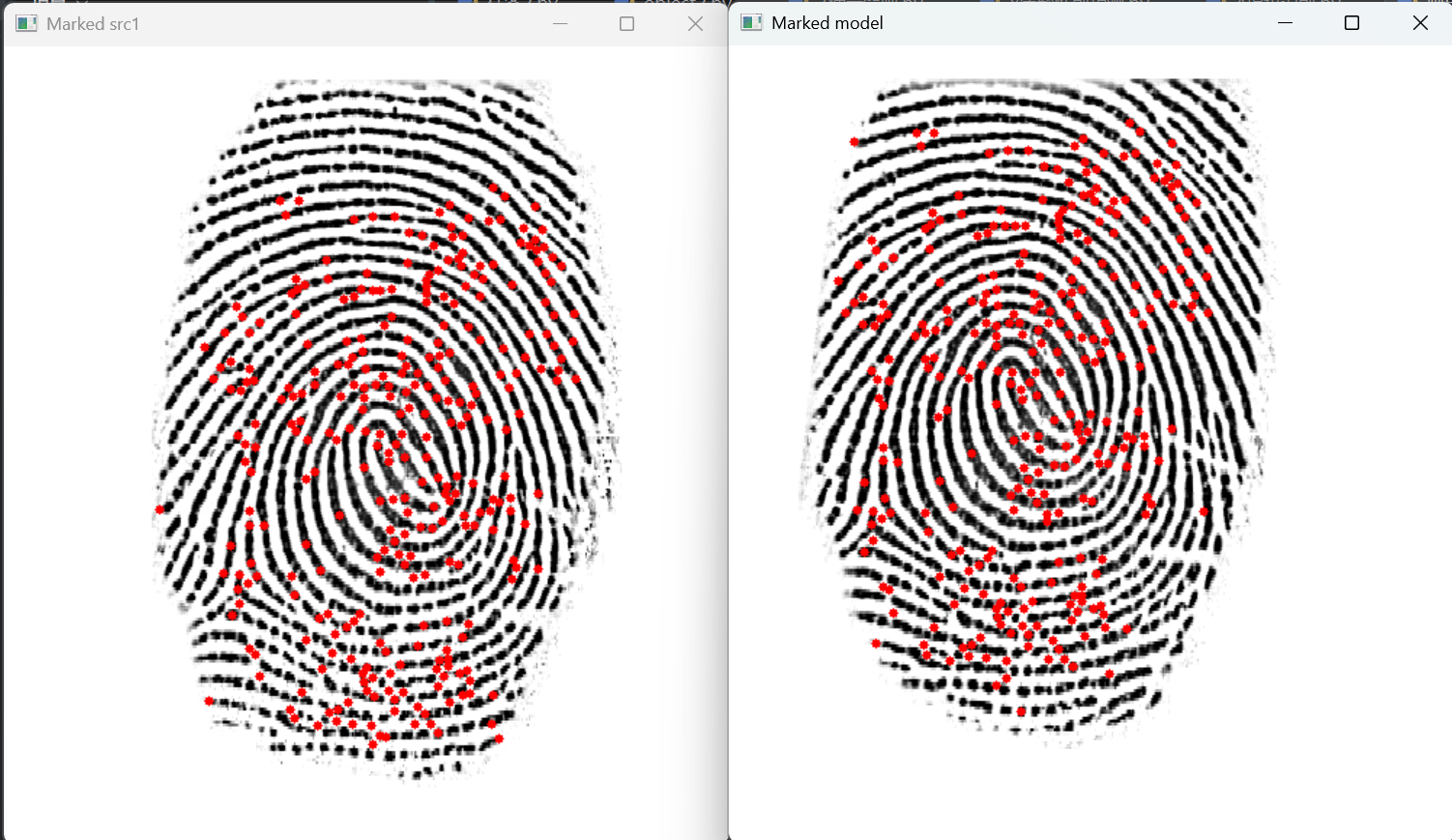
- 在待测指纹和模板指纹图像上,用红色实心点标注匹配成功的关键点;
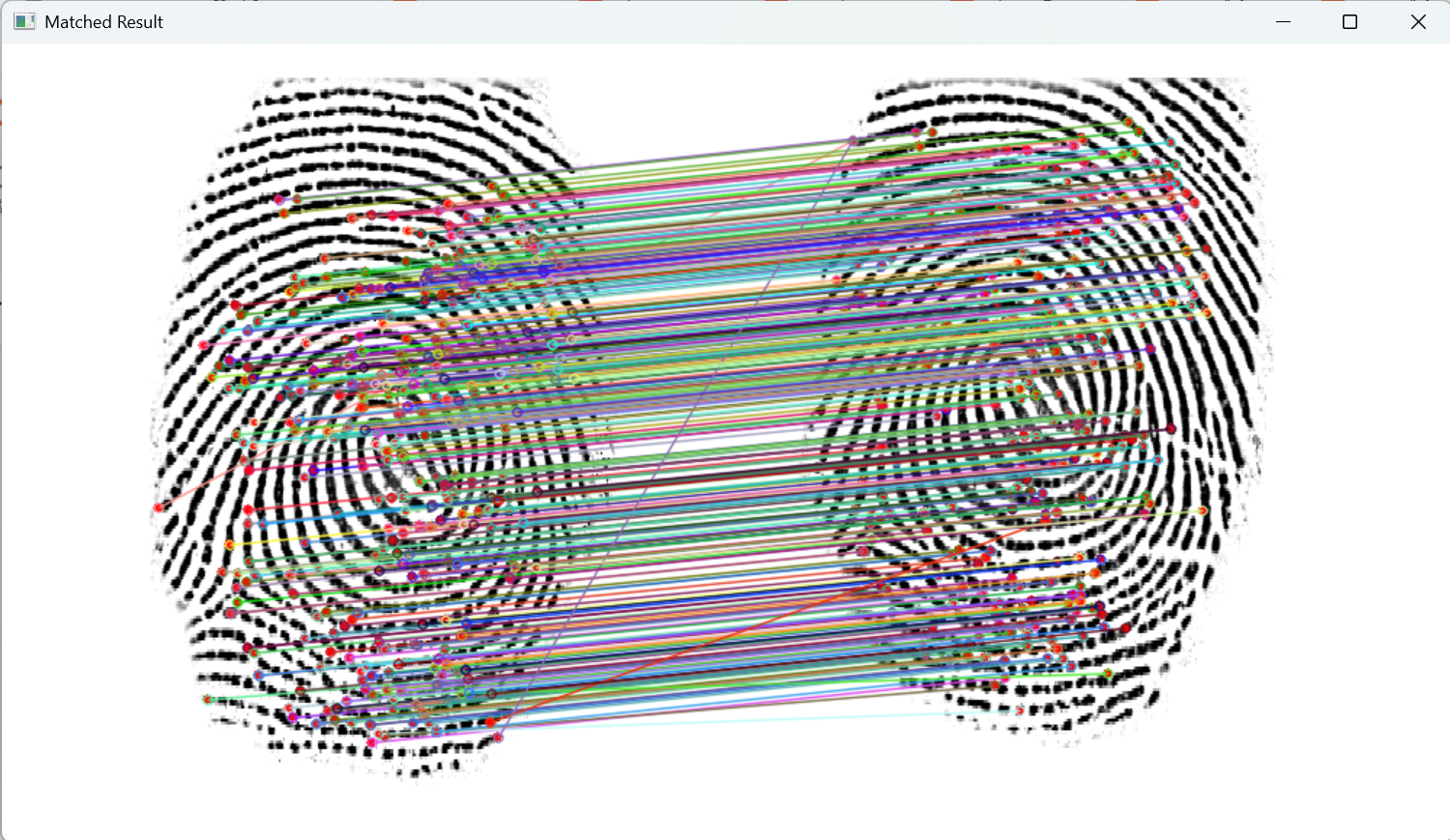
- 绘制跨图像的特征匹配连线图,直观展示特征点的匹配对应关系;
- 补充异常处理细节,提升代码鲁棒性,同时解析可视化核心函数的使用方法。
最终效果如下:
完整可运行代码
本文代码在原有基础上仅新增可视化相关代码,核心匹配逻辑完全复用,可直接复制运行:
import cv2
def cv_show(name, img):
"""
图像显示函数(新增空值校验,避免程序崩溃)
:param name: 窗口名称
:param img: 待显示图像对象
"""
if img is None or img.size == 0:
print(f"[{name}] 图像为空/读取失败,无法显示!")
return
cv2.imshow(name, img)
cv2.waitKey(0)
# 1. 读取指纹图像并做异常判断
src1 = cv2.imread("scr2.bmp")
model = cv2.imread("model.bmp")
if src1 is None or model is None:
print("错误:图片不存在/路径错误!请检查文件名和路径。")
exit()
# 2. SIFT特征提取(复用核心逻辑,灰度化预处理)
sift = cv2.SIFT_create()
gray_src = cv2.cvtColor(src1, cv2.COLOR_BGR2GRAY)
gray_model = cv2.cvtColor(model, cv2.COLOR_BGR2GRAY)
kp1, des1 = sift.detectAndCompute(gray_src, None)
kp2, des2 = sift.detectAndCompute(gray_model, None)
# 特征点检测异常判断
if des1 is None or des2 is None:
print("错误:未检测到特征点!请更换清晰的指纹图像。")
exit()
# 3. FLANN K近邻匹配(复用核心逻辑,k=2)
flann = cv2.FlannBasedMatcher()
matches = flann.knnMatch(des1, des2, k=2)
# 4. Lowe比率测试筛选优质匹配(复用核心逻辑,阈值0.6)
alist = [] # 新增:存储匹配点索引对,用于标注
good = [] # 新增:存储优质匹配,用于绘制连线
for m, n in matches:
if m.distance < 0.6 * n.distance:
alist.append((m.queryIdx, m.trainIdx))
good.append([m]) # 封装为列表,适配drawMatchesKnn输入格式
# 5. 新增:匹配关键点可视化标注(红色实心圆点)
for i, j in alist:
# 获取待测/模板指纹匹配关键点的坐标
x, y = kp1[i].pt
mx, my = kp2[j].pt
# 绘制红色实心圆(半径3,线宽-1表示填充)
cv2.circle(src1, (int(x), int(y)), 3, (0, 0, 255), -1)
cv2.circle(model, (int(mx), int(my)), 3, (0, 0, 255), -1)
# 显示标注后的图像
cv_show('Marked 待测指纹scr2', src1)
cv_show('Marked 模板指纹model', model)
# 6. 新增:特征匹配连线图绘制
matched_image = cv2.drawMatchesKnn(
src1, kp1, model, kp2,
good, None,
flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS
)
cv_show('SIFT指纹匹配结果连线图', matched_image)
# 释放窗口资源
cv2.destroyAllWindows()核心补充内容解析
一、新增可视化核心逻辑(极简解析)
本次补充的核心是2 个可视化步骤,代码量少且逻辑简单,完全基于原有匹配结果展开,无需修改核心提取 / 匹配逻辑:
1. 匹配关键点标注:cv2.circle
- 核心依据:筛选后的
alist存储了待测指纹关键点索引 和模板指纹关键点索引的一一对应关系; - 关键操作:通过
kp1[i].pt/kp2[j].pt获取特征点的像素坐标,用cv2.circle绘制红色实心点,直接标注在原图像上; - 实用参数:
radius=3(圆点大小适配指纹图像)、color=(0,0,255)(OpenCV 的 BGR 格式,红色)、thickness=-1(实心填充,标注更醒目)。
2. 跨图像匹配连线:cv2.drawMatchesKnn
这是 OpenCV 专为K 近邻匹配设计的可视化函数,直接实现 "左右图像拼接 + 匹配点连线",核心参数解析:
cv2.drawMatchesKnn(
待检测图像, 待检测图像关键点, 模板图像, 模板图像关键点,
优质匹配对列表, 输出画布(None为自动创建),
标志位(不绘制未匹配的孤立点)
)- 关键要求:优质匹配对列表
good需为二维列表 (即[m]而非m),这是 K 近邻匹配可视化的固定格式; - 标志位优化:
cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS表示只绘制匹配成功的点,过滤未匹配的孤立特征点,让匹配结果更清晰。
二、原有核心逻辑的细节补充
在第一篇文章中,我们讲解了 SIFT 匹配的基础用法,本文补充3 个关键细节,帮助理解为什么这么写、如何调优:
1. 为什么 Lowe 比率测试阈值选择 0.6?
0.6 是计算机视觉行业通用的最优阈值,也是 SIFT 算法作者推荐的数值,核心原则:
- 阈值过小(如 0.4):过滤过严,会丢失部分有效匹配,导致指纹真实匹配但标注 / 连线极少;
- 阈值过大(如 0.8):过滤过松,会保留大量噪声 / 纹理相似的错误匹配,导致标注点杂乱、连线无规律;
- 调优技巧:模糊指纹可适当提高至 0.65~0.7,清晰指纹可降低至 0.55~0.6。
2. queryIdx和trainIdx的核心含义
这两个参数是匹配结果的索引关键,也是可视化的基础,无需记忆,只需理解:
m.queryIdx:待检测图像(query) 的特征点索引,对应本文的kp1(待测指纹 scr2 的关键点);m.trainIdx:模板图像(train) 的特征点索引,对应本文的kp2(模板指纹 model 的关键点);- 核心作用:通过这两个索引,建立两张图像特征点的一一对应关系,实现精准标注和连线。
3. 为什么 SIFT 必须先转灰度图?
SIFT 算法的特征点检测和描述符计算 ,都是基于图像像素的灰度值变化(如纹理的明暗、拐点、分叉),彩色图的 BGR 三个通道会带来冗余计算,且对特征提取无任何帮助:
- 转灰度图后:将 3 通道的彩色图转为 1 通道的灰度图,大幅减少计算量,提升特征提取效率;
- 精度保障:灰度图保留了图像的核心纹理信息,完全满足 SIFT 特征提取的要求,不会丢失指纹的关键特征。
三、可视化后的结果解读
运行代码后,会依次弹出 3 个图像窗口,按任意键关闭当前窗口即可查看下一个,正常匹配的指纹结果具备以下特征:
Marked 待测指纹scr2/Marked 模板指纹model:红色圆点分布均匀,主要集中在指纹的分叉点、断点、纹理拐点等核心区域,无大面积密集或零散单点;SIFT指纹匹配结果连线图:左右图像的匹配连线无交叉、无杂乱,大部分连线呈 "平行状",且连线数量充足,覆盖指纹的主要纹理区域;- 若匹配结果杂乱(连线交叉多、标注点零散),则大概率是错误匹配,可通过调低 Lowe 阈值、更换更清晰的指纹图像优化。
常见问题与进阶排查(补充版)
在第一篇文章的基础上,补充可视化相关问题 及通用调优技巧,解决实际运行中的高频问题:
| 常见问题 | 核心原因 | 解决方案 |
|---|---|---|
| 图像窗口一闪而过 | 缺少cv2.waitKey(0)或代码末尾未加cv2.destroyAllWindows() |
确保每个cv_show函数内有cv2.waitKey(0),代码末尾加窗口释放语句 |
| 无法绘制匹配连线,报格式错误 | good列表为一维列表(直接 append (m)) |
改为good.append([m]),适配 Knn 匹配的可视化格式 |
| 标注点极少 / 无标注点 | Lowe 阈值过严,或指纹图像模糊 / 纹理过淡 | 调高阈值至 0.65~0.7,更换清晰的指纹图像;可增加高斯去噪cv2.GaussianBlur(gray, (5,5), 0) |
| 标注点杂乱、连线交叉多 | Lowe 阈值过松,或图像存在大量噪声 | 调低阈值至 0.55~0.6,对指纹图像做二值化预处理,过滤背景噪声 |
| 提示 "未检测到特征点" | 图像全黑 / 全白 / 分辨率过低 | 更换有效指纹图像,确保图像分辨率不低于 200×200 像素 |
原有功能的快速扩展建议
基于 "基础验证 + 可视化" 的现有框架,可快速实现轻量级指纹识别系统,新增功能均为小幅度修改,无需重构核心代码:
- 新增匹配数统计 :通过
len(good)统计优质匹配数,复用第一篇的验证逻辑,实现 "可视化 + 文字判定" 双重结果; - 多待测指纹批量验证:新增循环读取多张待测指纹图像,依次完成匹配、可视化、结果判断,适合批量检测;
- 图像预处理增强:新增高斯去噪、二值化、形态学操作,进一步提升模糊指纹的特征提取精度;
- 匹配结果保存 :通过
cv2.imwrite("匹配连线图.png", matched_image)将可视化结果保存到本地,方便后续查看。
总结
本文作为 SIFT 指纹匹配的补充版 ,核心完成了匹配结果的可视化升级,让原本抽象的 "特征匹配" 变得直观可见,同时补充了原有核心逻辑的关键细节、可视化函数的使用方法及高频问题排查技巧。
整个方案的核心思路始终围绕SIFT 算法的尺度 / 旋转不变性展开,从基础的文字验证,到直观的图像标注与连线,所有代码均基于原有框架优化,无冗余逻辑,既保留了实用性,又降低了学习成本。
通过本文的补充,我们不仅掌握了指纹匹配的可视化实现,更能深入理解特征匹配中 "索引对应""结果筛选" 的底层逻辑,这些技巧同样适用于物体识别、图像拼接、目标检测等其他计算机视觉场景。
结合第一篇的基础验证和本文的可视化补充,一套完整的轻量级 SIFT 指纹匹配方案已全部实现,读者可在此基础上根据实际需求进一步扩展优化。