🚗自动驾驶 ADAS 器件选型:算力只是门票,系统才是生死线
🎯 如果你只盯着 TOPS、像素和"最新芯片",
那你大概率会在 DV / PV / 量产 阶段被现实狠狠干一拳。
这篇文章不讲厂商 PR,不做参数搬运工,
我们只聊一句话:
ADAS 的器件,是怎么一步步把系统"拖死"或"救活"的。
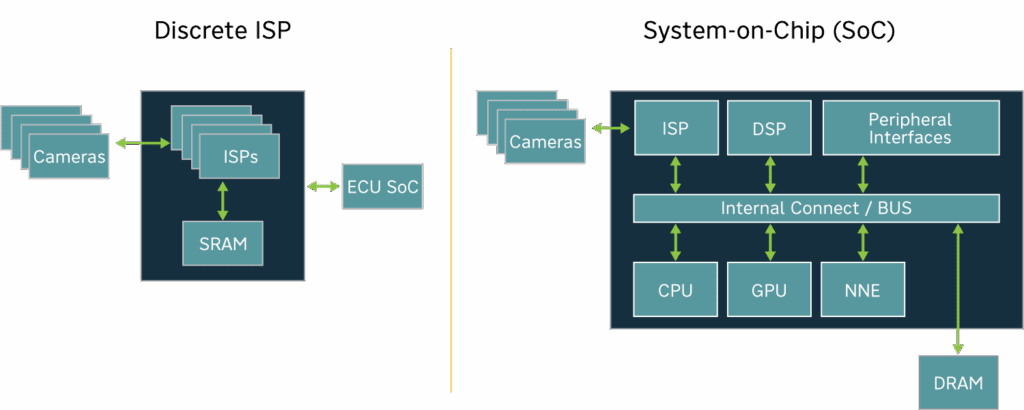
一、先看系统全貌:ADAS 从来不是一颗芯片的事 🧠
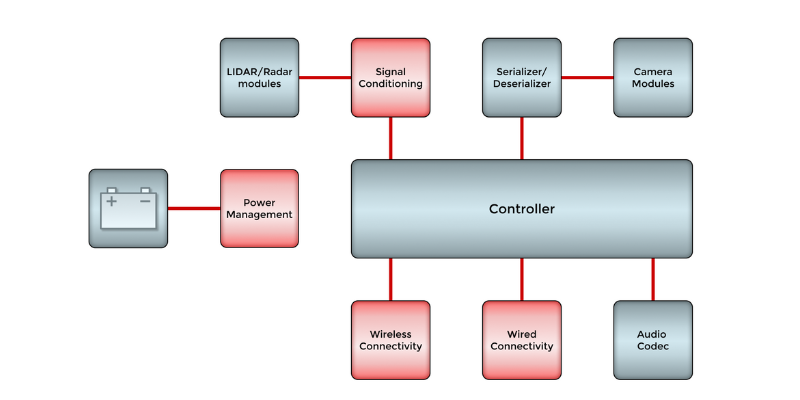
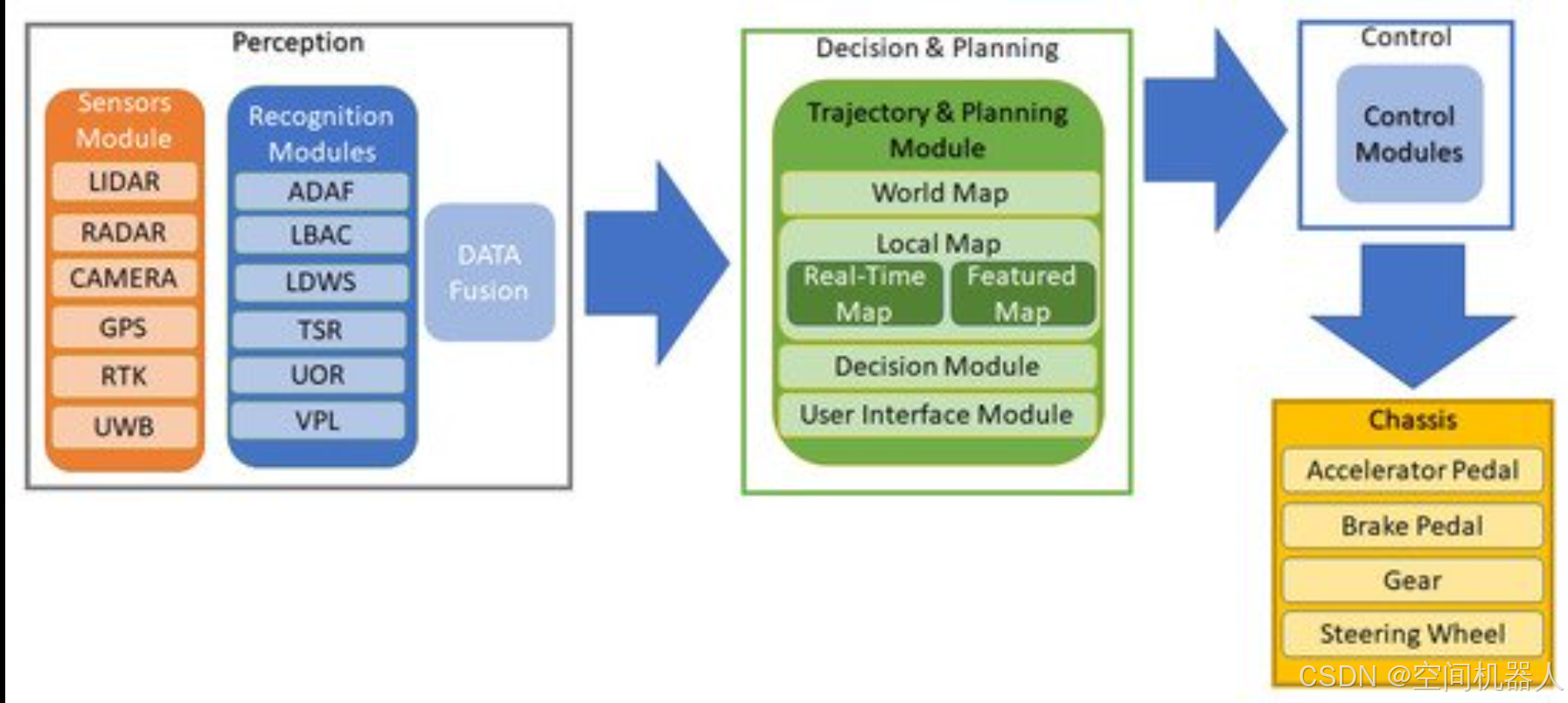
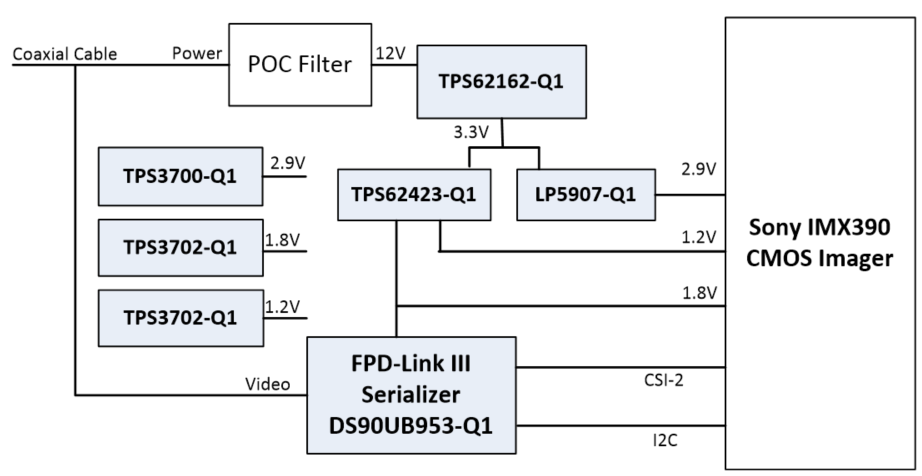
在一个完整的 ADAS 感知系统里,最基本的数据链路是:
Camera / Radar / Lidar → SerDes → SoC → DDR → AI / ISP → 决策
🎯 关键点:
- 数据是"流动的",不是"算完就没"
- 任一环节堵住,系统都会"假死"
👉 所以器件选型必须从数据流完整路径来推,而不是单点最优。
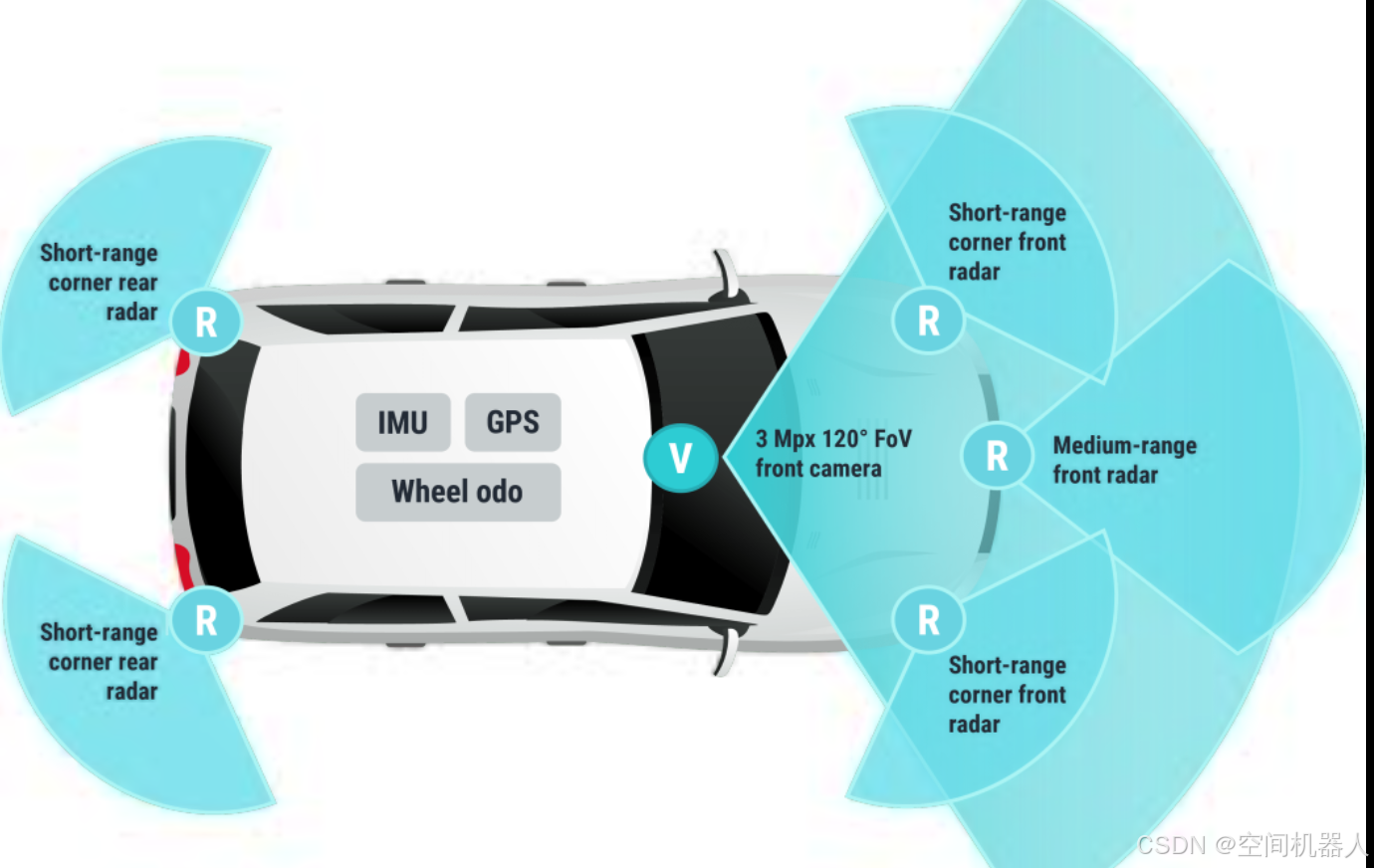
二、摄像头选型:像素堆上去,系统先跪下 🚗
1️⃣ 别急着喊 8MP / 12MP,先算数据率
以一个前视 ADAS 摄像头为例:
- 分辨率:3840 × 2160
- 帧率:30 fps
- RAW10
理论裸数据率:

但工程里你真正要面对的是:
- 行消隐 / 帧消隐
- CSI-2 包头 + ECC + CRC
- 虚拟通道 VC
- ISP 内部缓存抖动
👉 经验值:至少 ×1.25 ~ 1.3

2️⃣ 一个真实翻车案例


某项目配置:
- 前视:8MP ×2
- 侧视:5MP ×4
- 环视:3MP ×4
结果是:
- ISP 占满
- CSI Lane 长时间满负载
- AI 算法帧率掉到 70%
🔥 结论:
摄像头不是"看得越清楚越好",
而是 在系统预算内"刚刚好"最好。
三、SerDes 选型:高速是一把双刃剑 ⚡
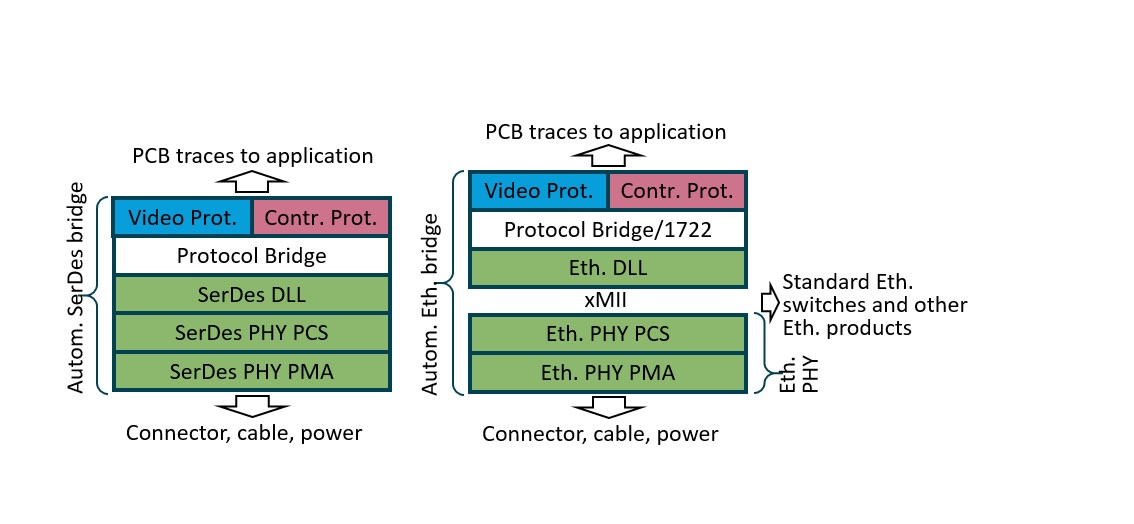


1️⃣ 为什么"最高速 SerDes"常常是坑?
理论上:
- 速率越高 → 带宽越富余
但现实是:
- EMI 随频率指数级上升
- 线束损耗更难补偿
- PCB SI 窗口极窄
🎯 特别是在 -40℃ ~ +105℃ 的车规环境下。
2️⃣ 工程上更稳的做法(真实项目经验)
- 前视 8MP:独占一条 SerDes
- 侧视 2~3 路 5MP:可复用,但留 ≥20% 余量
- 不要让 ISP 再去拆分 SerDes 汇流
🔥 一句话:
SerDes 的目标不是"跑极限",
而是 10 年内不返修、不漂移。
四、SoC 选型:TOPS 只是"入场券"🚀
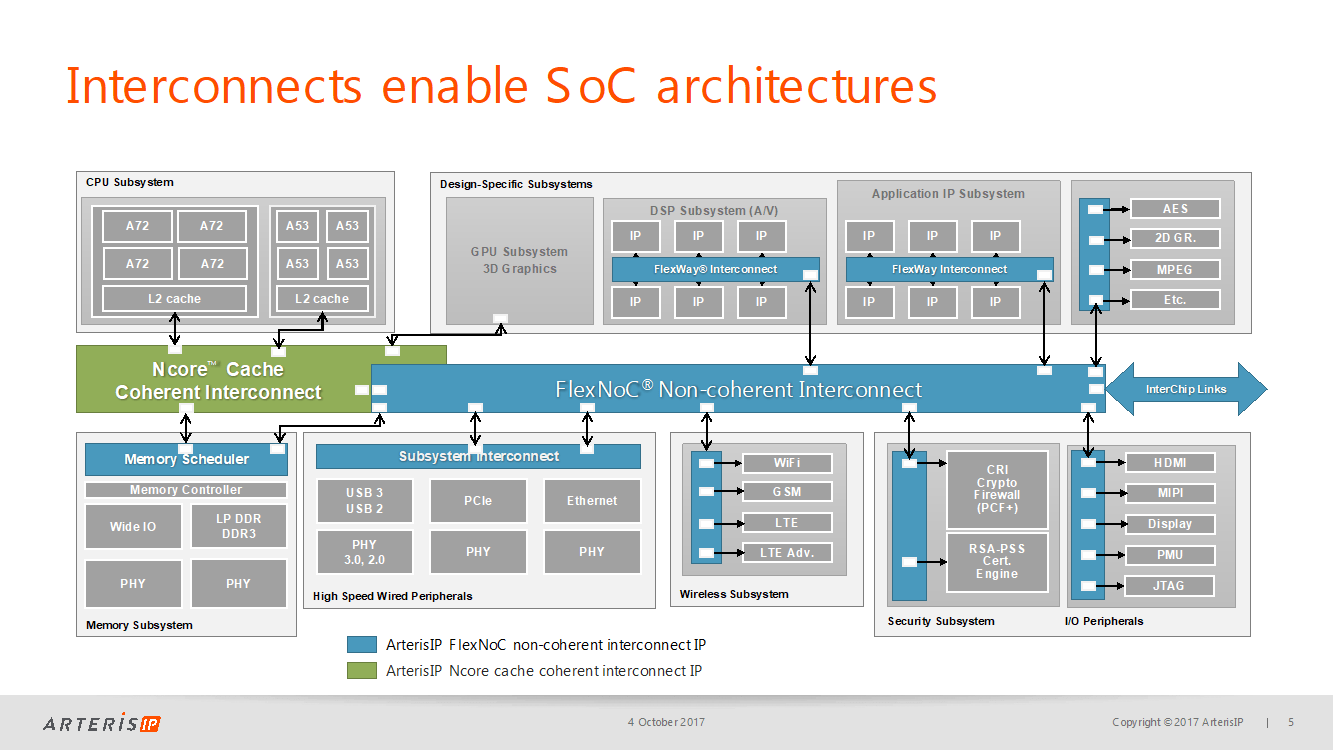
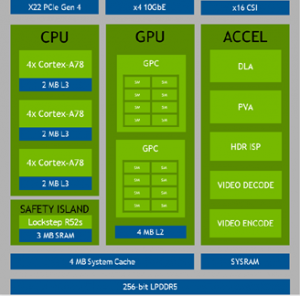
1️⃣ 真正要盯的不是算力,而是这三点
- ISP 吞吐能力
- CSI 接口是否真独立
- DDR 带宽分配策略
一个常见误区:
"AI 算力 200 TOPS,肯定够用"
但如果:
- ISP 吃掉 60% DDR
- 显示 + 编解码再吃 20%
👉 AI 实际可用带宽,可能不到 40%。
2️⃣ 一个算力"看着很强"的失败系统
- Demo:算法 30 fps ✔
- 上车:20 fps ❌
- 原因:DDR 仲裁 + 带宽冲突
🔥 结论:
SoC 强不强,看 满载还能不能稳跑 ,
不是看 PPT。
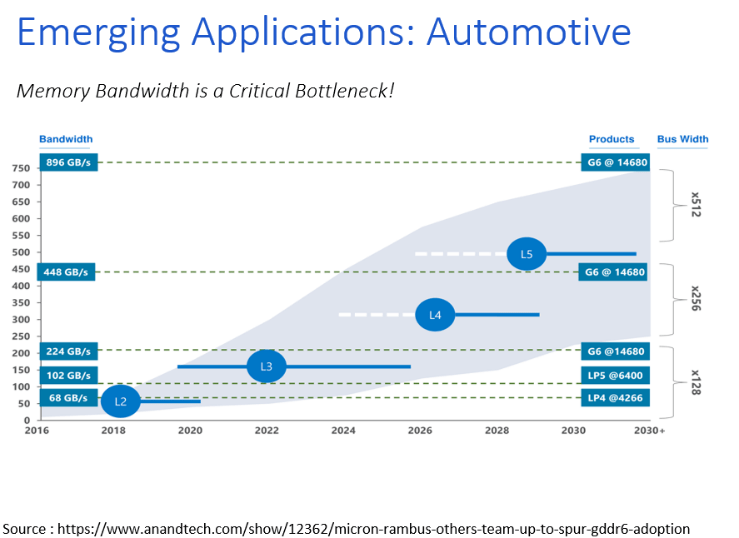
五、DDR & 存储:最容易被低估的系统瓶颈 💣
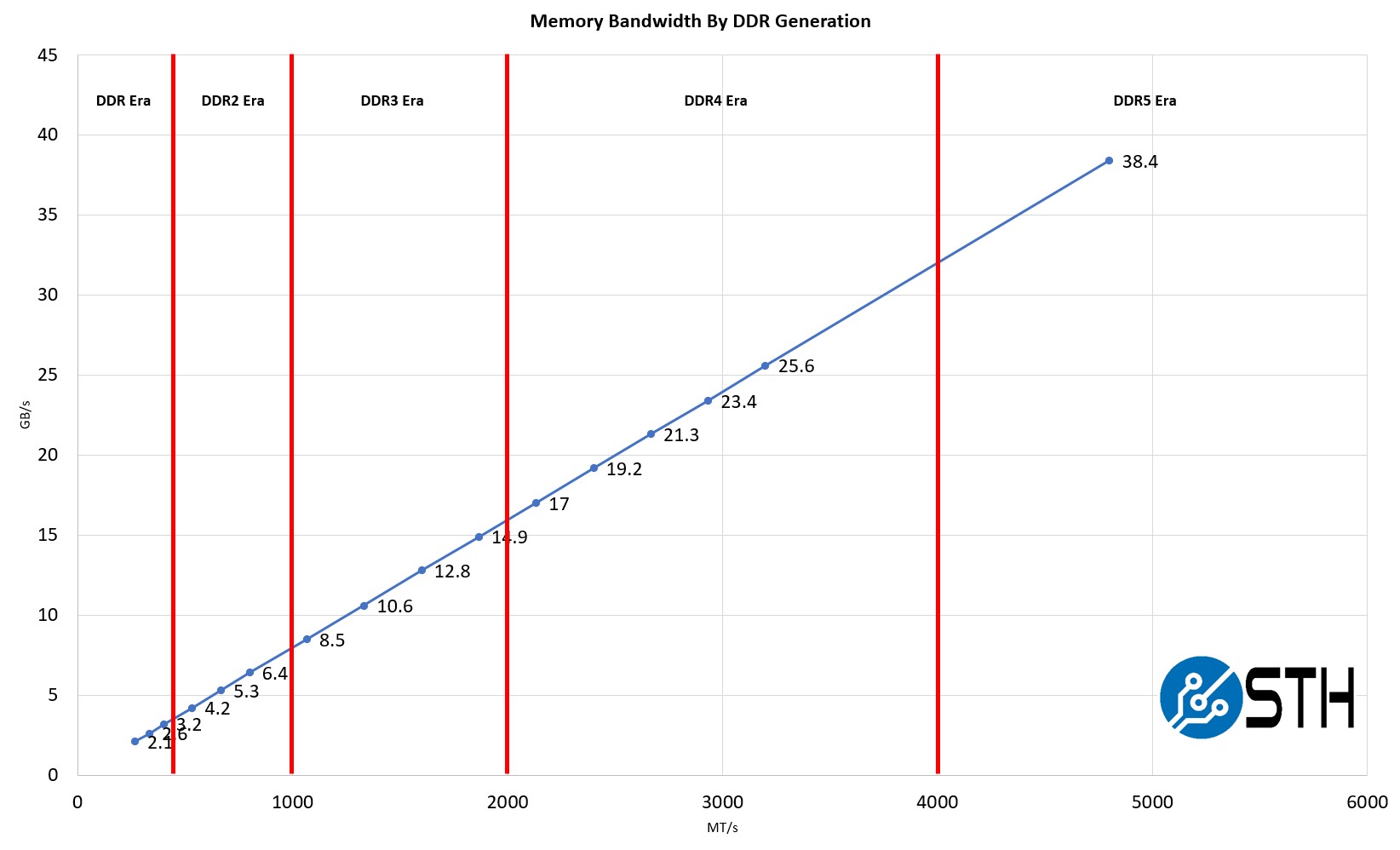
1️⃣ DDR 带宽的真实算法
假设系统有:
-
摄像头输入

-
ISP 写入 / 读取
-
AI Feature Map
-
显示输出
理论带宽需求:

🎯 现实规则:
DDR 标称带宽 × 0.6 ≈ 可用带宽
2️⃣ 存储选型的真实取舍
- eMMC:够用,但日志 + OTA 慢
- UFS:主流 ADAS 首选
- NVMe:高阶感知 + 黑匣子录像
🔥 一句话总结:
存储慢 → 系统卡
存储不稳 → 系统死
六、电源 & PMIC:真正决定"能不能量产"的东西 ⚠️
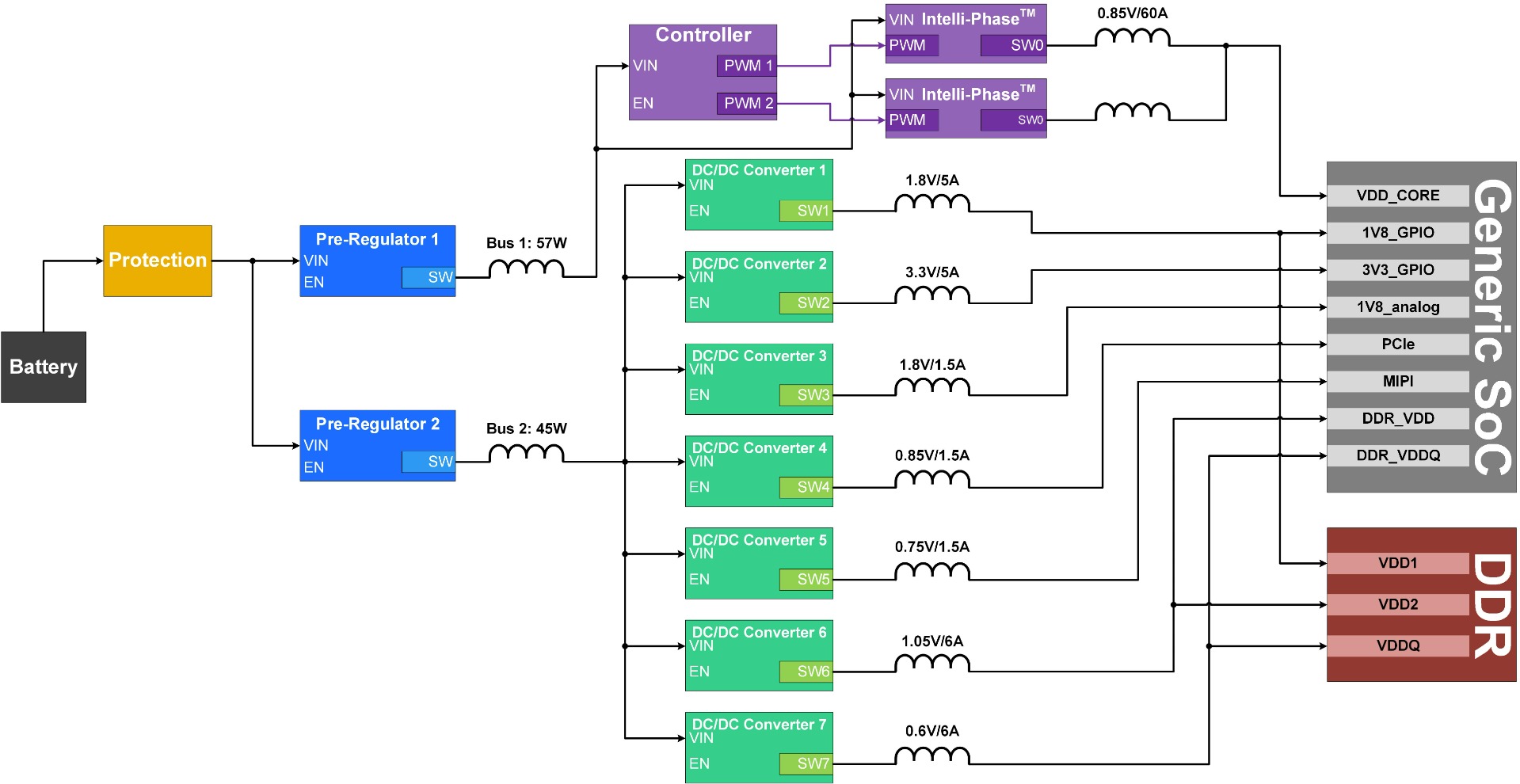
1️⃣ 99% 的问题,发生在这里
- 冷启动压降
- 高温电源 derating
- 负载突变导致复位
🎯 关键经验:
- SoC 核心电源 一定要留 20~30% 裕量
- DDR / SerDes 电源 噪声优先级 > 精度
- 电源和热设计必须一起看
七、终极总结:成熟 ADAS 选型的 3 条铁律 🔥
1️⃣ 先算数据流,再选器件
2️⃣ 优先稳定量产,不追极限参数
3️⃣ 最弱环节,决定系统上限
🎯 真正好的 ADAS 方案:
不是 Demo 最炫,
而是 冬天能启动、夏天不降频、5 年不返修。