参考:
2.WHEELTEC B570 平衡小车开发手册
1. 控制系统
为了使小车闭环稳定,最简单的想法是通过PID控制器控制小车倾角θ\thetaθ,使其为0。但实际应用时,会发现由于测量倾角θ\thetaθ和实际重心倾角有误差,即当测量的θ=0\theta=0θ=0时,小车重心实际存在倾斜,导致小车持续加速。故实际上多采用小车倾角和速度双环PID级联的方式:倾角环多采用PD控制器,因为角度控制需要保证响应速度且允许稳态误差;速度环多采用PI控制器,因为速度控制不能有稳态误差。另外需注意:速度环反馈为正反馈,倾角环反馈为负反馈。
双环并联PID控制器控制框图如下:
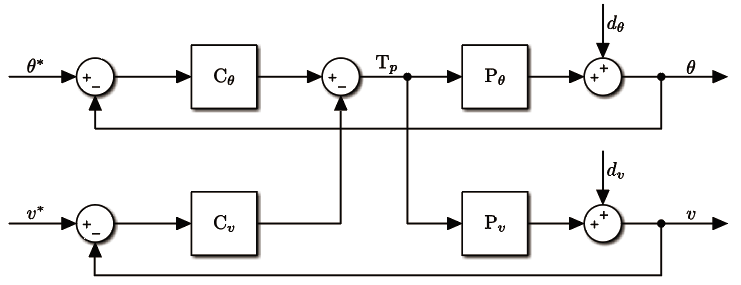
其中:
θ∗{\theta}^*θ∗为倾角目标值(恒为0),
θ{\theta}θ为倾角测量值,
dθd_\thetadθ为倾角扰动,
Cθ{\rm C}\thetaCθ为倾角PD控制器(Cθ=k1+kds{\rm C}\theta=k_1+k_dsCθ=k1+kds),
Pθ{\rm P}_\thetaPθ为PWM倾角模型,
v∗{v}^*v∗为速度目标值,
vvv为速度测量值,
dvd_vdv为速度扰动,
Cv{\rm C}_vCv为速度PI控制器(Cv=k2+kis−1{\rm C}_v = k_2+k_is^{-1}Cv=k2+kis−1),
Pv{\rm P}_vPv为PWM速度模型,
Tp{\rm T}_pTp为给电机的PWM信号。
2. 小车软硬件设计
小车实物图如下:
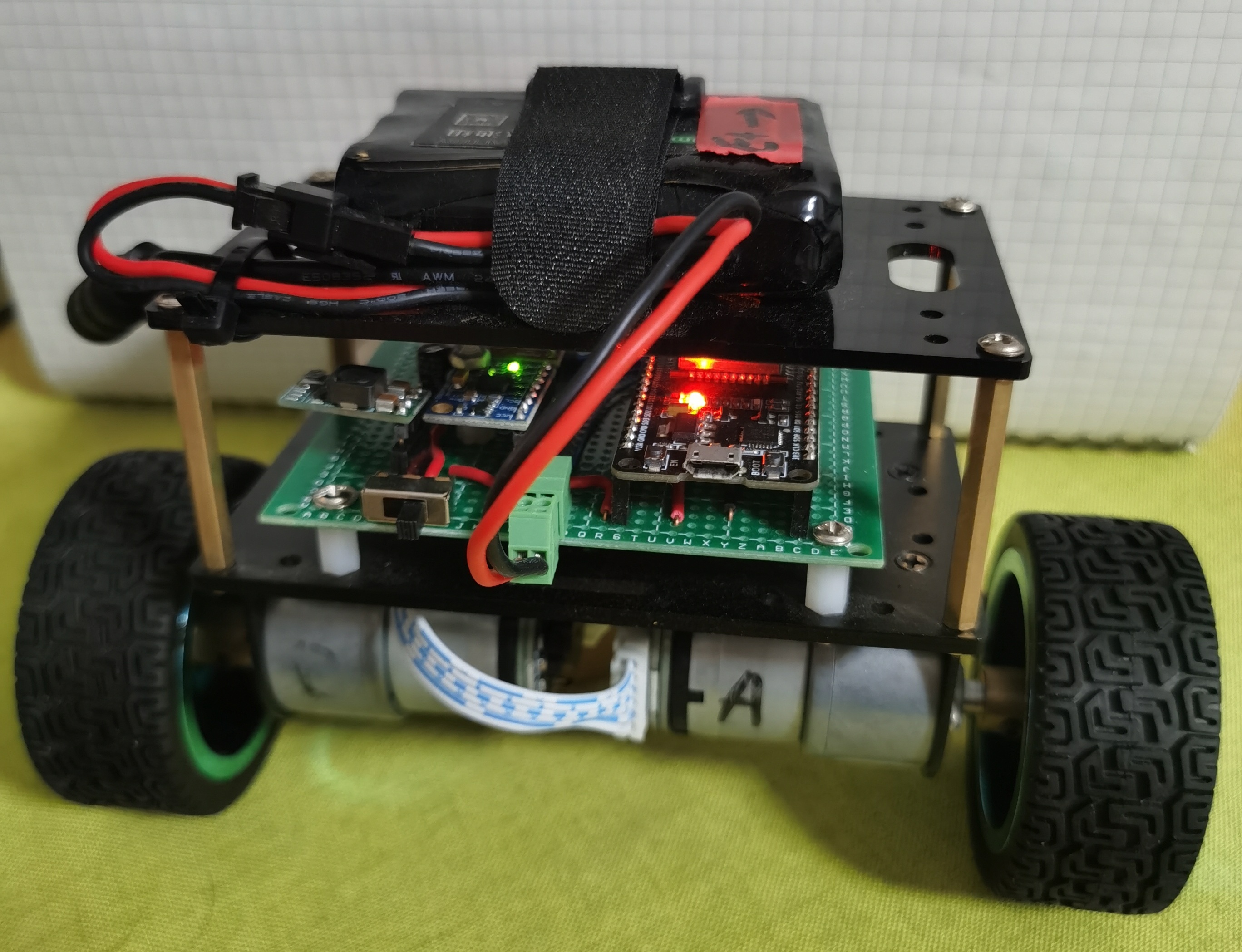
主控ESP32,姿态角测量MPU6050,电机驱动tb6612,电池为塔克R5配套12v锂电池。
电机控制周期10ms,PWM频率5kHz,精度8192分频,姿态角通过6050自带的IMU读取,读取周期5ms。
3. 模式识别
3.1 PWM->倾角模型
上一篇文章得到了小车模型传递函数为:
Pθ(s)=−Qr+Mlr{MJ+(2m+2Ir2)(J+Ml2)}s2−MlgP_\theta(s)=\frac{-\frac{Qr+Ml}{r}}{\{MJ+(2m+\frac{2I}{r^2})(J+Ml^2)\}s^2-Mlg}Pθ(s)={MJ+(2m+r22I)(J+Ml2)}s2−Mlg−rQr+Ml
其中:
Q=M+2m+2Ir2Q=M+2m+\frac{2I}{r^2}Q=M+2m+r22I
MMM为车体质量
lll为车体质心到车轮轴点的长度
mmm为车轮质量
rrr为车轮半径
III为车轮转动惯量
JJJ为车体转动惯量
TTT为电机输出扭矩和
θ\thetaθ为车体倾斜角度
为了简化分析,将小车模型改写为以下形式:
Pθ(s)=−ks2−a2P_\theta(s)=\frac{-k}{s^2-a^2}Pθ(s)=s2−a2−k,
其中k,ak,ak,a为正常数。
实验装置如下所示:
(略)
当给出恒定PWM信号,即Tp=2000{\rm T}_p=2000Tp=2000时,小车倾角如下图所示(采样周期10ms)。
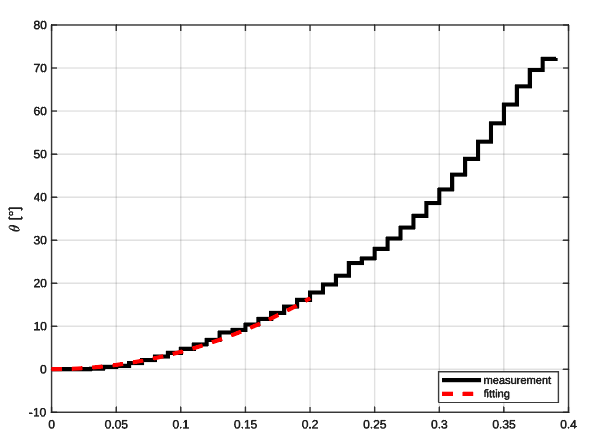
其中,黑线为角度测量值,红虚线为当k=0.4,a=3k=0.4,a=3k=0.4,a=3时PθP_\thetaPθ的模型仿真响应。
所以,小车PWM->倾角模型为:
Pθ=−0.4s2−9P_\theta=\frac{-0.4}{s^2-9}Pθ=s2−9−0.4。
3.2 PWM->速度模型
实验装置如下所示:
(略)
当给出恒定PWM信号,即Tp=2000T_p=2000Tp=2000时,电机平均转速如下图所示(采样周期10ms)。
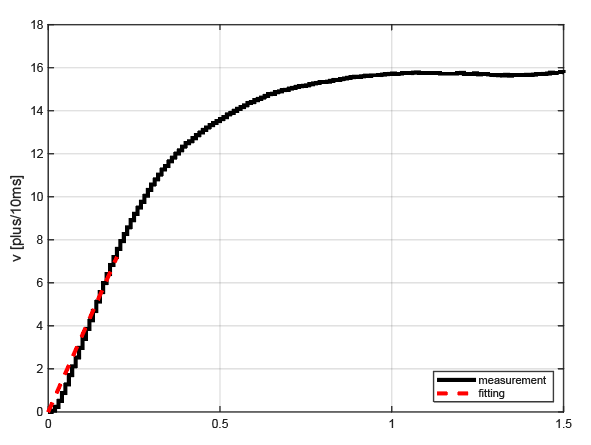
图中黑线为速度测量值,红虚线为令v=0.02Tpsv=\frac{0.02{\rm T}_p}{s}v=s0.02Tp,即Pv=0.02sP_v=\frac{0.02}{s}Pv=s0.02时的模型仿真输出。
可以看出,在最初一段时间(200ms)内,施加恒定PWM信号下,速度可视为匀加速变化,故可视PvP_vPv为一纯比例积分环节。
虽然车轮实际扭矩无法测量,但车轮扭矩与车轮线速度理论关系为v=rTIsv=\frac{r{\rm T}}{Is}v=IsrT,与识别出的PvP_vPv结构一致。所以,我们可以认为在电机初始阶段,也就是大负载或堵转情况下,PWM信号(TpT_pTp)和车轮扭矩为比例关系。由于自平衡小车电机几乎都工作在大负载工况下,所以在上一篇文章(双轮平衡车建模及控制1)中,我们认为小车模型的输入,即给电机的PWM信号,代表扭矩。
综上所述,小车PWM->速度模型为:
Pv=0.02sP_v=\frac{0.02}{s}Pv=s0.02。
4. 控制器调参
4.1 现有调参步骤
CθCv{\rm C}_\theta {\rm C}_vCθCv调参,首先参考《2.WHEELTEC B570 平衡小车开发手册》P46:
先调角度环:使k2k_2k2,kik_iki,kdk_dkd为0。从0逐渐增大k1k_1k1,直至小车出现低频抖动。保留此时的k1k_1k1,然后从0逐渐增大kdk_dkd,直至出现高频抖动,保留此时的kdk_dkd。将记录的k1k_1k1,kdk_dkd乘以 0.6 作为Cθ{\rm C}_\thetaCθ的最终参数。
再调速度环:保留上一步识别出的Cθ{\rm C}_\thetaCθ参数,从0逐渐增大k2k_2k2, kik_iki值设定为k2k_2k2的 1/200, 观察小车是否能立在原地。 若小车出现抖动, 而且用手推动小车会发生大幅回摆, 说明k2k_2k2 、kik_iki过高, 应适量减少。
4.2 对现有步骤的定性分析
针对角度环调参:
系统角度误差可视为冲击信号。当kd=0k_d=0kd=0,k1k_1k1逐渐增加时,系统灵敏度函数,即:
S=11+Ct∗Pt,dθ→θ.S=\frac{1}{1+C_t*P_t},d_\theta \rightarrow \theta.S=1+Ct∗Pt1,dθ→θ.
的冲击响应如下所示:
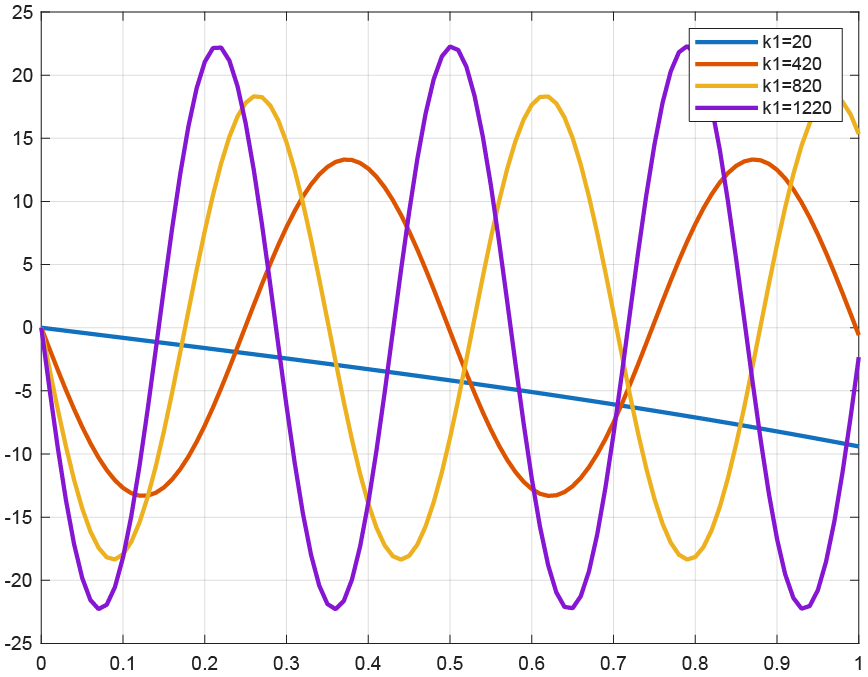
当k1k_1k1从0增加时,首先为了让系统稳定,根据稳定判据,需要闭环系统特征方程的解都在负半轴。针对本系统,当k1k>a2k_1k>a^2k1k>a2,即k1>22.5k_1>22.5k1>22.5时系统稳定。从上图可看出:k1=20k_1=20k1=20时系统冲击响应不稳定;k1>100k_1>100k1>100后,系统冲级响应的幅值和频率也随着k1k_1k1增大越来越大。但是,是不是k1k_1k1越大越好呢?这要看系统输入灵敏度函数,即:
U=Pt1+Ct∗Pt,dθ→Tp.U=\frac{P_t}{1+C_t*P_t}, d_\theta \rightarrow T_p.U=1+Ct∗PtPt,dθ→Tp.
当k1k_1k1逐渐增加时,UUU冲击响应如下所示:
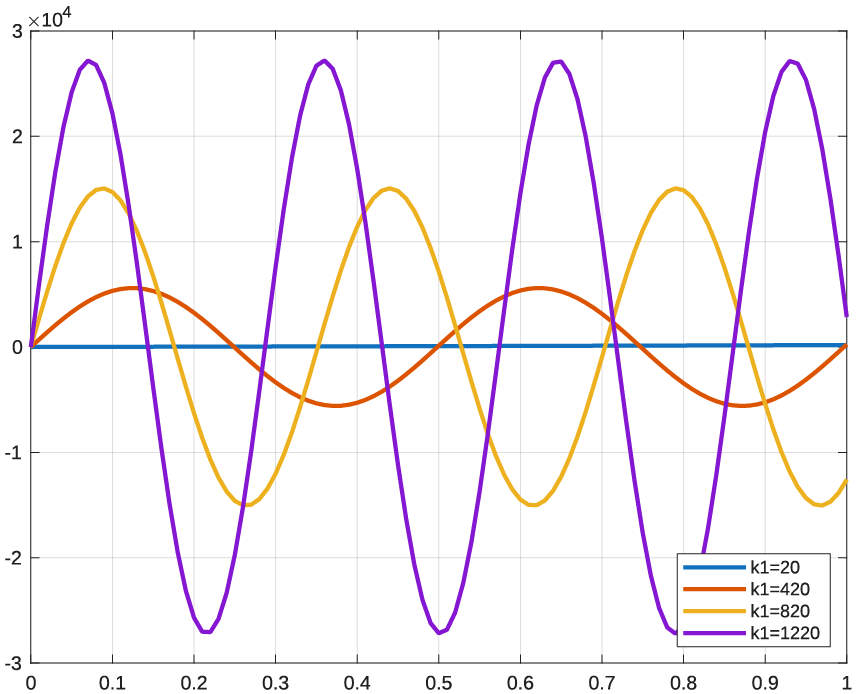
从上图可看出,当k1k_1k1较小时(例如为420)时,UUU冲击响应产生的PWM信号较小。 当使用配减速器的有刷电机时,较小的PWM信号产生的电机扭矩被减速器衰减过大,无法在车轮产生所需扭矩。 同理,当k1k_1k1过大(例如为1220)时,产生的PWM超过了100%输出的对应值(即8192),也不会产生仿真中的扭矩。保证PWM响应处于适宜区间内是控制器设计的重要考虑因素。
对于kdk_dkd,理论上能抑制超调,增加响应速度,但是kdk_dkd也不是越大越好。k1=820k_1=820k1=820时,不同kdk_dkd对应U的波特图如下所示:
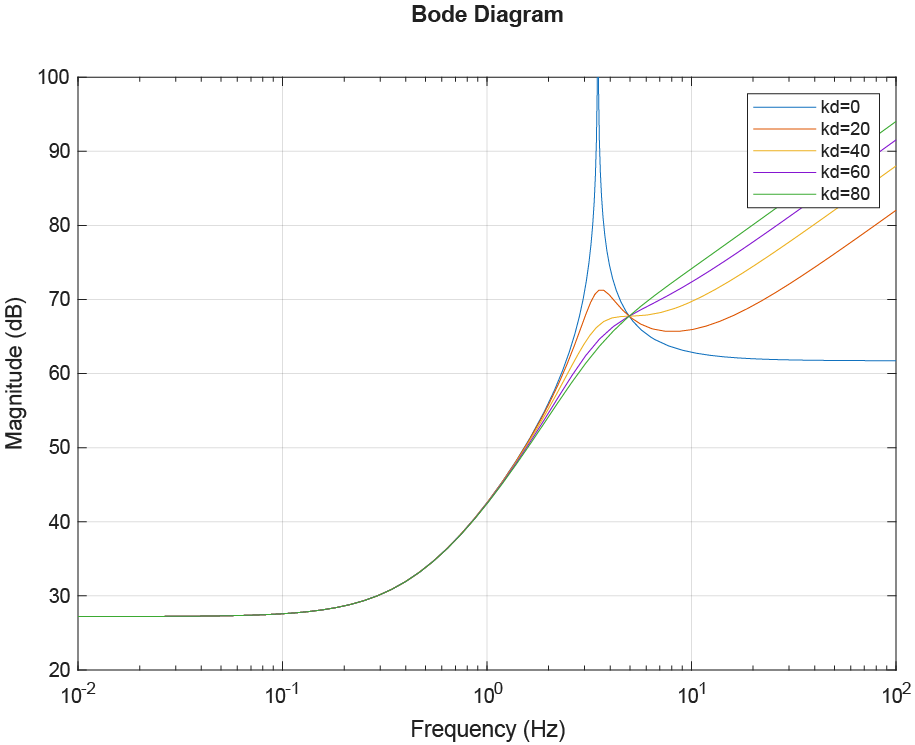
可以看到,当kdk_dkd增大时,对系统高频噪音的放大作用会加强。
针对速度环调参:
单独分析速度环没有意义,因为速度环是正反馈。当角度环控制器参数固定时,速度环参数对冲击响应的主要影响为:k2k_2k2增加时,系统振动幅值增大;kik_iki会略微影响稳态误差。这也合理,因为速度环作用主要是抑制角度测量误差中的恒定成分,此误差可视为阶跃信号。系统双环灵敏度函数为:
k2k_2k2对系统阶跃响应的影响如下图:
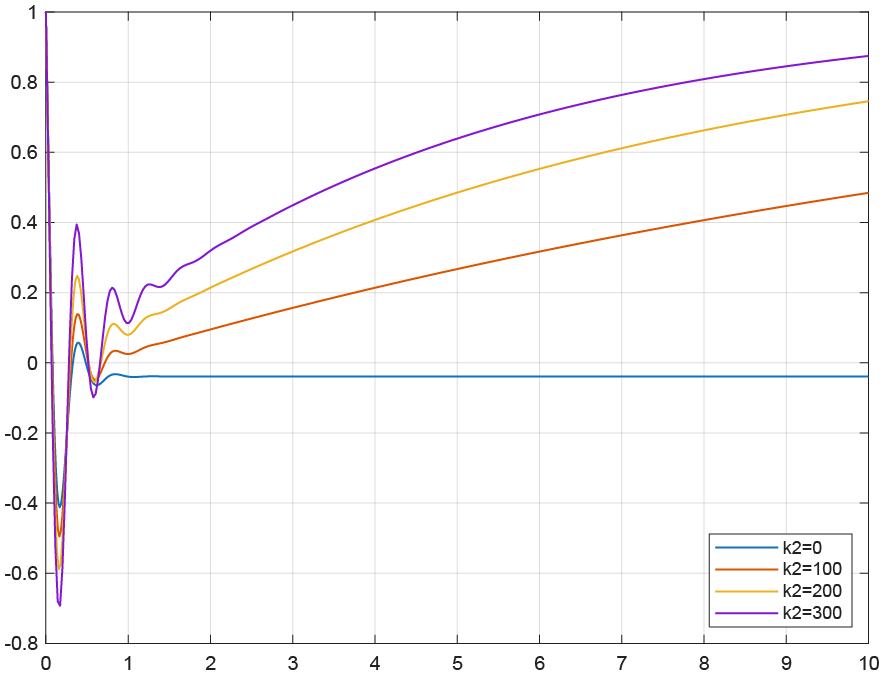
图中所示,增加k2k_2k2会增加系统震荡幅度,同时加快系统响应。增加kik_iki能减少稳态误差。
5. 控制效果
待后续