在雷达系统中,滤波是信号处理的核心环节。MTI雷达通过滤波器抑制地杂波,让运动目标从强杂波背景中凸显出来;脉冲多普勒雷达通过滤波器分离不同速度的目标,实现速度分辨。这些滤波器的名字各不相同------高通、低通、带通、数字滤波器、模拟滤波器------但它们的本质是微分、积分、差分、累加------这四种基本运算。理解了它们的频率特性,就理解了滤波器的本质。
一、微分器:高通滤波器的本质
微分运算是最基本的高通滤波机制。考虑一个连续时间信号x(t)x(t)x(t),对其求导得到输出信号y(t)=ddtx(t)y(t)=\frac{d}{dt}x(t)y(t)=dtdx(t)。这个简单的运算在频域中意味着什么?对等式两边做傅里叶变换,利用傅里叶变换的微分性质得到Y(jω)=jωX(jω)Y(j\omega)=j\omega X(j\omega)Y(jω)=jωX(jω),因此微分器的频率响应为:H(jω)=jω(1)H(j\omega)=j\omega(1)H(jω)=jω(1)这个表达式揭示了微分器的核心特性:幅频响应为∣H(jω)∣=ω|H(j\omega)|=\omega∣H(jω)∣=ω,这意味着增益随频率线性增长,频率越低增益越小,频率越高增益越大,当频率趋于零(直流)时增益趋于零,当频率趋于无穷时增益也趋于无穷;相频响应为∠H(jω)=+90∘\angle H(j\omega )=+{{90}^{\circ }}∠H(jω)=+90∘,这意味着微分器对所有频率成分都引入90度的相位超前。
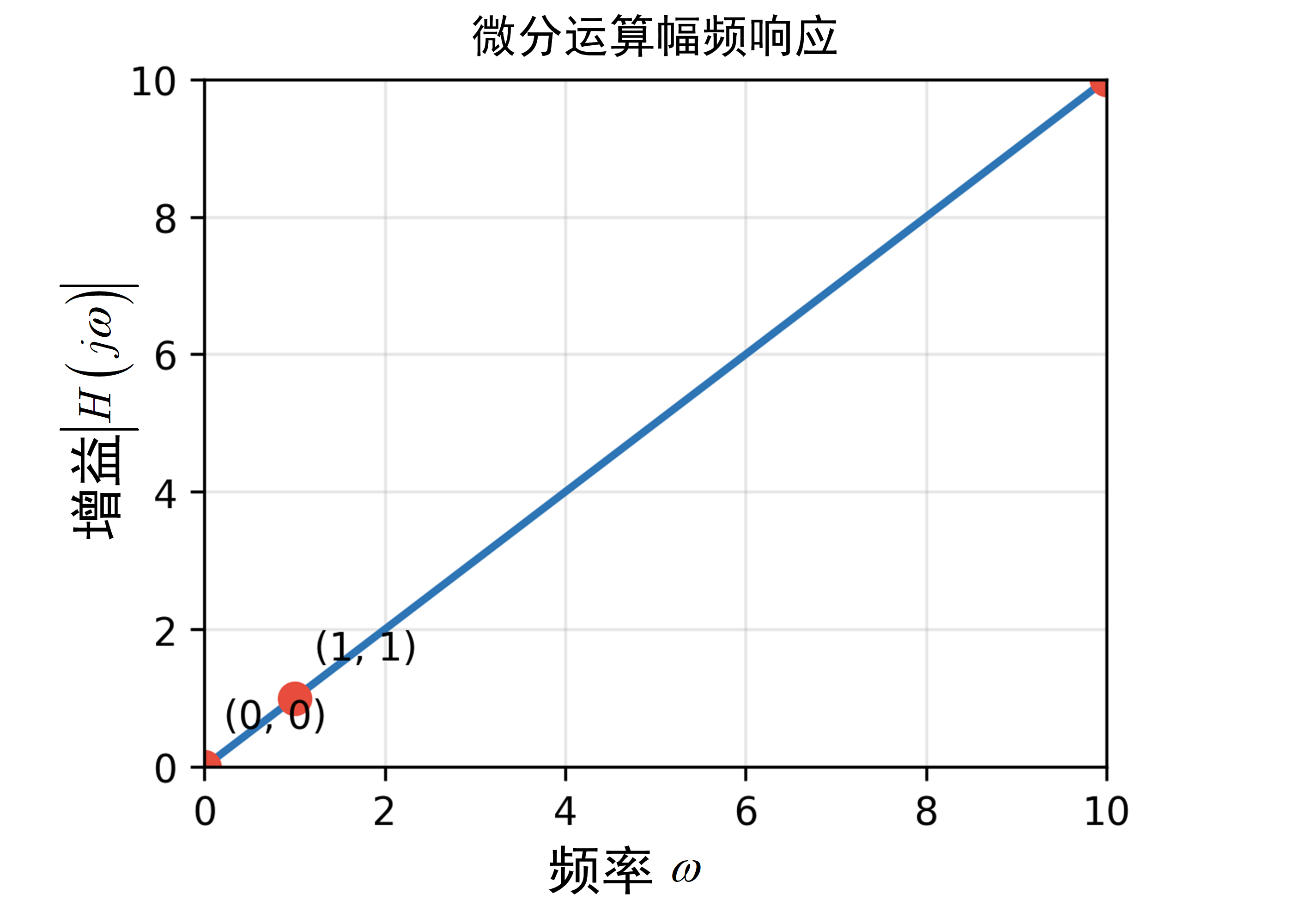
从物理意义上理解,微分运算检测的是信号的变化率,直流信号不随时间变化所以变化率为零因此被完全抑制,高频信号变化快变化率大因此被放大,这正是高通滤波器的本质特征。若输入信号为x(t)=Acos(ωt)x(t)=A\cos(\omega t)x(t)=Acos(ωt),经过微分器后得到y(t)=−Aωsin(ωt)y(t)=-A\omega\sin(\omega t)y(t)=−Aωsin(ωt),输出信号的幅度为AωA\omegaAω,与频率成正比。当ω=1rad/s\omega=1rad/sω=1rad/s时输出幅度等于输入幅度,当ω=0.1rad/s\omega=0.1rad/sω=0.1rad/s时输出幅度衰减为输入的1/10,当ω=10rad/s\omega=10rad/sω=10rad/s时输出幅度放大为输入的10倍。即:低频(ω→0\omega \to 0ω→0)时增益→0\to 0→0被抑制,高频(ω≥0\omega \ge 0ω≥0)时增益→∞\to \infty→∞被放大,直流(ω=0\omega=0ω=0)时增益=0=0=0完全滤除。因此,微分器是理想的一阶高通滤波器。
微分器在雷达中的一个典型应用是FM鉴频器。调频信号的表达式为:s(t)=Acosωct+kf∫−∞tm(τ)dτ(2)s(t)=A\cos\\omega_c t+k_f\\int_{-\\infty}\^{t}m(\\tau)d\\tau(2)s(t)=Acosωct+kf∫−∞tm(τ)dτ(2)其中m(t)m(t)m(t)是调制信号,kfk_fkf是调频灵敏度。瞬时相位为ϕ(t)=ωct+kf∫m(τ)dτ\phi(t)=\omega_c t+k_f\int m(\tau)d\tauϕ(t)=ωct+kf∫m(τ)dτ,瞬时频率为ωi(t)=dϕ(t)dt=ωc+kfm(t)\omega_i(t)=\frac{d\phi(t)}{dt}=\omega_c+k_f m(t)ωi(t)=dtdϕ(t)=ωc+kfm(t)。鉴频器的任务是从s(t)s(t)s(t)中还原出m(t)m(t)m(t),对s(t)s(t)s(t)直接求导得到:s′(t)=−Aωc+kfm(t)sinωct+kf∫m(τ)dτ(3)s'(t)=-A\\omega_c+k_f m(t)\sin\\omega_c t+k_f\\int m(\\tau)d\\tau(3)s′(t)=−Aωc+kfm(t)sinωct+kf∫m(τ)dτ(3)这是一个调幅-调相信号,其包络为Aωc+kfm(t)A\\omega_c+k_f m(t)Aωc+kfm(t),与调制信号m(t)m(t)m(t)成线性关系。通过包络检波器提取包络,再减去直流分量AωcA\omega_cAωc,即可还原出m(t)m(t)m(t)。这就是鉴频器的工作原理------微分运算将频率变化转换为幅度变化。
但微分器有一个重要缺陷:它会放大高频噪声。噪声通常具有丰富的高频成分,经过微分后会被显著放大。因此,实际鉴频器在微分之前通常会加低通滤波器进行限带,抑制高频噪声后再进行微分运算。这种"低通+微分"的组合称为平滑微分器,在工程中被广泛采用。理想的微分器在物理上无法实现,因为它需要对无穷高频都有响应。实际的RC高通滤波器是微分器的近似实现,一阶RC高通电路,输入电压为vin(t)v_{in}(t)vin(t),输出电压为vout(t)v_{out}(t)vout(t),根据基尔霍夫定律得到RCdvout(t)dt+vout(t)=RCdvin(t)dtRC\frac{dv_{out}(t)}{dt}+v_{out}(t)=RC\frac{dv_{in}(t)}{dt}RCdtdvout(t)+vout(t)=RCdtdvin(t)。当信号频率远低于截止频率(ω≪1/RC\omega\ll 1/RCω≪1/RC)时,vout(t)v_{out}(t)vout(t)项可以忽略,电路近似为微分器vout(t)≈RCdvin(t)dtv_{out}(t)\approx RC\frac{dv_{in}(t)}{dt}vout(t)≈RCdtdvin(t);当信号频率远高于截止频率(ω≫1/RC\omega\gg 1/RCω≫1/RC)时,微分项占主导,电路近似为直通vout(t)≈vin(t)v_{out}(t)\approx v_{in}(t)vout(t)≈vin(t)。因此,RC高通滤波器在低频段表现为微分器,在高频段表现为直通,整体呈现高通特性。
二、积分器:低通滤波器的本质
积分运算是微分运算的逆运算,也是最基本的低通滤波机制。考虑一个连续时间信号x(t)x(t)x(t),对其积分得到输出信号y(t)=∫0tx(τ)dτy(t)=\int_{0}^{t}x(\tau)d\tauy(t)=∫0tx(τ)dτ。对等式两边做傅里叶变换,利用傅里叶变换的积分性质得到Y(jω)=1jωX(jω)Y(j\omega)=\frac{1}{j\omega}X(j\omega)Y(jω)=jω1X(jω),因此积分器的频率响应为:H(jω)=1jωH(j\omega)=\frac{1}{j\omega}H(jω)=jω1。这个表达式揭示了积分器的核心特性:幅频响应为:∣H(jω)∣=1ω(4)|H(j\omega)|=\frac{1}{\omega}(4)∣H(jω)∣=ω1(4)这意味着增益随频率成反比衰减,频率越低增益越大,频率越高增益越小,当频率趋于零(直流)时增益趋于无穷,当频率趋于无穷时增益趋于零;相频响应为∠H(jω)=−90∘\angle H(j\omega )=-{{90}^{\circ }}∠H(jω)=−90∘,这意味着积分器对所有频率成分都引入90度的相位滞后。
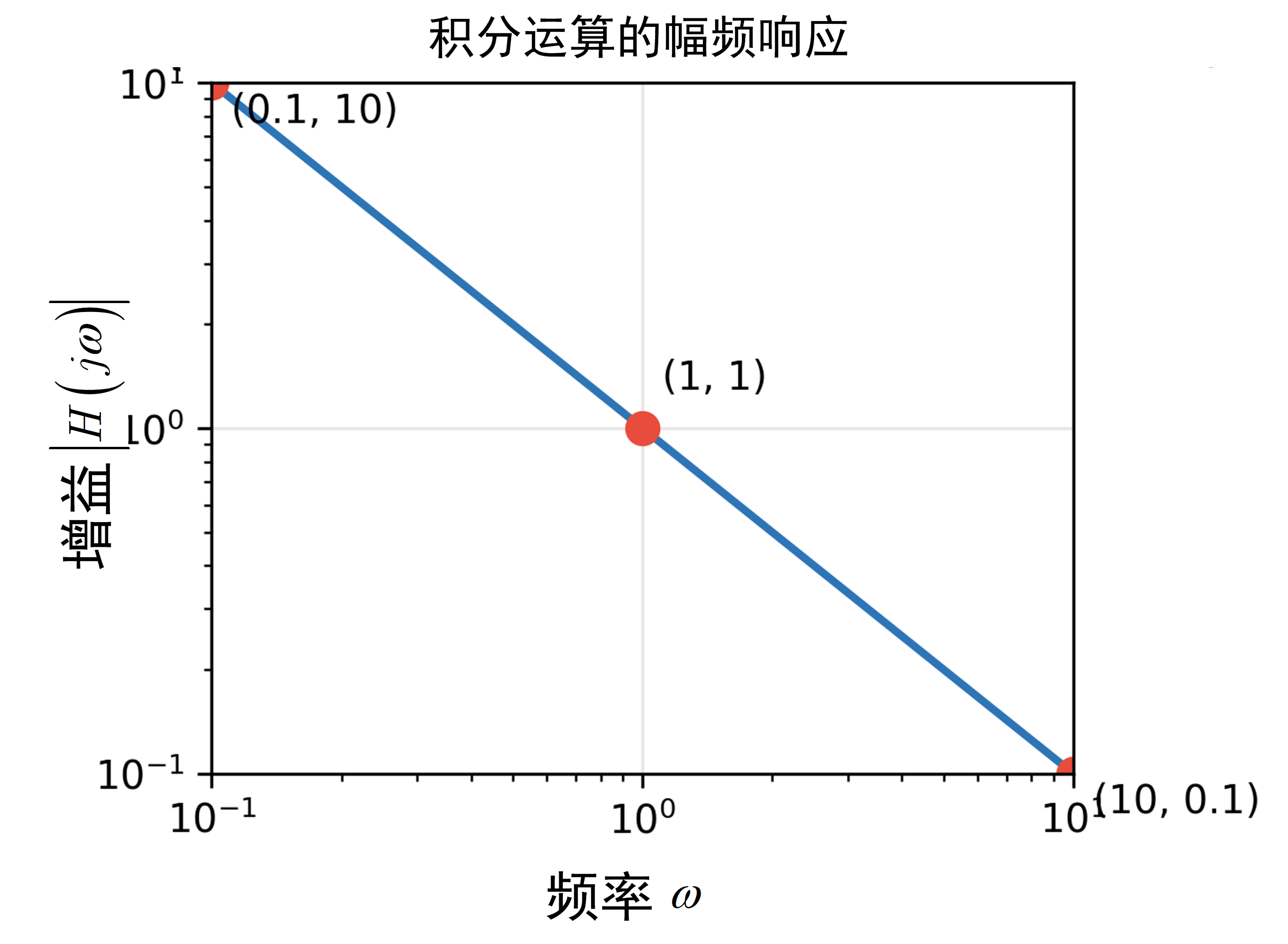
从物理意义上理解,积分运算积累的是信号的历史值,低频信号变化慢历史值与当前值相近积累效果好因此增益大,高频信号变化快历史值与当前值差异大正负抵消积累效果差因此增益小,这正是低通滤波器的本质特征。若输入信号为x(t)=Acos(ωt)x(t)=A\cos(\omega t)x(t)=Acos(ωt),经过积分器后得到y(t)=Aωsin(ωt)y(t)=\frac{A}{\omega}\sin(\omega t)y(t)=ωAsin(ωt),输出信号的幅度为Aω\frac{A}{\omega}ωA,与频率成反比。当ω=1rad/s\omega=1rad/sω=1rad/s时输出幅度等于输入幅度,当ω=0.1rad/s\omega=0.1rad/sω=0.1rad/s时输出幅度放大为输入的10倍,当ω=10rad/s\omega=10rad/sω=10rad/s时输出幅度衰减为输入的1/10。这个特性可以用一个表格来总结:低频(ω→0\omega \to 0ω→0)时增益→∞\to \infty→∞通过,高频(ω≫0\omega \gg 0ω≫0)时增益→0\to 0→0被抑制,直流(ω=0\omega=0ω=0)时增益完全通过。因此,积分器是理想的一阶低通滤波器。
积分器在工程中的典型应用是波形变换。波形变换是积分运算的直观体现,在信号发生器中经常需要将方波转换为三角波。方波信号在高电平时积分器输出线性上升,在低电平时积分器输出线性下降,经过多次积分后,方波就被转换成了三角波。这个过程中,积分器起到了低通滤波的作用,滤除了方波中的高频谐波成分,只保留基波和低频谐波,从而得到平滑的三角波。这种波形变换电路在函数发生器、PWM调制器等设备中被广泛应用。
与微分器类似,理想的积分器在物理上也无法实现。实际的RC低通滤波器是积分器的近似实现,考虑一阶RC低通电路,输入电压为 vin(t)v_{in}(t)vin(t),输出电压为 vout(t)v_{out}(t)vout(t),根据基尔霍夫定律得到 RCdvout(t)dt+vout(t)=vin(t)RC\frac{dv_{out}(t)}{dt}+v_{out}(t)=v_{in}(t)RCdtdvout(t)+vout(t)=vin(t)。当信号频率远高于截止频率(ω≫1/RC\omega\gg 1/RCω≫1/RC)时,vout(t)v_{out}(t)vout(t) 项可以忽略,电路近似为积分器 vout(t)≈1RC∫vin(t)dtv_{out}(t)\approx\frac{1}{RC}\int v_{in}(t)dtvout(t)≈RC1∫vin(t)dt;当信号频率远低于截止频率(ω≪1/RC\omega\ll 1/RCω≪1/RC)时,微分项占主导,电路近似为直通 vout(t)≈vin(t)v_{out}(t)\approx v_{in}(t)vout(t)≈vin(t)。因此RC低通滤波器在高频段表现为积分器,在低频段表现为直通,整体呈现低通特性。
三、差分器:数字高通滤波器
前面讨论的微分和积分都是连续时间运算,但在数字雷达系统中信号是离散的,我们需要用离散运算来近似连续运算。差分运算是微分运算的离散对应,考虑一个离散时间信号xnx\leftn\\rightxn,其后向差分定义为yn=xn−xn−1yn=xn-xn-1yn=xn−xn−1。这个运算的物理意义是什么?在连续时间中导数的定义是dx(t)dt=limΔt→0x(t+Δt)−x(t)Δt\frac{dx(t)}{dt}=\lim_{\Delta t\to 0}\frac{x(t+\Delta t)-x(t)}{\Delta t}dtdx(t)=limΔt→0Δtx(t+Δt)−x(t),当采样间隔TsT_sTs很小时可以用差分近似微分:dx(t)dt≈xn−xn−1Ts(5)\frac{dx(t)}{dt}\approx\frac{xn-xn-1}{T_s}(5)dtdx(t)≈Tsxn−xn−1(5)因此差分器是微分器的离散实现。为了分析差分器的频率特性,我们对差分方程做ZZZ变换得到:Y(z)=X(z)−z−1X(z)=(1−z−1)X(z)(6)Y(z)=X(z)-z^{-1}X(z)=(1-z^{-1})X(z)(6)Y(z)=X(z)−z−1X(z)=(1−z−1)X(z)(6)因此差分器的ZZZ域传递函数为H(z)=1−z−1H(z)=1-z^{-1}H(z)=1−z−1。将z=ejωz=e^{j\omega}z=ejω代入得到频域响应H(ejω)=1−e−jωH(e^{j\omega})=1-e^{-j\omega}H(ejω)=1−e−jω,利用欧拉公式e−jω=cosω−jsinωe^{-j\omega}=\cos\omega-j\sin\omegae−jω=cosω−jsinω可以化简为:H(ejω)=1−cosω+jsinω=e−jω/2⋅2jsin(ω/2)(7)H(e^{j\omega})=1-\cos\omega+j\sin\omega=e^{-j\omega/2}\cdot 2j\sin(\omega/2)(7)H(ejω)=1−cosω+jsinω=e−jω/2⋅2jsin(ω/2)(7)
因此差分器的幅频响应为:∣H(ejω)∣=2∣sin(ω/2)∣(8)|H(e^{j\omega})|=2|\sin(\omega/2)|(8)∣H(ejω)∣=2∣sin(ω/2)∣(8)相频响应为∠H(ejω)=π2−ω2\angle H(e^{j\omega})=\frac{\pi}{2}-\frac{\omega}{2}∠H(ejω)=2π−2ω。当ω→0\omega \to 0ω→0(低频)时sin(ω/2)→ω/2\sin (\omega /2)\to \omega /2sin(ω/2)→ω/2,因此∣H(ejω)∣≈ω|H({{e}^{j\omega }})|\approx \omega∣H(ejω)∣≈ω,这与连续微分器的幅频响应∣H(jω)∣=ω|H(j\omega)|=\omega∣H(jω)∣=ω一致,这意味着在低频段差分器近似为微分器。当ω=π\omega=\piω=π(奈奎斯特频率)时sin(π/2)=1\sin(\pi/2)=1sin(π/2)=1,因此∣H(ejπ)∣=2|H(e^{j\pi})|=2∣H(ejπ)∣=2,差分器在最高频率处的增益为2。
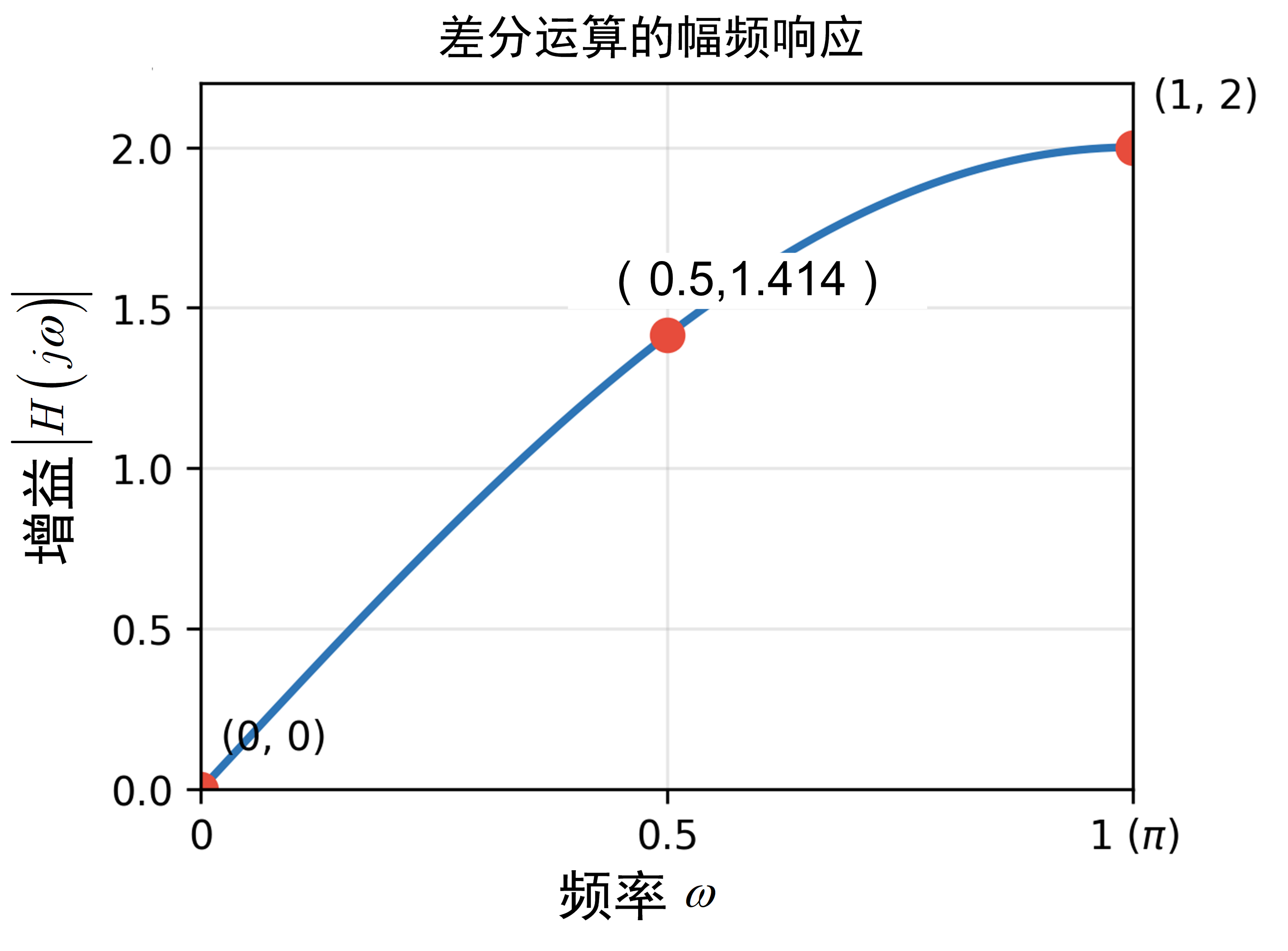
当ω=0\omega=0ω=0(直流)时sin(0)=0\sin(0)=0sin(0)=0,因此∣H(ej0)∣=0|H(e^{j0})|=0∣H(ej0)∣=0,直流信号被完全抑制。这个特性可以用一个表格来总结:低频(ω→0\omega \to 0ω→0)时增益→0\to 0→0被抑制,高频(ω→π\omega \to \piω→π)时增益→2\to 2→2通过,直流(ω=0\omega=0ω=0)时增益=0=0=0完全滤除。因此,差分器是数字高通滤波器。
差分器与微分器的频率响应有什么异同?在低频段(ω≪1\omega\ll 1ω≪1)时sin(ω/2)→ω/2\sin (\omega /2)\to \omega /2sin(ω/2)→ω/2,因此差分器的幅频响应近似为∣H(ejω)∣=2∣sin(ω/2)∣≈ω(9)|H({{e}^{j\omega }})|=2|\sin(\omega/2)|\approx\omega(9)∣H(ejω)∣=2∣sin(ω/2)∣≈ω(9),这与微分器的幅频响应∣H(jω)∣=ω|H(j\omega)|=\omega∣H(jω)∣=ω完全一致。这意味着当采样率很高时(信号频率远低于采样频率),差分器可以很好地近似微分器。但在高频段两者的差异开始显现,微分器的增益随频率线性增长没有上限,而差分器的增益在ω=π\omega=\piω=π处达到最大值2然后开始下降,这是因为离散系统的频率响应是周期的,以2π2\pi2π为周期。从物理意义上理解,差分运算检测的是相邻样本的变化量,当信号变化快(高频)时相邻样本差异大差分输出大,当信号变化慢(低频)时相邻样本差异小差分输出小,当信号为直流时相邻样本相同差分输出为零,这正是高通滤波的特性。
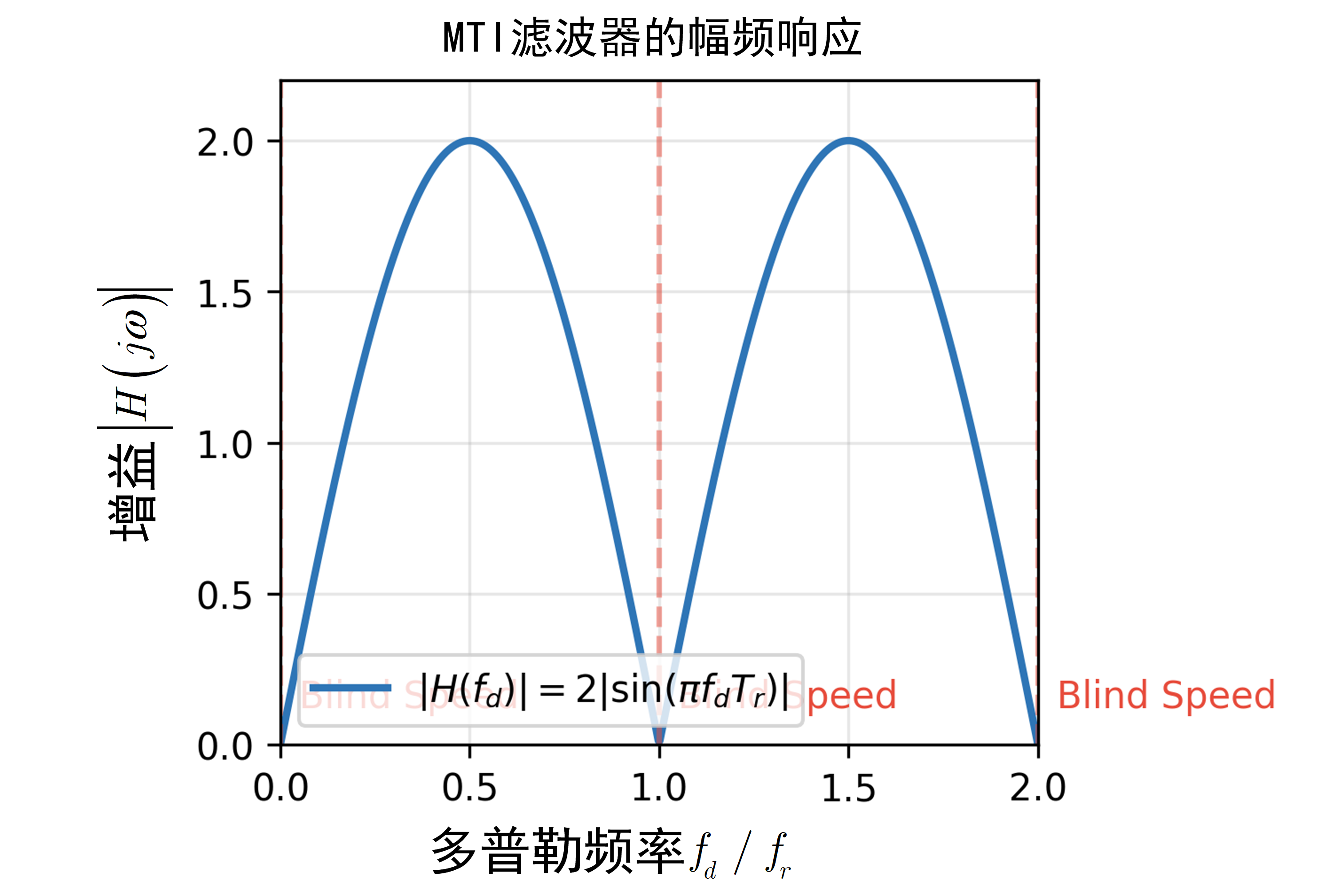
差分器在雷达中的一个典型应用是MTI(MovingTargetIndication)滤波器。MTI雷达的核心思想是:静止杂波(如地面、建筑物)的回波在相邻脉冲间幅度不变相位不变,运动目标的回波因多普勒频移而产生相位变化,通过比较相邻脉冲回波可以抑制静止杂波保留运动目标。最简单的MTI滤波器是单延迟对消器,其输出为yn=xn−xn−1yn=xn-xn-1yn=xn−xn−1,这正是差分运算!假设输入信号为xn=Aej(ωdnTr+ϕ0)xn=Ae^{j(\omega_d nT_r+\phi_0)}xn=Aej(ωdnTr+ϕ0),其中ωd\omega_dωd是多普勒频率,TrT_rTr是脉冲重复周期,经过MTI滤波器后得到yn=Aej(ωdnTr+ϕ0)−Aej(ωd(n−1)Tr+ϕ0)=Aej(ωdnTr+ϕ0)(1−e−jωdTr)yn=Ae^{j(\omega_d nT_r+\phi_0)}-Ae^{j(\omega_d (n-1)T_r+\phi_0)}=Ae^{j(\omega_d nT_r+\phi_0)}(1-e^{-j\omega_d T_r})yn=Aej(ωdnTr+ϕ0)−Aej(ωd(n−1)Tr+ϕ0)=Aej(ωdnTr+ϕ0)(1−e−jωdTr),输出幅度为∣yn∣=A∣1−e−jωdTr∣=2A∣sin(ωdTr/2)∣|yn|=A|1-e^{-j\omega_d T_r}|=2A|\sin(\omega_d T_r/2)|∣yn∣=A∣1−e−jωdTr∣=2A∣sin(ωdTr/2)∣。MTI滤波器的频率响应为∣H(fd)∣=2∣sin(πfdTr)∣|H(f_d)|=2|\sin(\pi f_d T_r)|∣H(fd)∣=2∣sin(πfdTr)∣,其中fd=ωd/2πf_d=\omega_d/2\pifd=ωd/2π是多普勒频率。这个频率响应揭示了MTI滤波器的一个重要特性:盲速。当fdTr=kf_d T_r=kfdTr=k(kkk为整数)时sin(πfdTr)=0\sin(\pi f_d T_r)=0sin(πfdTr)=0,MTI滤波器增益为零,这意味着某些速度的目标会被完全抑制,这些速度称为盲速。第一盲速对应k=1k=1k=1,即vblind=λ2Trv_{blind}=\frac{\lambda}{2T_r}vblind=2Trλ,其中λ\lambdaλ是雷达波长。举例来说,某CCC波段雷达波长λ=5cm\lambda=5cmλ=5cm,脉冲重复频率PRF=1/Tr=1kHzPRF=1/T_r=1kHzPRF=1/Tr=1kHz,第一盲速为vblind=0.052×0.001=25m/sv_{blind}=\frac{0.05}{2\times 0.001}=25m/svblind=2×0.0010.05=25m/s。这意味着速度为25m/s25m/s25m/s的目标会被MTI滤波器完全抑制,这是MTI雷达的一个固有缺陷,需要通过参差PRF等技术来克服。差分器作为高通滤波器会放大高频噪声,在实际MTI雷达中常采用多延迟对消器(如双延迟对消器、三延迟对消器),通过对多个延迟样本进行加权差分获得更好的杂波抑制效果。
四、累加器:数字低通滤波器
累加运算是积分运算的离散对应。考虑一个离散时间信号xnx\left n \\rightxn,其累加定义为yn=∑k=0nxkyn=\sum_{k=0}^{n}xkyn=∑k=0nxk,这个运算可以写成递推形式yn=yn−1+xnyn=yn-1+xnyn=yn−1+xn。这与连续积分器y(t)=∫0tx(τ)dτy(t)=\int_{0}^{t}x(\tau)d\tauy(t)=∫0tx(τ)dτ的递推形式dy(t)dt=x(t)\frac{dy(t)}{dt}=x(t)dtdy(t)=x(t)相对应。当采样间隔TsT_sTs很小时累加近似为积分∫0tx(τ)dτ≈Ts⋅∑k=0nxk\int_{0}^{t}x(\tau)d\tau\approx T_s\cdot\sum_{k=0}^{n}xk∫0tx(τ)dτ≈Ts⋅∑k=0nxk,因此累加器是积分器的离散实现。对累加器的递推方程yn=yn−1+xnyn=yn-1+xnyn=yn−1+xn做ZZZ变换得到Y(z)=z−1Y(z)+X(z)Y(z)=z^{-1}Y(z)+X(z)Y(z)=z−1Y(z)+X(z),整理得:H(z)=Y(z)X(z)=11−z−1(10)H(z)=\frac{Y(z)}{X(z)}=\frac{1}{1-z^{-1}}(10)H(z)=X(z)Y(z)=1−z−11(10)将z=ejωz=e^{j\omega}z=ejω代入得到频域响应H(ejω)=11−e−jωH(e^{j\omega})=\frac{1}{1-e^{-j\omega}}H(ejω)=1−e−jω1,利用欧拉公式化简得到H(ejω)=1−cosω−jsinω2(1−cosω)H(e^{j\omega})=\frac{1-\cos\omega-j\sin\omega}{2(1-\cos\omega)}H(ejω)=2(1−cosω)1−cosω−jsinω,幅频响应为:∣H(ejω)∣=12∣sin(ω/2)∣(11)|H(e^{j\omega})|=\frac{1}{2|\sin(\omega/2)|}(11)∣H(ejω)∣=2∣sin(ω/2)∣1(11)当ω→0\omega \to 0ω→0(低频)时sin(ω/2)→ω/2\sin (\omega /2)\to \omega /2sin(ω/2)→ω/2,因此∣H(ejω)∣→1ω|H({{e}^{j\omega }})|\to \frac{1}{\omega }∣H(ejω)∣→ω1,这与连续积分器的幅频响应∣H(jω)∣=1ω|H(j\omega)|=\frac{1}{\omega}∣H(jω)∣=ω1一致,这意味着在低频段累加器近似为积分器。当ω=π\omega=\piω=π(奈奎斯特频率)时sin(π/2)=1\sin(\pi/2)=1sin(π/2)=1,因此∣H(ejπ)∣=0.5|H(e^{j\pi})|=0.5∣H(ejπ)∣=0.5,累加器在最高频率处的增益为0.5。
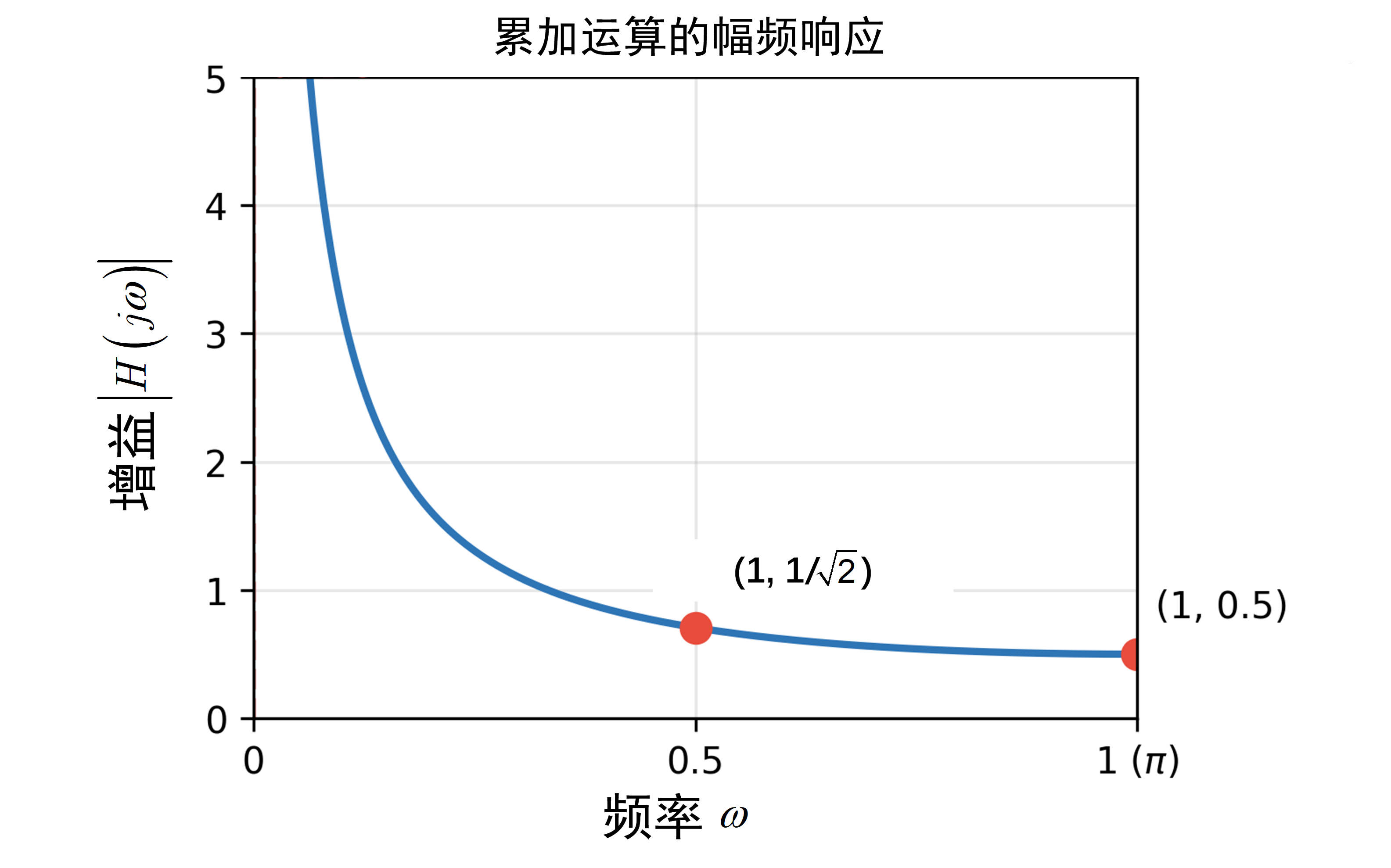
当ω→0\omega\to 0ω→0(直流)时sin(0)=0\sin(0)=0sin(0)=0,因此∣H(ej0)∣→∞|H({{e}^{j0}})|\to\infty∣H(ej0)∣→∞,直流信号被完全通过增益趋于无穷。这个特性可以用一个表格来总结:低频(ω→0\omega \to 0ω→0)时增益→∞\to \infty→∞通过,高频(ω→π\omega \to \piω→π)时增益→0.5\to 0.5→0.5被抑制,直流(ω=0\omega=0ω=0)时增益→∞\to \infty→∞完全通过。因此,累加器是数字低通滤波器。
累加器与积分器的频率响应有什么异同?在低频段(ω≪1\omega\ll1ω≪1)时累加器的幅频响应近似为:∣H(ejω)∣=12∣sin(ω/2)∣≈1ω(12)|H({{e}^{j\omega}})|=\frac{1}{2|\sin(\omega/2)|}\approx\frac{1}{\omega}(12)∣H(ejω)∣=2∣sin(ω/2)∣1≈ω1(12),这与积分器的幅频响应∣H(jω)∣=1ω|H(j\omega)|=\frac{1}{\omega}∣H(jω)∣=ω1一致,这意味着当采样率很高时累加器可以很好地近似积分器。但在高频段两者的差异开始显现,积分器的增益随频率成反比衰减没有下限,而累加器的增益在ω=π\omega=\piω=π处达到最小值0.5然后开始上升,这是因为离散系统的频率响应是周期的。
累加器在雷达中的一个典型应用是是CIC(Cascade Integrator Comb,级联积分梳状)滤波器。CIC滤波器由积分器和梳状滤波器级联而成,常用于多速率信号处理中的抽取和内插,其结构为:H(z)=1−z−M1−z−1N(13)H(z)=\\frac{1-z\^{-M}}{1-z\^{-1}}^N(13)H(z)=1−z−11−z−MN(13)其中MMM是抽取因子,NNN是级联阶数。分子部分是梳状滤波器(多个延迟差分),分母部分是积分器(累加器)。CIC滤波器的优点是不需要乘法器只需要加法和延迟单元,非常适合硬件实现;缺点是通带内有衰减,阻带衰减不够大,常需要后续的补偿滤波器。累加器作为低通滤波器存在溢出问题,当累加次数较多时累加结果可能超出数据类型的表示范围,因此在实际系统中需要采用定点或浮点处理,或者定期复位累加器。此外,累加器的相位响应是非线性的,可能引起信号失真,在对相位敏感的应用中需要采用线性相位滤波器。
五、微分、积分、差分:核心洞察
微分与积分:连续域的逆运算
微分和积分是连续时间信号处理中最基本的一对运算。从频率响应来看:
H(jω)=jω{{H}{}}(j\omega)=j\omegaH(jω)=jω,H(jω)=1jω{{H}{}}(j\omega)=\frac{1}{j\omega}H(jω)=jω1。两者互为倒数:H(jω)⋅H(jω)=jω⋅1jω=1{{H}{}}(j\omega )\cdot {{H}{}}(j\omega )=j\omega \cdot \frac{1}{j\omega }=1H(jω)⋅H(jω)=jω⋅jω1=1。这意味着微分和积分是逆运算,对一个信号先微分再积分或者先积分再微分,结果还原为原信号(忽略常数项)。从物理意义上理解,微分检测变化,积分积累能量;微分是高通,积分是低通。这一对运算构成了连续时间信号处理的基础。
微分与差分:连续与离散的对应
微分和差分是同一概念在连续和离散域的不同实现。在时域中差分是微分的近似:dx(t)dt≈xn−xn−1Ts\frac{dx(t)}{dt}\approx \frac{xn-xn-1}{{{T}{s}}}dtdx(t)≈Tsxn−xn−1。在频域中当频率较低时(ω≪1\omega\ll 1ω≪1),差分的频率响应近似为微分:∣H(ejω)∣=2∣sin(ω/2)∣≈ω=∣H(jω)∣|{{H}{}}({{e}^{j\omega }})|=2|\sin (\omega /2)|\approx \omega =|{{H}_{}}(j\omega )|∣H(ejω)∣=2∣sin(ω/2)∣≈ω=∣H(jω)∣。但当频率接近奈奎斯特频率时两者的差异开始显现,微分的增益随频率线性增长没有上限,差分的增益在ω=π\omega=\piω=π处达到最大值2。这意味着采样率越高差分越接近微分,当采样率趋于无穷时差分收敛于微分,这是连续与离散的统一。
滤波器设计的本质
从运算的角度理解滤波器可以获得更直观的认识。高通滤波器的本质是微分/差分运算,它检测信号的变化,抑制缓慢变化的成分(低频),放大快速变化的成分(高频)。低通滤波器的本质是积分/累加运算,它积累信号的历史值,抑制快速变化的成分(高频),通过缓慢变化的成分(低频)。带通滤波器可以看作高通和低通的组合,先通过高通滤除低频再通过低通滤除高频,保留中间频段。带阻滤波器可以看作低通和高通的并联,低频通过低通高频通过高通,中间频段被抑制。从运算的角度设计滤波器比从传递函数出发更直观,先确定需要什么运算(微分、积分、差分、累加),再组合成所需的频率响应。
六、总结
理解了微分、积分、差分这三种基本运算的频率特性,就理解了滤波器的本质。微分是连续高通,检测变化,放大高频,应用于鉴频器、边缘检测;积分是连续低通,积累能量,抑制高频,应用于波形转换、脉冲积累;差分是数字高通,是微分的离散实现,应用于MTI滤波器、数字微分器。连续与离散是统一的,差分在采样率趋于无穷时收敛于微分,累加收敛于积分。滤波器不是黑箱,本质就是基本运算的组合。