foc进阶篇3------对比PLL测速,为M法加低通正名
相信大部分人在刚开始接触编码器时,对电机的转速获取基本都是使用M法测速加低通滤波的方式。但随着工作学习的不断深入,会逐渐听到有人说PLL测速更好,诸如什么"pll是观测器"、"pll的积分环节会让数据更平滑"等理由。于是自己也开始使用pll测速,似乎是比M法低通更好,但具体好在哪里又说不清楚。
不过今天我就直接告诉大家,有些结构的PLL测速是可以和M法加IIR低通完全等效的,而有些还不如M法加低通。破除迷信,为M法测速加低通滤波正名。
注:本文所述的PLL仅针对有感的编码器测速,并不涉及电角度滤波更不涉及无感的电角度获取。
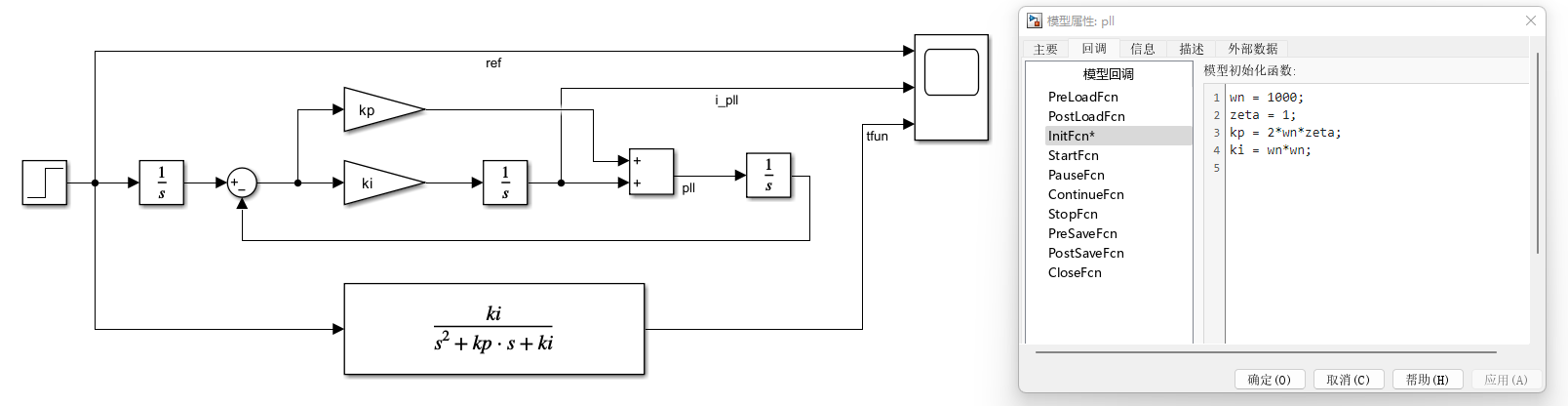
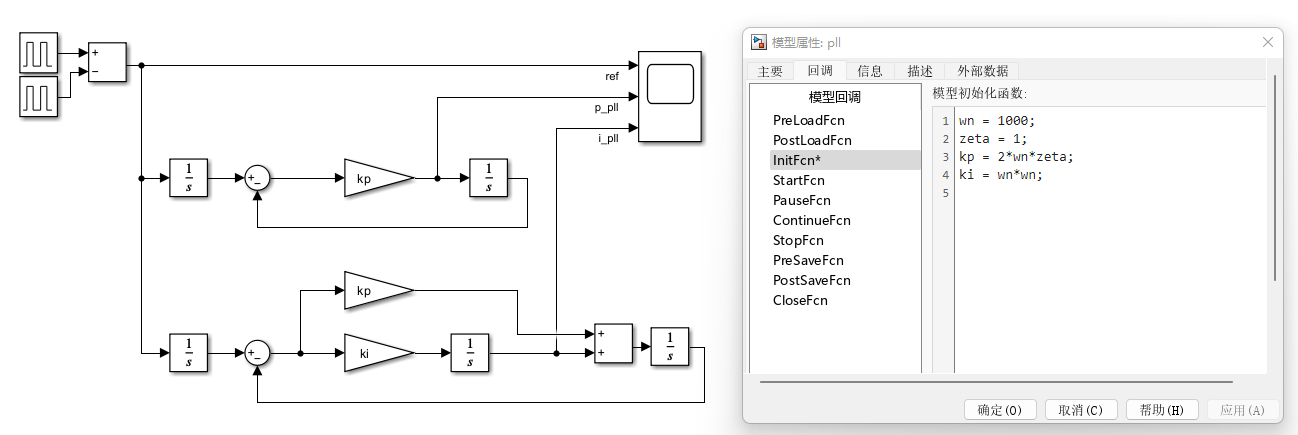
1.经典结构的PLL测速
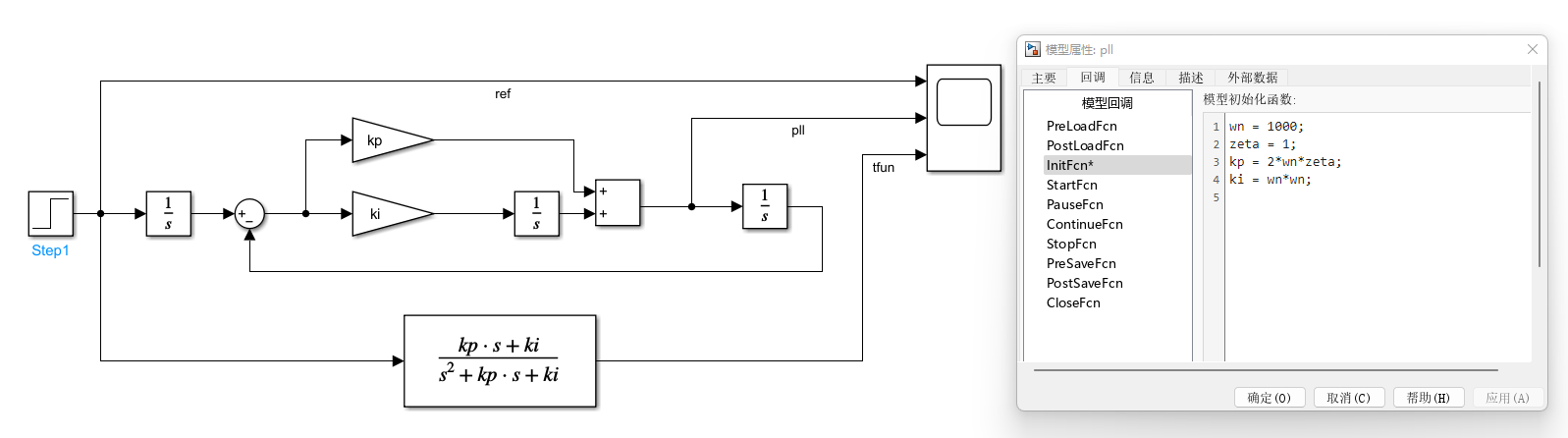
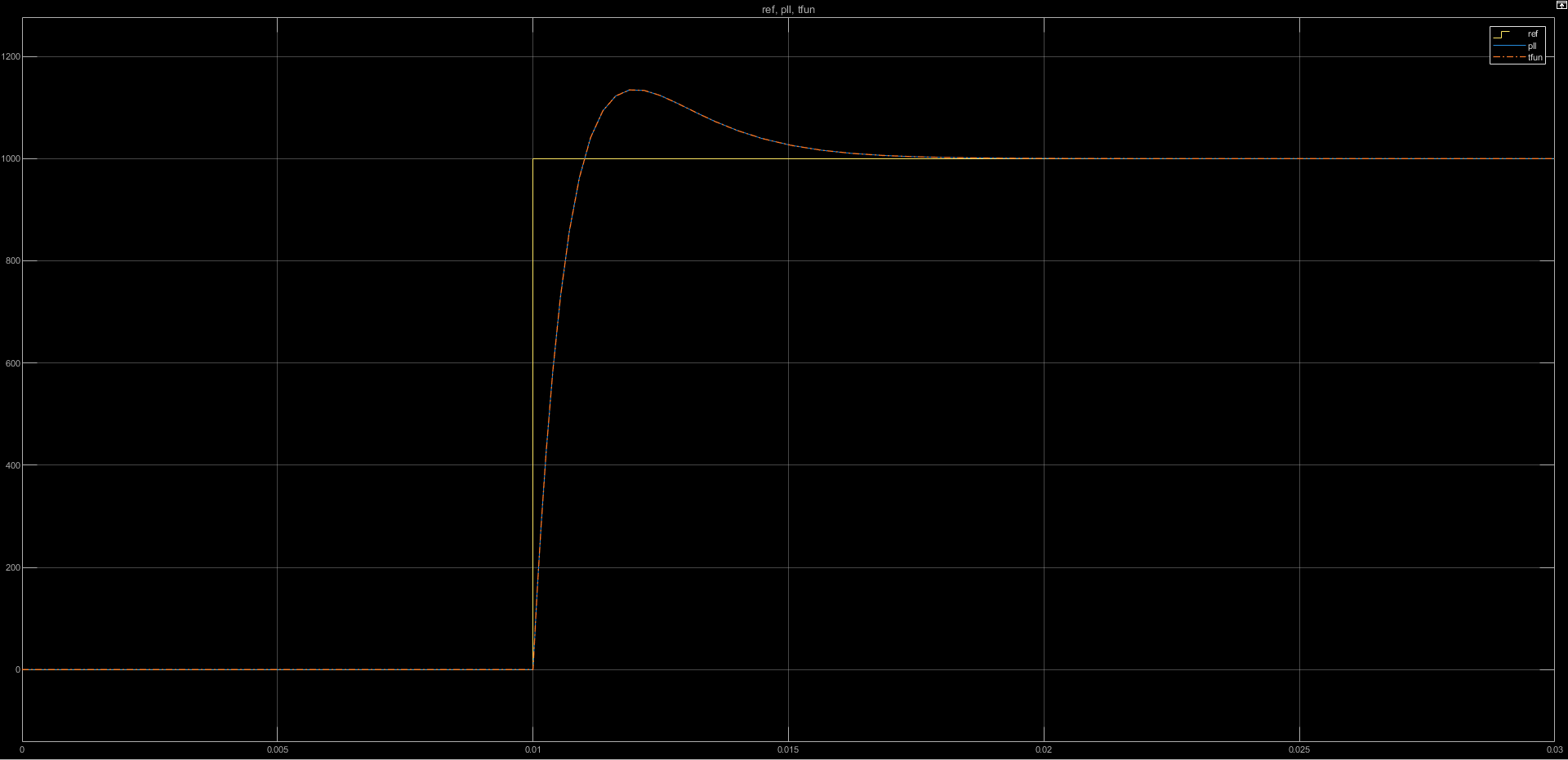
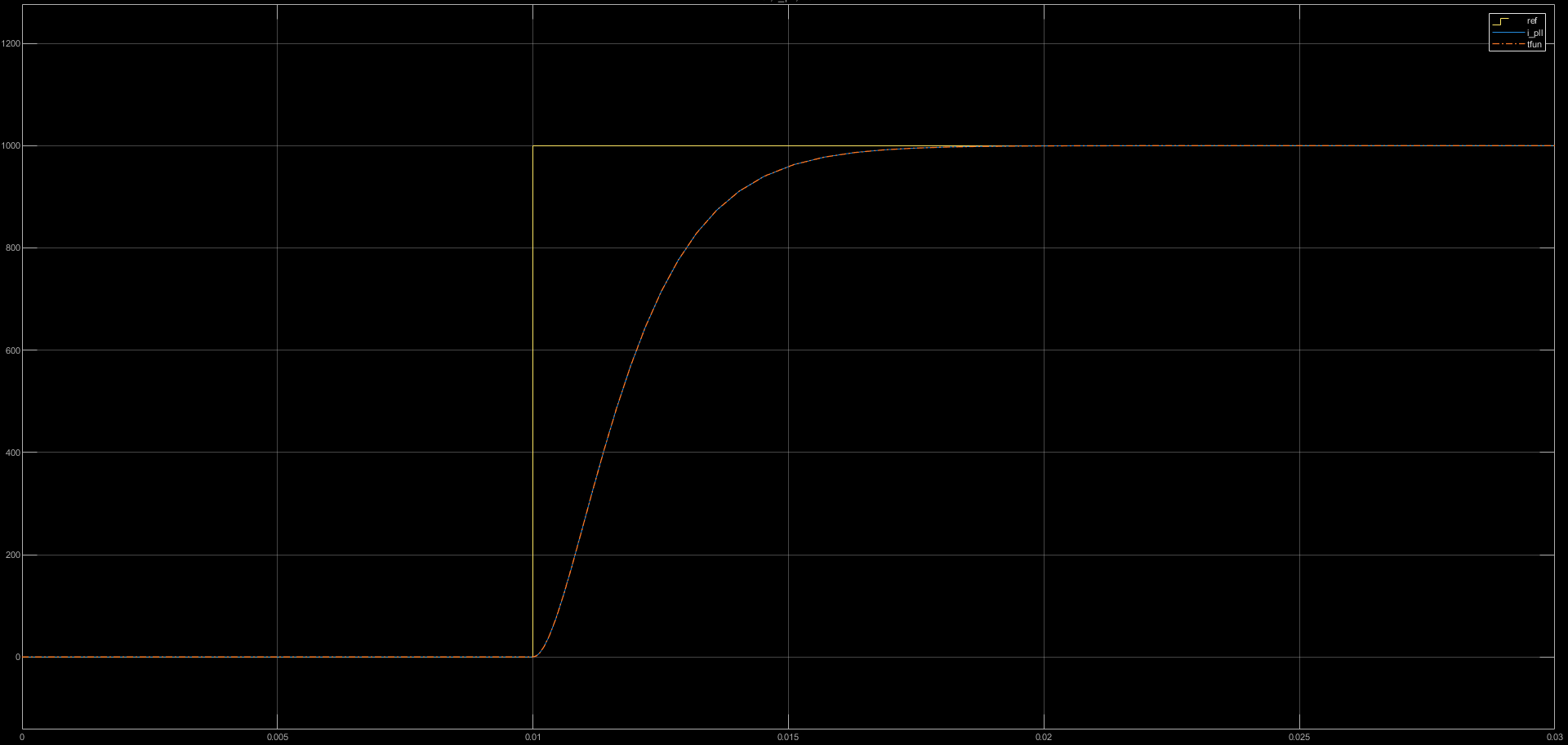
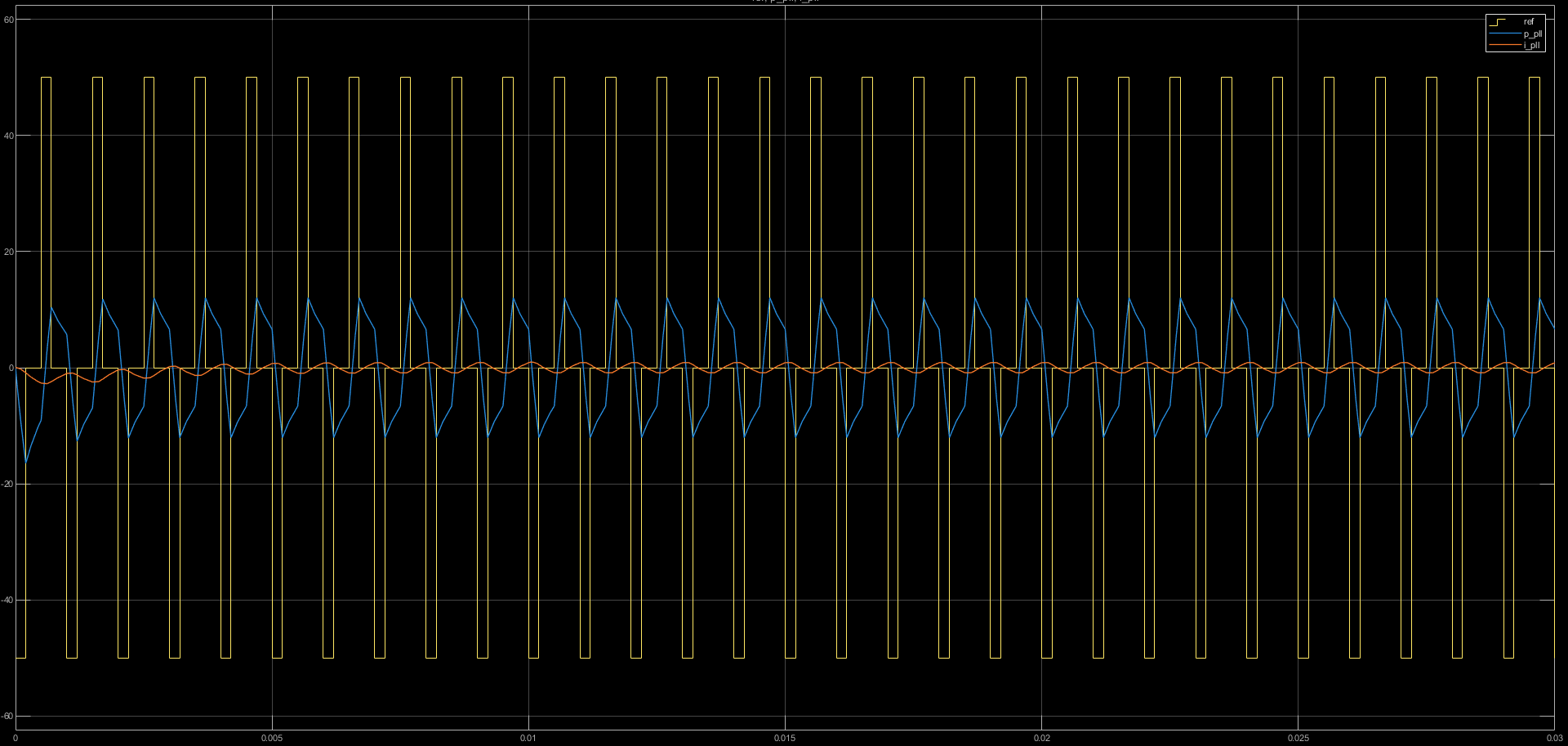
结论:由于这种结构的pll传递函数并不是标准的二阶弹簧阻尼的形式,因此即使阻尼比设置为1也仍然会过冲。不建议将它用到速度环的反馈中。
2. 纯P环节的PLL测速
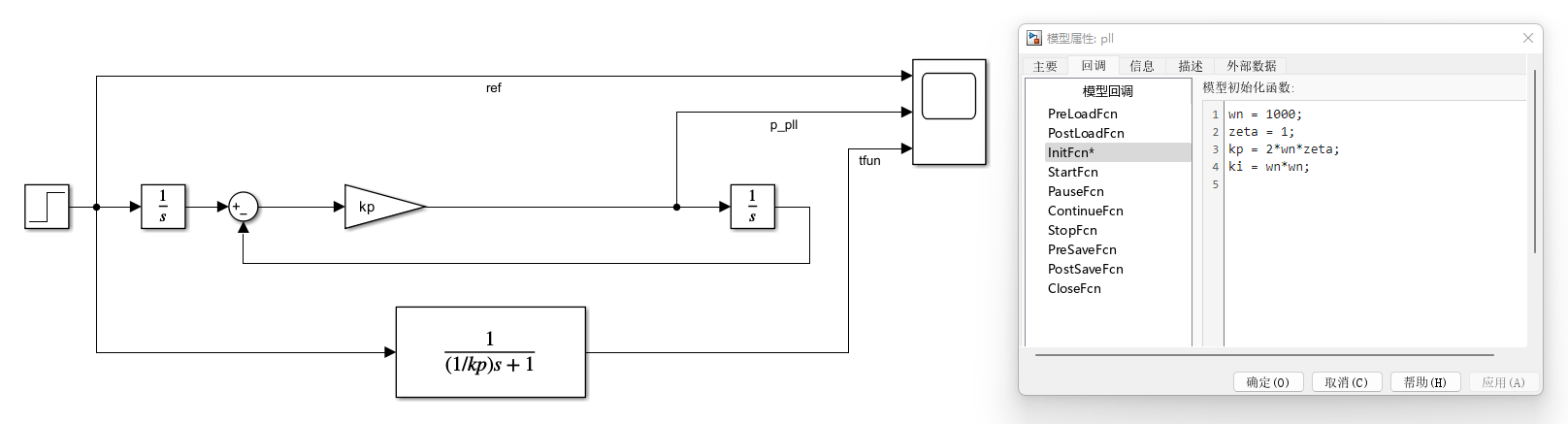
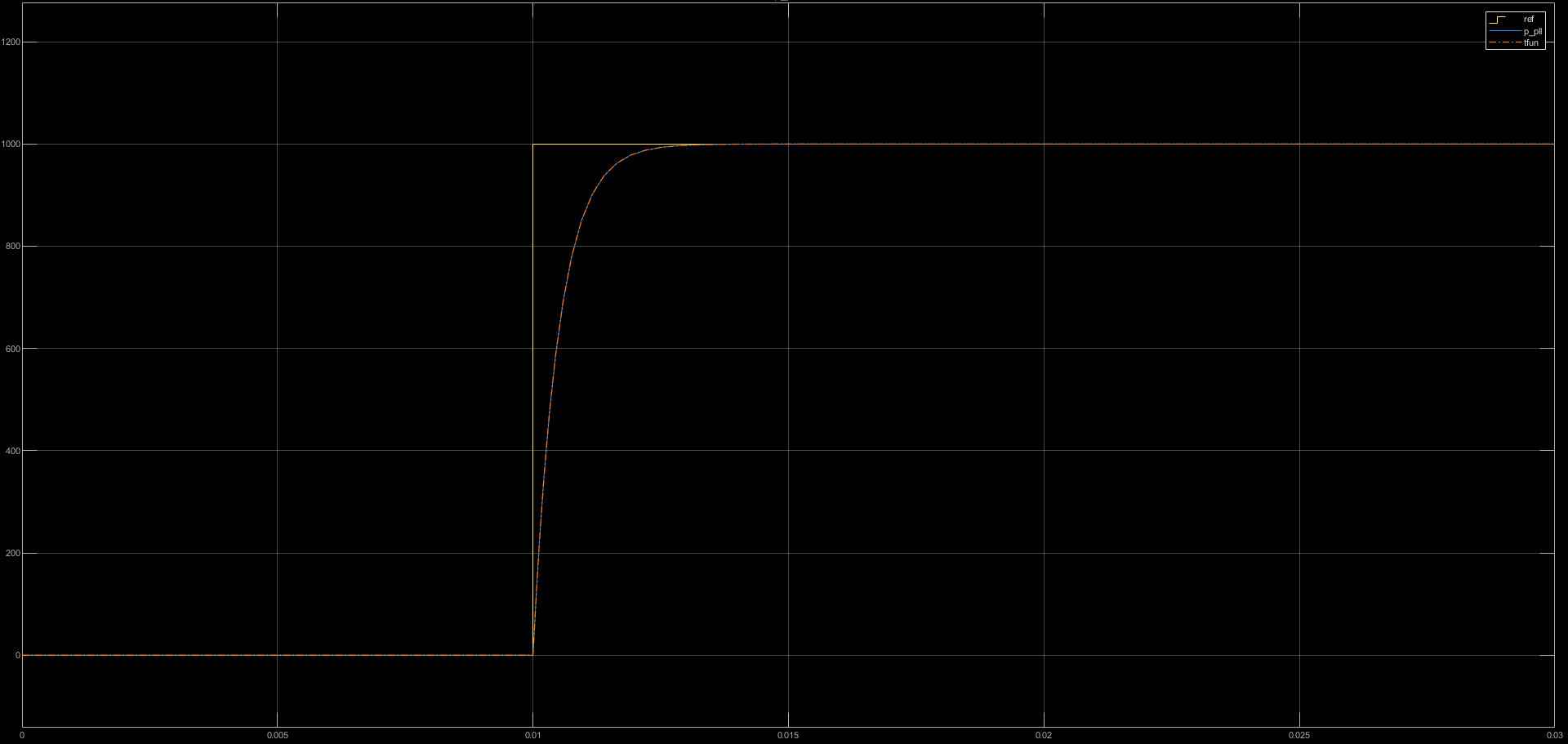
结论:不难发现,纯P环节的PLL测速其实就相当于一阶低通滤波,时间常数为(1/kp)。
3. 仅引出积分项的PLL测速
结论:这种结构的PLL测速就相当于二阶低通滤波,可以通过设置kp、ki来修改ωn和ζ。而对于ζ=1的特例,也可以将两个一阶低通串联达到相同的效果。
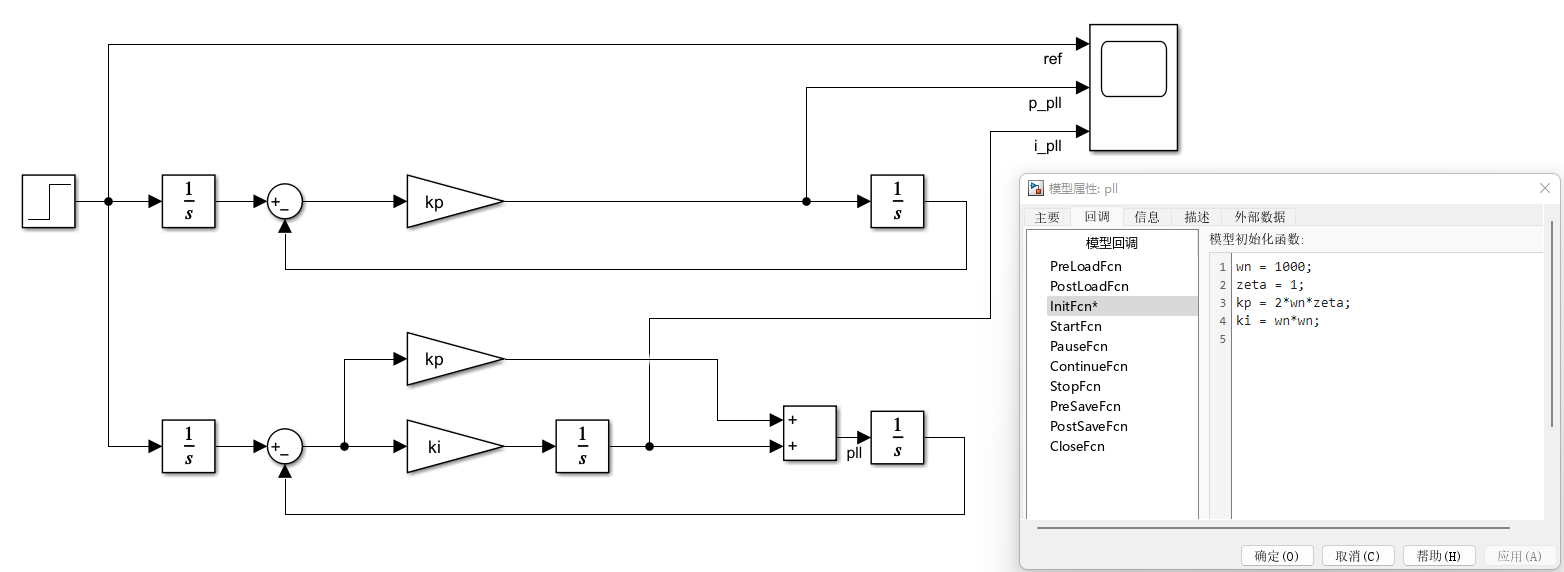
4.纯p环节PLL和引出积分项PLL对比
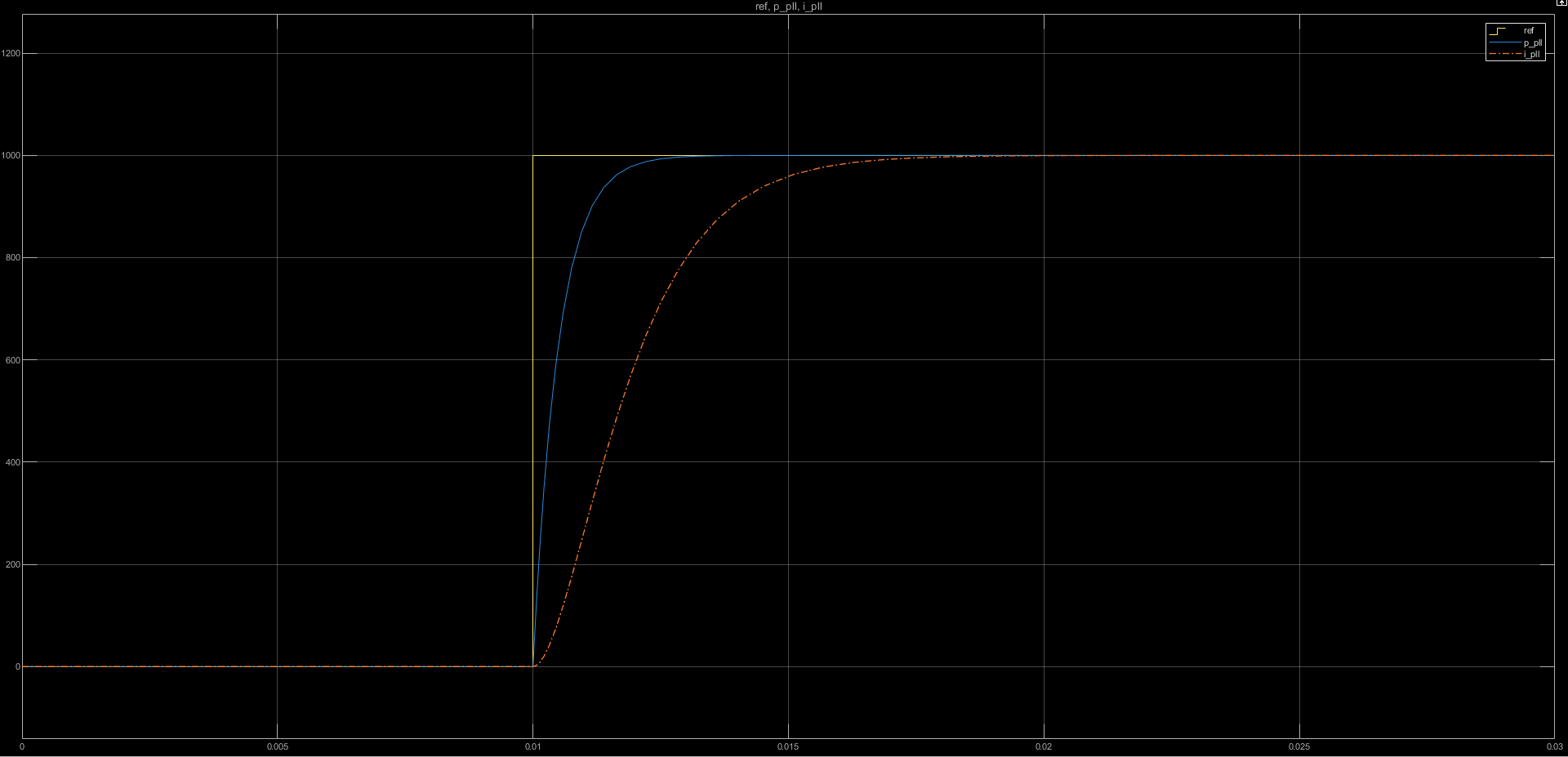
(1)阶跃响应对比
(2)噪声抑制对比
结论:不难发现,在ωn一样的情况下,引出积分项的pll更加平滑但也更加滞后(其实就是二阶低通对比一阶低通)。
注:以上全部实验都是基于连续模型,只是为了给大家一个感性认识。实际跑在单片机上是离散的,对于ωn等参数不可以直接等效而是需要换算。
5.代码实测
(1)三种PLL的对比
首先定义三种pll及函数(注意,这些pll测的速度是电角速度,单位rad/s。实际使用将其转化为机械转速,单位RPM)
c
#define DT 0.00005f
#define PI_F 3.14159265359f
#define WN 1000.0f
#define ZETA 1.0f
struct PLL_TYPE
{
float32_t kp, ki;
float32_t I;
float32_t angle, speed;
};
/*经典结构PLL*/
struct PLL_TYPE pll = {
.kp = 2.0f * WN * ZETA,
.ki = WN * WN
};
/*纯P环节PLL*/
struct PLL_TYPE pll_p = {
.kp = 2.0f * WN * ZETA,
};
/*引出积分项PLL*/
struct PLL_TYPE pll_i = {
.kp = 2.0f * WN * ZETA,
.ki = WN * WN
};
/*经典结构PLL*/
void PLL_Get(struct PLL_TYPE *pll, float32_t angleIn)
{
float32_t error = angleIn - pll->angle;
if(error > PI_F)
error -= PI_F * 2.0f;
else if(error < -PI_F)
error += PI_F * 2.0f;
pll->I += pll->ki * error * DT;
pll->speed = pll->kp * error + I;
pll->angle += pll->speed * DT;
if(pll->angle > PI_F * 2.0f)
pll->angle -= PI_F * 2.0f;
else if(pll->angle < 0.0f)
pll->angle += PI_F * 2.0f;
}
/*纯P环节PLL*/
void PLL_P_Get(struct PLL_TYPE *pll, float32_t angleIn)
{
float32_t error = angleIn - pll->angle;
if(error > PI_F)
error -= PI_F * 2.0f;
else if(error < -PI_F)
error += PI_F * 2.0f;
pll->speed = pll->kp * error;
pll->angle += pll->speed * DT;
if(pll->angle > PI_F * 2.0f)
pll->angle -= PI_F * 2.0f;
else if(pll->angle < 0.0f)
pll->angle += PI_F * 2.0f;
}
/*引出积分项PLL*/
void PLL_I_Get(struct PLL_TYPE *pll, float32_t angleIn)
{
float32_t error = angleIn - pll->angle;
if(error > PI_F)
error -= PI_F * 2.0f;
else if(error < -PI_F)
error += PI_F * 2.0f;
pll->speed += pll->ki * error * DT;
pll->angle += (pll->speed + pll->kp * error) * DT;
if(pll->angle > PI_F * 2.0f)
pll->angle -= PI_F * 2.0f;
else if(pll->angle < 0.0f)
pll->angle += PI_F * 2.0f;
}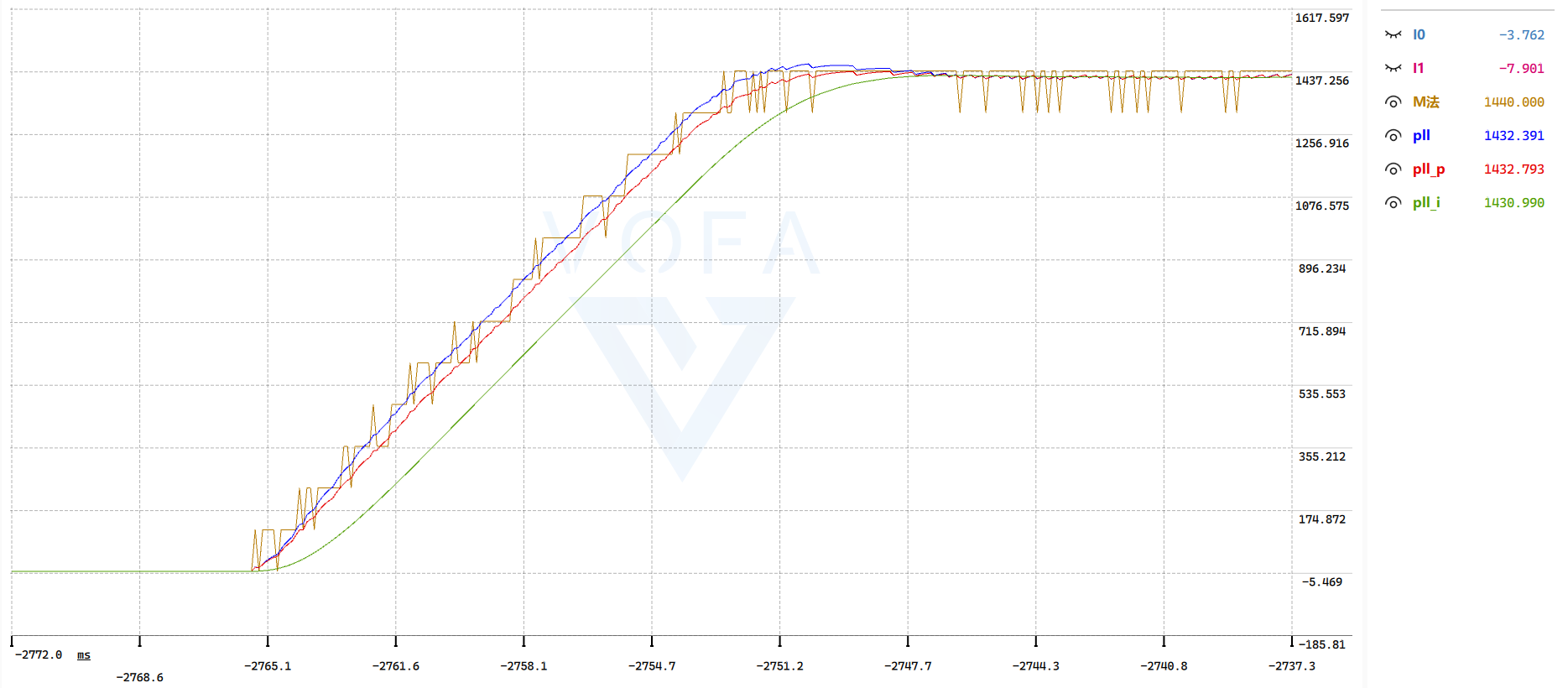
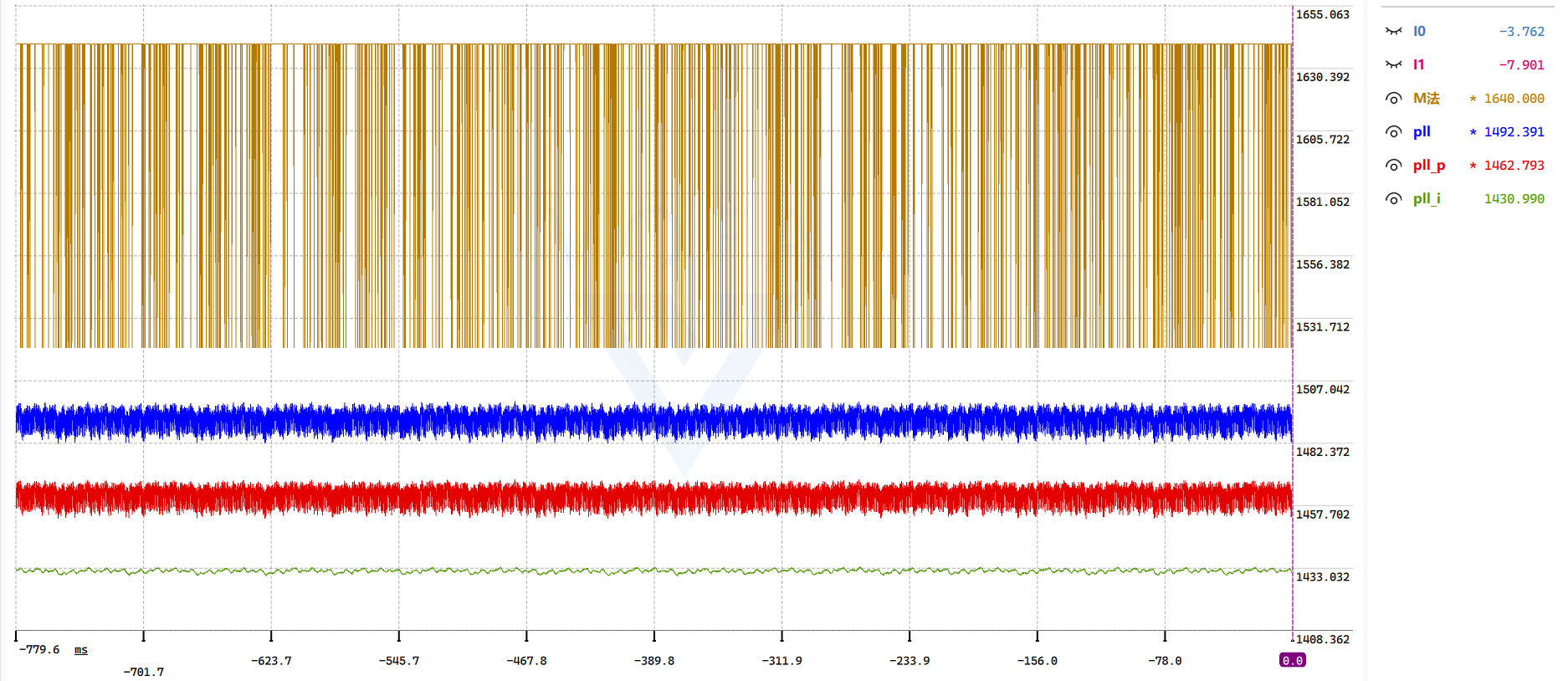
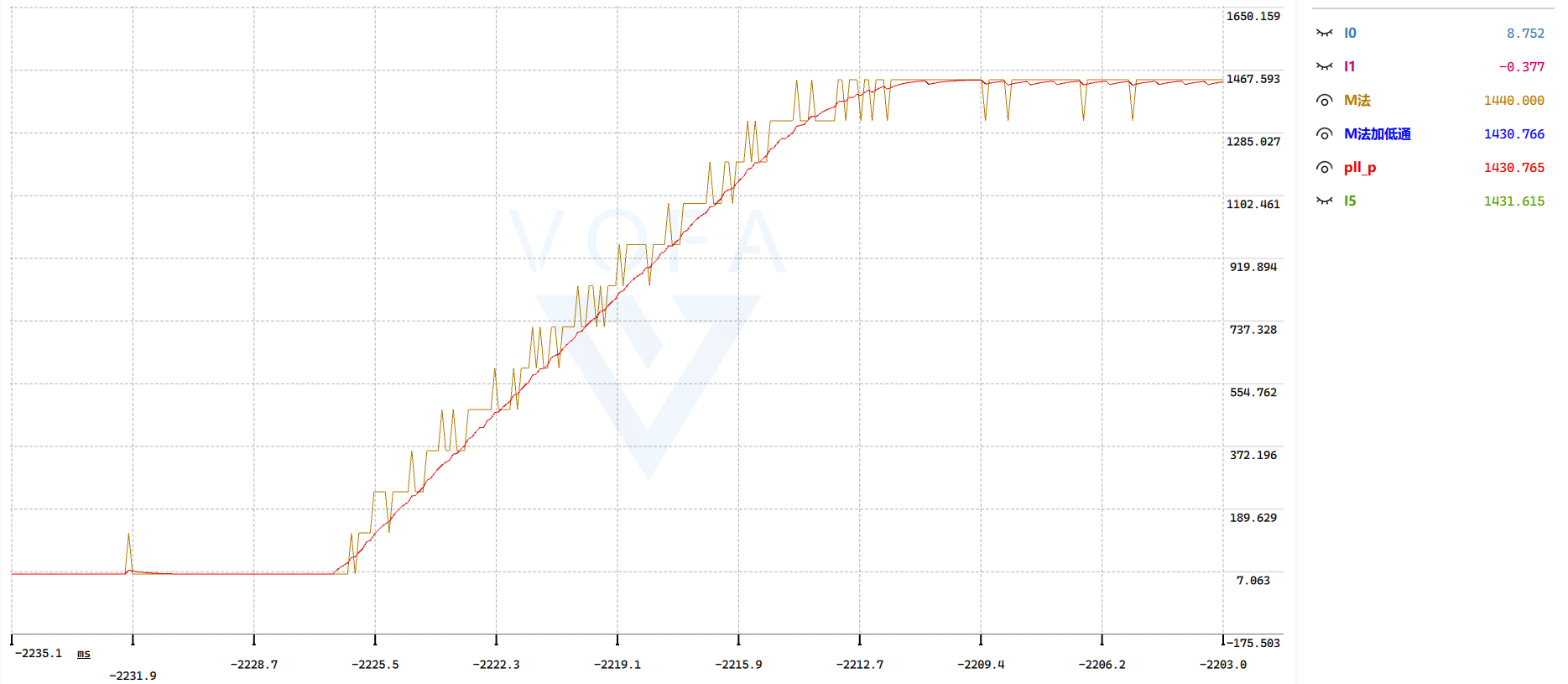
可以看到,经典pll虽然相位上比较超前,但出现了过冲(由前面仿真得知这个过冲很可能比真实速度更高);纯P环节pll在相位滞后以及毛刺抑制上属于中间水平;引出积分项的pll测速最平滑但也最滞后。
(这里我使用电流环给iq指令让电机加速。三种pll的执行频率都为20kHz,上位机的打印频率为10kHz。)
(2)纯P环节PLL和M法加一阶低通对比
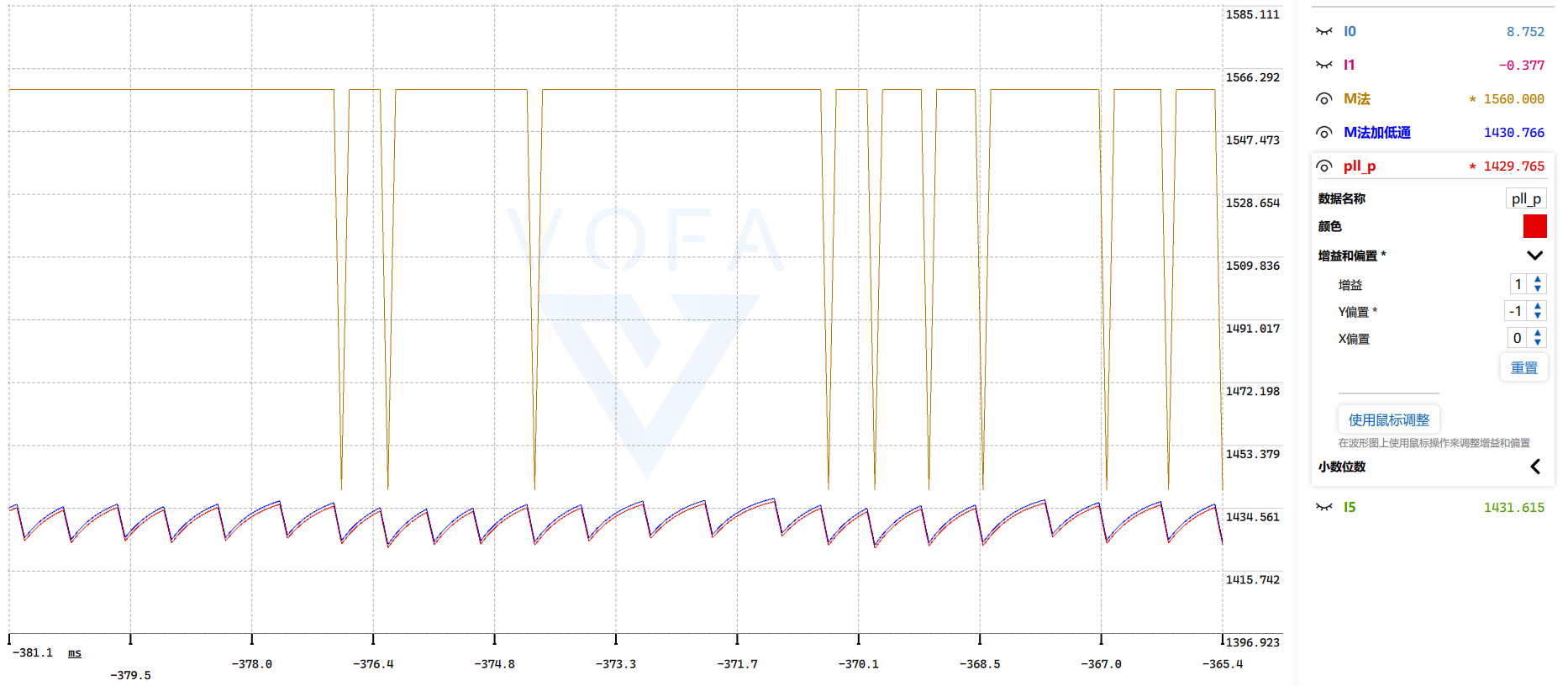
纯P环节pll和M法加低通测速完全重合了,第二张图加了一点Y轴偏置才得以看出。(这里pll的kp=2000,执行频率为20kHz;M法的采样频率和滤波频率也为20kHz,滤波系数为0.1。不知道有没有人发现了什么。)
看到这里,可能会有人疑惑。为什么我的M法测速加低通滤波不是这个效果?其实是采样频率的问题。
6.M法加低通不如PLL的原因
相信大家在学习速度环的时候,大概都听过这样一句话:"由于电机的机械时间常数远大于电气时间常数,所以速度环的执行频率一般是电流环的十分之一"。这里先不评价这句话,但相信大概率会因为听了这句话,选择把M法测速的采样频率也拉到电流环执行频率的十分之一。
这里将M法测速及滤波的频率降低到2kHz,对比20kHz执行频率的纯P环节pll。(这里为了保证低通滤波的截止频率与之前接近,因此滤波系数改为0.526,pll的参数不变。)
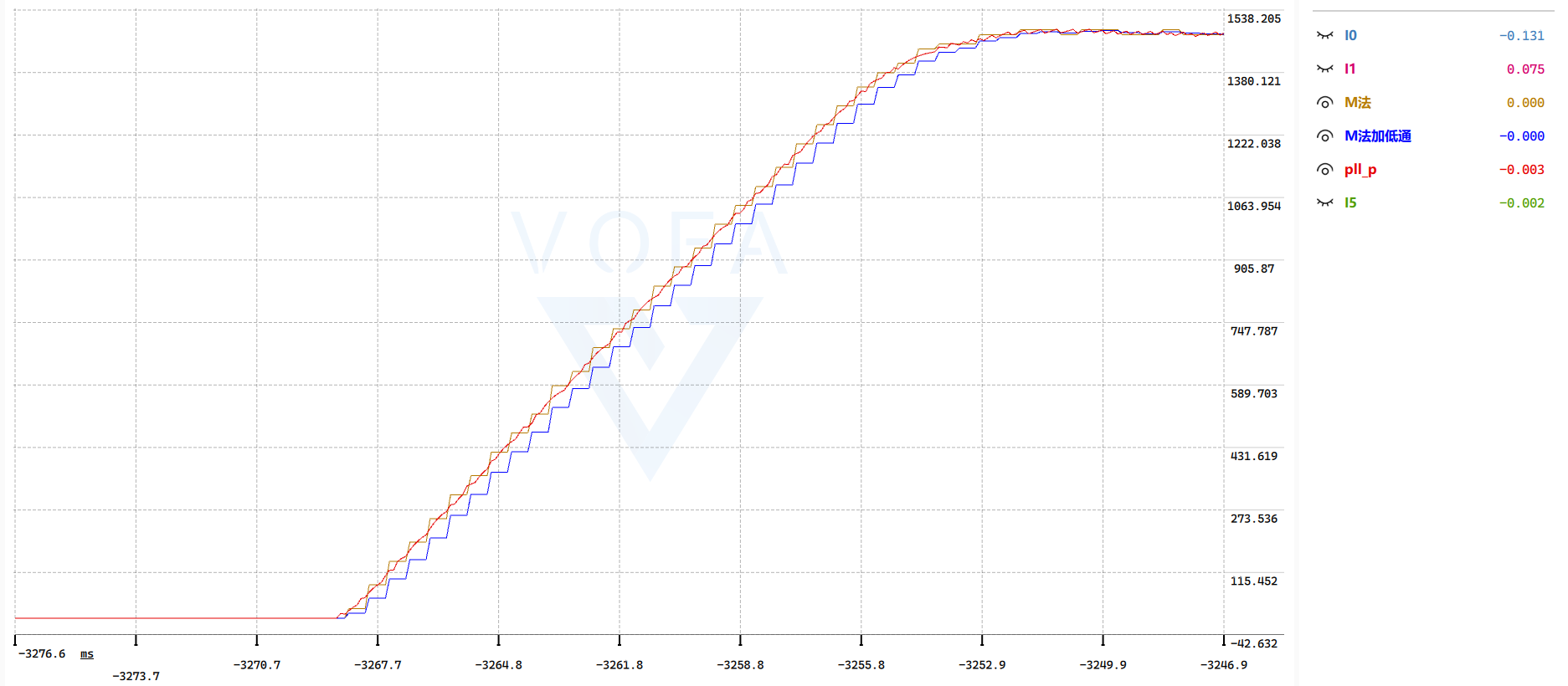
发现没有,M法加低通测速的波形变成了阶梯状,并且整体相对pll更滞后一些。(大家也可以尝试使用2kHz采样的M法配合20kHz的滤波,滤波系数为0.1,去对比pll测速。我这里已经试过了,虽然阶梯状没有了,但相比pll还是滞后了。)
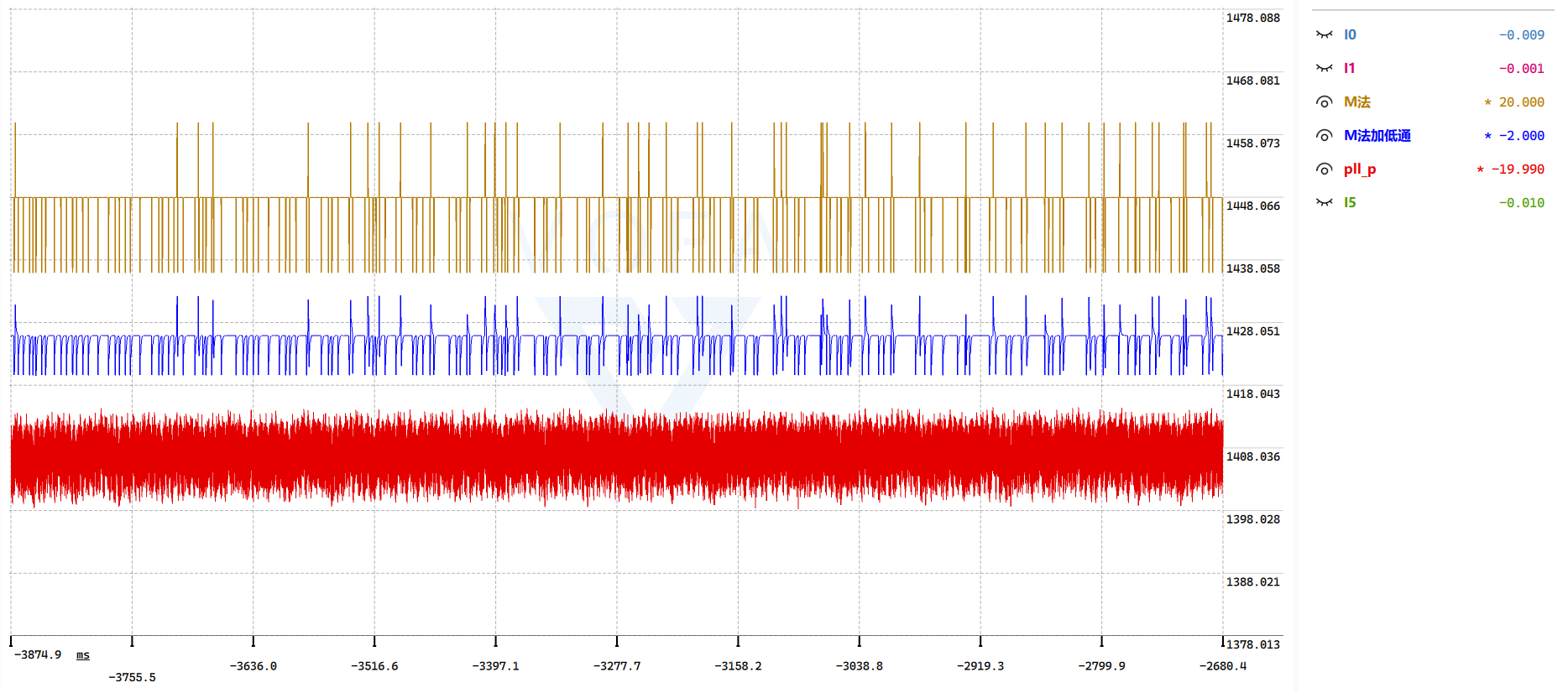
还有,这里2kHz采样的M法相比前面20kHz采样的噪声低了很多,并且最左边的点连起来的相位相比pll超前,可不可以用它来做速度反馈?如果你的速度环执行频率也是2k的话,那么确实可以。但请注意,它的数据更新频率也只有2k,如果你后面打算将速度环的执行频率提高到4k、5k甚至10k,那么当中有几次的反馈值都是之前的、不变的。这里我更加建议使用20kHz采样的M法测速加十次滑动平均滤波来代替2kHz采样的M法测速,这样既可以达到相同的噪声水平,又能保证数据的更新频率,而且滞后程度也是一样的(对比2k采样M法最左边的点连起来的线)。
结论:为什么你感觉M法加低通效果不如pll好,就是因为采样频率的问题。你的M法采样频率只有电流环执行频率的十分之一,而pll一般和电流环同频,正是因为这一点导致M法丢失了一些信息。
7.总结
1.经典结构的pll测速在面对阶跃信号或斜率较高的信号会产生虚假过冲,如果将它作为速度环的反馈可能会引起更大的过冲以及振荡,不建议使用。
2.纯p结构的pll测速基本可以等效为M法测速加一阶IIR低通滤波。但是要注意,这种方法不可以用于角度跟踪滤波,因为存在稳态误差(角度滞后)。还有,使用的时候kp要比较大(或者说ωn不能太低),否则电机加速度大会出现失锁的可能,这点与低通滤波不同。
3.仅引出积分项的pll测速基本可以等效为M法测速加二阶IIR低通滤波。
4.M法的采样频率要尽可能的高,不用担心低速时两次采样采不到脉冲增量,只要配合低通滤波即可。但要注意,编码器分辨率越低,低速时的毛刺就越大,如果加大滤波则会引入更多延迟和滞后(这一点PLL也是一样的)。既想要毛刺小又想要延迟滞后少,那就要使用更高分辨率的编码器配合较小的滤波(或者速度观测器,不过这玩意也有局限性)。
5.虽然pll测速可以等效为M法加低通的形式,并且相比M法加低通,pll更容易出现失锁的情况(如果ωn设置过低),但有几个地方是M法加低通不可比拟的。首先它可以在测速的同时给电角度滤波。其次它可以稍加改造变成速度观测器和扰动观测器,这一点后面有机会再说。
参考资料
https://zhuanlan.zhihu.com/p/665627084