一、坐标系定义对齐(结合PDF与小车实际)
1.1 PDF讲义中的坐标系定义
-
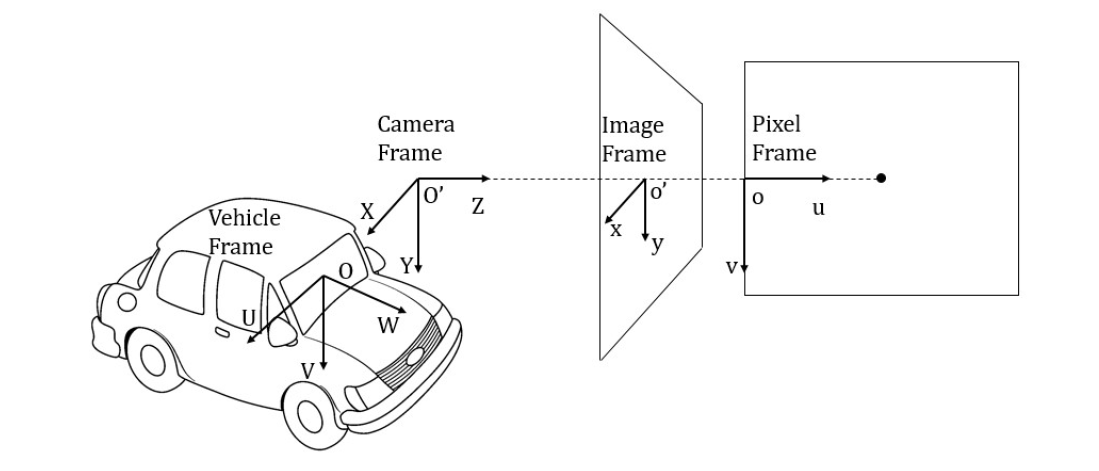
相机坐标系 (Camera Frame):原点在相机光心,Yc轴垂直于地面向下,Zc轴指向车辆前方,Xc轴指向车辆右侧(右手系)。
-
像素坐标系(Pixel Frame):u为列,v为行。
-
车辆坐标系 (Vehicle Frame):原点在前轮轴心地面投影,X轴横向 (右为正),Z轴纵向(前为正)。
1.2 教学小车实际安装参数(我实验时小车安装情况)
-
相机安装点:前轮轴心正上方,高度 H = 300 mm = 0.3 m。
-
纵向偏置:相机光心向前偏移 D = 70 mm = 0.07 m(在车辆坐标系中,Z方向 +0.07 m)。
-
相机姿态:垂直向下 ,即相机光轴与地面垂直。此时相机坐标系的 Yc 轴垂直向下 ,与车辆坐标系的 Y 轴(垂直向上) 相反。PPT中正是如此定义的。
1.3 坐标系示意图
侧视图(沿车辆X轴方向看):
相机光心 ●
|
| Yc (垂直向下)
↓
地面=========================== (Z=0 平面)
↑
前轮轴心投影点 O_v (车辆坐标系原点)
|← D = 0.07m →|
俯视图(从上往下看):
Z_v (车辆前进方向)
↑
|
| [相机视野范围]
| +--------+
| | |
| | ● | ← 车道线上一点 P
| | |
| +--------+
|
*------------→ X_v (车辆右侧)
原点 O_v二、垂直俯视情况下的坐标转换推导
2.1 已知量
-
内参矩阵(从Matlab标定获得):
-
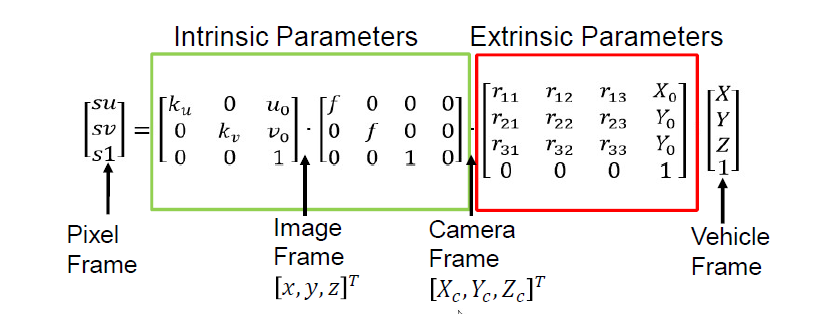
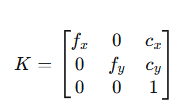
注意:PDF中Matlab输出的 IntrinsicMatrix 是转置形式,使用前需转置。
-
安装参数:
-
相机高度(地面到光心):
H = 0.3m -
前向偏置(光心在车辆坐标系Z向坐标):
D = 0.07m
-
2.2 相机坐标系与车辆坐标系的关系(垂直向下)
因为相机垂直向下,旋转矩阵 R=IR=I(单位阵),但坐标轴方向需注意:
-
相机坐标系:XcXc 向右,YcYc 向下,ZcZc 向前(与车辆坐标系 ZvZv 同向)。
-
车辆坐标系:XvXv 向右,YvYv 向上,ZvZv 向前。
因此,地面一点在相机坐标系 下的坐标 (Xc,Yc,Zc)(Xc,Yc,Zc) 与其在车辆坐标系下的坐标 (Xv,Yv=0,Zv) 的关系为:
Xc=Xv
Yc=H(地面在相机下方 H 处)
Zc=Zv−D
注意:这里 Yc=HYc=H 是因为地面点恰好在光心正下方距离H处。 所有地面点的 Yc 均恒等于相机高度 HH。
2.3 投影方程
透视投影公式:
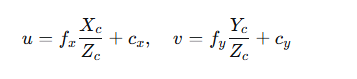
将 Yc=HYc=H 代入得:

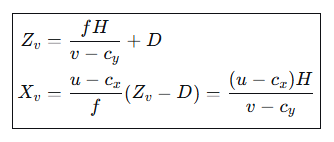
2.4 反解车辆坐标(横向偏差与纵向距离)
由第二式解出纵向距离 Zv :

再由第一式解出横向坐标 XvXv:

因此:

也可以直接用已知的 代入,得到:
代入,得到:
若 fx≈fyfx≈fy(通常如此),则简化为:
教学提示:这个简化公式极具物理意义------横向偏差与像素横向偏移成正比,与像素纵向坐标成反比(越往下看,距离越近,相同横向像素对应的实际横向距离越小)。但对于垂直安装,其实因为 YcYc 恒为H,纵向距离 ZvZv 完全由 vv 决定,公式简单直接。
2.5 最终实用公式(垂直俯视专用)
在 fx=fy=ffx=fy=f 的近似下(多数廉价USB相机成立),可进一步简化为:
三、Matlab实现(融合PDF标定结果与安装参数)
3.1 加载相机参数并提取内参
matlab
% 加载标定结果(假设已通过Camera Calibrator导出cameraParams.mat)
load('cameraParams.mat');
% 提取内参矩阵(注意Matlab存储为转置形式,需转置)
K = cameraParams.IntrinsicMatrix'; % 3x3矩阵
fx = K(1,1);
fy = K(2,2);
cx = K(1,3);
cy = K(2,3);
% 安装参数(单位:米)
H = 0.3; % 相机高度 300mm
D = 0.07; % 前向偏置 70mm3.2 定义坐标转换函数(包含畸变校正)
,应先使用 undistortPoints 校正像素坐标。
matlab
function [Xv, Zv] = pixel2vehicle_vertical(u, v, cameraParams, H, D)
% 垂直俯视情况下的像素坐标转车辆坐标
% 输入:u, v 可以是标量或向量
% 输出:Xv, Zv 单位:米
% 第一步:畸变校正(使用Matlab内置函数)
points = [u(:), v(:)];
undistortedPoints = undistortPoints(points, cameraParams);
u_undist = undistortedPoints(:,1);
v_undist = undistortedPoints(:,2);
% 第二步:提取内参
K = cameraParams.IntrinsicMatrix';
fx = K(1,1);
fy = K(2,2);
cx = K(1,3);
cy = K(2,3);
% 第三步:计算纵向距离 Zv
Zv = (fy * H) ./ (v_undist - cy) + D;
% 第四步:计算横向坐标 Xv
Xv = (u_undist - cx) / fx .* (Zv - D);
% 恢复原始形状
Xv = reshape(Xv, size(u));
Zv = reshape(Zv, size(u));
end3.3 应用示例:计算车道中心横向偏差
matlab
% 假设已检测到左右车道线在图像底部的交点像素坐标
u_left = 180; % 左侧车道线底部u坐标
u_right = 500; % 右侧车道线底部u坐标
v_bottom = 440; % 图像底部v坐标(靠近车头)
% 转换为车辆坐标
[X_left, Z_left] = pixel2vehicle_vertical(u_left, v_bottom, cameraParams, H, D);
[X_right, Z_right] = pixel2vehicle_vertical(u_right, v_bottom, cameraParams, H, D);
% 车道中心横向位置
lane_center_X = (X_left + X_right) / 2;
% 横向偏差 e(车辆中心位于 X=0)
e = lane_center_X;
fprintf('左车道线位置:X=%.3f m, Z=%.3f m\n', X_left, Z_left);
fprintf('右车道线位置:X=%.3f m, Z=%.3f m\n', X_right, Z_right);
fprintf('车道中心横向偏差 e = %.3f m\n', e);四、与教学中PDF中通用方法的对比说明
| 项目 | PDF通用方法(θ ≠ 0) | 教学小车专用方法(θ = 0) |
|---|---|---|
| 外参获取 | 需标定或测量俯仰/偏航/滚转角 | 无需外参,旋转矩阵为单位阵 |
| Yc 已知条件 | Yc = H(地面在相机下方) | 同左,且所有地面点 Yc 恒为 H |
| 求解复杂度 | 需联立两个方程解 Zc 和 Xc | 直接由 v 坐标线性解出 Zv |
| 畸变校正 | 使用 undistortPoints |
同左 |
| 控制器输入 | 由4个点计算 D 和 θ(见PPT第12页) | 直接得到横向偏差 e,配合简单Stanley控制 |
向学生强调:
PDF中给出的控制器公式
steer = -k1*θ - k2*D是针对一般斜俯视情况的。在我们的垂直俯视实验中,航向角 θ 可以通过左右车道线的斜率差计算,但由于视野小、速度低,也可以只用横向偏差 e 进行比例控制 ,即steer = -k2 * e,配合 Stanley 的atan(k*e/v)项即可。
五、完整的实验流程总结
-
相机标定(PDF Camera Calibration部分):
-
打印棋盘格,拍摄10-20张不同角度的照片。
-
使用Matlab Camera Calibrator工具箱获得
cameraParams。
-
-
图像采集:
-
垂直安装相机于小车前轮轴心上方。
-
实时采集视频帧。
-
-
车道线检测(PDF Feature Extraction部分):
- 灰度化 → Canny边缘检测 → ROI掩膜 → Hough直线检测 → 左右线分离与拟合。
-
坐标转换(本文档方法):
-
选取检测到的车道线在图像底部的两个点(近点)。
-
调用
pixel2vehicle_vertical函数转换为车辆坐标系的 X, Z。
-
-
控制量计算:
-
横向偏差
e = (X_left + X_right)/2。 -
可选航向误差
θ = atan2(Z_right - Z_left, X_right - X_left) - pi/2 -
代入Stanley控制器输出转向角。
-
-
执行控制:
- 通过串口发送PWM信号给Arduino舵机(实验小车是arduino的板子)。
六、常见问题与调试技巧
Q1:为什么计算出的Zv与实际距离对不上?
A1:检查三个数值:
-
焦距
f是否正确(需标定,不能随意填写)。 -
相机高度
H是否准确测量(用尺子量光心到地面的垂直距离)。 -
图像主点
cy是否准确(标定给出)。可用已知距离(如1米处放物体)反推验证。
Q2:图像边缘处的偏差计算误差较大,为什么?
A2:尽管垂直安装避免了透视变形,但镜头畸变 在边缘处依然显著。务必使用 undistortPoints 进行校正(如代码中所示)。若未校正,桶形畸变会使边缘的物体看起来比实际更靠近中心。
Q3:能否不经过坐标转换,直接在图像上控制?
A3:可以,但不鲁棒。因为小车若发生俯仰振动,图像中车道线位置会大幅变化。经过坐标转换后,横向偏差以米为单位,对振动不敏感(高度H变化的影响是线性的)。