在工业自动化领域,协作机器人要实现精准的视觉引导作业,手眼标定是不可或缺的关键步骤。简单来说,手眼标定就是让机器人"看见"并"理解"周围环境的过程,它建立起机器人末端执行器与视觉系统之间的精确坐标转换关系。没有准确的手眼标定,机器人视觉系统就如同"睁眼瞎",无法将看到的图像信息转化为精确的动作指令。
手眼标定的两种核心配置
手眼标定主要分为 Eye-in-Hand(手眼) 和 Eye-to-Hand(眼在手外) 两种配置模式,它们各自适用于不同的应用场景,工作原理也有所区别。
Eye-in-Hand(手眼)配置
在这种配置下,相机直接安装在机器人的末端执行器上,随着机器人一起运动。想象一下,就像我们人类拿着相机四处拍摄一样,机器人的"眼睛"(相机)随着"手"(末端执行器)的移动而移动。
特点:
- 相机视野随机器人运动而改变,能够灵活地跟随机器人的工作轨迹进行观察。
- 特别适用于需要对移动目标进行检测、识别和引导的任务,例如抓取传送带上的物品、装配线上的精密部件定位等。
标定目标 :求解相机坐标系(Cam)到机器人末端工具坐标系(Tool或Flange)的固定变换矩阵 T_tool_cam。这个矩阵描述了相机相对于机器人末端执行器的精确位置和姿态关系。
Eye-to-Hand(眼在手外)配置
与Eye-in-Hand不同,Eye-to-Hand配置中的相机固定在一个独立的位置,不随机器人运动,通常是俯瞰整个工作场景。这就好比在工厂的天花板上安装了一个监控摄像头,持续监控着下方机器人的整个工作区域。

特点:
- 相机视野固定,能够对固定工作区域内的多个目标进行持续观测和作业规划。
- 适合于对整个工作站进行全局监控,或者对多个机器人的协同作业进行引导,例如在一个分拣工作站中,固定相机识别不同种类的物品后,引导机器人进行分类抓取。
标定目标 :求解相机坐标系(Cam)到机器人基坐标系(Base)的固定变换矩阵 T_base_cam。这个矩阵定义了相机相对于机器人基座的空间位置关系。
手眼标定的数学原理:解开AX=XB的谜题
手眼标定的核心在于求解一个 4x4的齐次变换矩阵,这个矩阵包含了3维空间中的旋转和平移信息,它就像是连接机器人"手"和"眼"的密码本。
核心方程:AX = XB
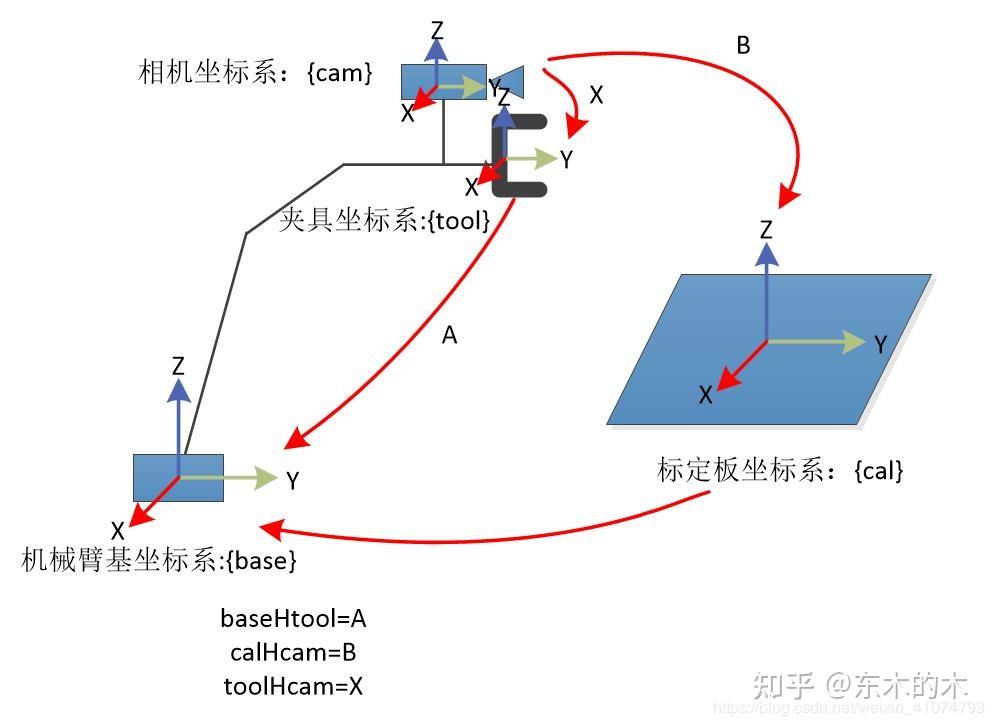
无论是哪种配置,标定过程都基于一个关键的观察:机器人末端相对于基坐标系的运动,与相机观察到的标定板相对于相机坐标系的运动,应该构成一个闭合的运动链。
对于两个不同的机器人位姿 i 和 j ,我们可以推导出经典的手眼标定方程:AX = XB
其中:
- A :机器人末端从位姿 i 运动到位姿 j 的变换矩阵。这个矩阵可以直接从机器人控制器中精确读取,它描述了机器人自身的运动。
- B :相机从位姿 i 运动到位姿 j 的变换矩阵。这个矩阵通过相机拍摄标定板图像,再经过图像处理算法解算得出,它反映了相机观察到的标定板运动。
- X :我们要求解的"手"与"眼"之间的变换矩阵,对于Eye-in-Hand是 T_tool_cam ,对于Eye-to-Hand是 T_base_cam。
通过采集多组(通常需要 15-25组 )不同的机器人位姿及其对应的相机图像,我们就可以构建多个AX=XB方程,然后使用成熟的算法(如Tsai-Lenz算法、Park-Martin算法等)求解出最优的X矩阵。这个过程就像是通过多组"密码"来破解最终的"密钥"。
标定前的准备工作:工欲善其事,必先利其器
在开始标定之前,充分的准备工作是确保标定精度的基础。这包括硬件的选型、软件的配置以及环境的检查。
硬件要求
进行手眼标定,你需要准备以下硬件:
- 协作机器人 :如UR(Universal Robots)、Franka Emika、AUBO等主流品牌的协作机器人。机器人本身的重复定位精度对最终标定结果有直接影响。
- 相机 :通常为2D工业相机(如Basler、Point Grey)或3D结构光/激光相机(如Intel RealSense、Microsoft Kinect、Ensenso)。选择时需考虑分辨率、帧率、视野范围以及是否需要深度信息。
- 标定板 :常用的有棋盘格标定板、圆点阵列标定板、CharuCo板等。强烈推荐使用高精度的陶瓷或玻璃基板标定板,它们具有更好的平整度和稳定性,能够提供更精确的特征点。
- 计算设备:一台性能足够的工控机或PC,用于运行标定软件和处理图像数据。
- 稳定的光源:避免环境光的干扰,确保标定板成像清晰、对比度适中。可以使用环形光源、条形光源等工业照明设备。
软件要求
相应的软件配置也必不可少:
- 机器人操作系统/控制软件:如ROS(Robot Operating System),或机器人厂商提供的专用控制软件(如URCap for UR机器人)。
- 相机驱动及图像采集软件:确保相机能够正常工作并采集图像,如Point Grey的FlyCapture SDK。
- 手眼标定软件包:可以使用开源库如OpenCV中的 calibrateHandEye 函数、Halcon的 calibrate_hand_eye 算子,或者机器人/相机厂商提供的专用标定工具(如Robotiq的CalibKit)。
环境与安装检查
在正式开始标定前,务必进行以下环境与安装检查:
- 安装牢固:确保相机和标定板都安装得非常稳固,没有任何松动或晃动。哪怕是微小的震动都可能导致标定结果出现较大误差。
- 视野清晰:在整个机器人运动范围内,标定板必须始终完整地出现在相机视野内,并且成像清晰,避免过度曝光、欠曝光或阴影。可以通过调整光源角度和强度来优化成像质量。
- 运动空间安全:仔细规划机器人的标定运动轨迹,确保在运动过程中不会发生碰撞,保护人员和设备安全。特别是在Eye-in-Hand配置下,相机随机器人运动,其运动范围可能更大。
标定操作流程(以Eye-in-Hand为例)
下面,我们以应用更为广泛的Eye-in-Hand配置为例,详细介绍手眼标定的具体操作步骤。
步骤 1:安装固定
首先,将相机牢固地安装在机器人末端法兰上。这里需要注意,安装接口必须刚性连接,避免相机在机器人运动时产生相对晃动。可以使用专用的转接板或夹具来确保安装精度。
然后,将标定板牢固地放置在工作台面上。在整个标定过程中,标定板的位置必须绝对固定,任何微小的移动都会导致标定失败。可以使用螺栓或强力夹具将标定板固定在工作台上。
步骤 2:工具坐标系定义
在机器人控制器中,精确定义末端工具坐标系(Tool Center Point, TCP)。TCP是机器人运动控制的基准点。
如果末端执行器上只有相机,通常将TCP定义在相机光心或法兰中心。定义TCP的过程需要非常精确,可以通过机器人自带的TCP标定功能(如四点法、六点法)来完成。一个不准确的TCP定义会直接影响后续的标定精度。
步骤 3:数据采集
数据采集是标定过程中最为关键的一步,采集的数据质量直接决定了标定结果的准确性。
- 规划位姿 :控制机器人移动到多个(建议 ≥15个)不同的位姿。这些位姿的选择需要遵循以下原则:
- 多样性:位姿应包含较大的旋转(绕X/Y/Z轴)和平移变化。例如,让机器人末端在不同高度、不同角度下观察标定板。
- 显著性:每个位姿下,标定板在图像中的姿态应有明显差异。避免连续位姿之间变化过小。
- 准确性:确保机器人移动平稳、精确到位。
- 采集数据对:在每个机器人位姿下,需要同步采集以下数据:
- 从机器人控制器读取当前末端工具坐标系相对于机器人基坐标系的位姿 T_base_tool。
- 触发相机拍摄一张包含完整标定板的图像。
- 通过图像处理算法(如OpenCV的findChessboardCorners)识别标定板,并计算出标定板坐标系相对于相机坐标系的位姿 T_cam_marker。
- 将这一对(机器人位姿 T_base_tool ,相机位姿 T_cam_marker)数据保存下来。
步骤 4:计算标定结果
将采集到的所有数据对输入到手眼标定算法中。以OpenCV为例,可以调用其 cv2.calibrateHandEye 函数。算法会自动解算出手眼变换矩阵 T_tool_cam。
这个函数通常提供多种求解方法(如Tsai、Park、Horaud等),你可以根据实际情况选择合适的方法。不同的算法在收敛速度和精度上可能会有细微差异。
步骤 5:验证标定精度
标定完成后,绝对不能直接将结果投入应用,必须进行严格的精度验证。
- 固定点验证 :控制机器人移动到一个新的、未参与标定的位姿,让相机观察标定板。利用求得的 T_tool_cam,通过视觉计算出标定板上某个特定点(例如中心点)在机器人基坐标系下的位置,然后指挥机器人末端移动到该点,测量实际到达位置与理论位置的偏差。
- 移动点验证:指挥机器人末端依次移动到标定板上的多个不同物理点,比较机器人示教器上显示的位置与通过视觉计算出的理论位置的误差。
- 评估误差 :计算这些误差的平均值和标准差。通常工业应用中要求平移误差小于 1mm ,旋转误差小于 0.1度(具体精度要求需根据实际应用场景确定)。如果误差不满足要求,需要检查数据采集过程(如位姿多样性是否足够、标定板是否有移动、图像识别是否准确等),并重新进行标定。
常见问题与解决方案
在手眼标定过程中,我们常常会遇到各种问题,导致标定结果不理想。以下是一些常见问题及其解决方案:
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| 标定误差大 | 1. 数据位姿变化不充分(如只平移,少旋转) 2. 机器人自身定位精度差 3. 标定板图像识别不准 4. 机械振动或安装不牢 | 1. 增加位姿多样性,特别是大角度旋转和平移范围 2. 检查机器人重复定位精度,必要时进行机器人校准 3. 优化图像处理算法,确保标定板角点/圆心提取准确,调整光源 4. 紧固所有安装件,消除振动源 |
| 算法无法收敛 | 1. 机器人位姿与相机位姿数据不匹配(如顺序错乱) 2. 采集的位姿数量太少 3. 标定板在部分图像中未被正确识别 | 1. 仔细检查数据配对是否正确,确保每对数据对应同一机器人位姿 2. 增加采集位姿数量(建议≥20组) 3. 剔除识别失败的数据点,或重新采集该位姿图像 |
| 验证时出现系统性偏差 | 1. 工具坐标系(TCP)定义错误 2. 标定板尺寸输入错误 | 1. 重新精确标定机器人TCP 2. 仔细核对标定板参数(格子尺寸、点间距等),确保输入无误 |
注意事项与最佳实践
要获得高精度、高可靠性的手眼标定结果,除了遵循上述步骤外,还需要注意以下几点最佳实践:
精度溯源
手眼标定的最终精度是 机器人精度、相机标定精度、标定板制造精度和图像处理精度 的综合结果。这就像一条链条,其中任何一个环节的精度不足都会影响整体性能。因此,在追求手眼标定精度的同时,也要关注各个组成部分的自身精度。例如,相机本身需要先进行精确的内参标定(消除畸变),标定板应选用高精度的陶瓷或玻璃基板。
环境因素影响
- 温度影响:对于高精度应用(如微电子封装、精密装配),环境温度的变化会导致机器人和相机结构产生热膨胀或收缩,从而影响标定精度。建议在恒温环境中进行标定和作业,或者在工作前对设备进行充分预热后再进行标定。
- 光照条件:光照的不稳定会影响图像质量和特征点识别精度。应使用稳定的光源,并避免环境光的剧烈变化。
定期复检与维护
- 定期复检:手眼标定不是一劳永逸的。在机器人发生碰撞、更换末端执行器、长时间运行或工作环境发生较大变化后,建议重新进行手眼标定以保持精度。可以根据实际应用情况制定定期复检计划,如每周或每月一次。
- 文档记录:详细记录每次标定的日期、操作人员、所用参数(如标定板类型、尺寸,算法选择)和最终精度评估结果。这些记录对于追溯问题、优化标定流程以及设备维护都非常有价值。
投资优质工具
一块高精度的标定板虽然成本较高,但对于保证标定精度至关重要,是非常值得的投资。廉价的塑料标定板容易变形,且印刷精度低。同样,选择性能稳定的工业相机和镜头也能减少很多后续的麻烦。
总结:连接感知与执行的桥梁
手眼标定是连接机器人感知系统(视觉)和执行系统(本体)的桥梁,是一项严谨的工程技术。它看似复杂,但只要理解其基本原理,遵循规范的操作流程,并注重每一个细节,就能够稳定可靠地获得高精度的标定结果。
通过精确的手眼标定,协作机器人才能真正"看懂"世界,并"灵活"地完成各种复杂任务,从而在工业自动化、智能制造、服务机器人等领域发挥出巨大的潜力。希望本文能够帮助你全面掌握手眼标定技术,为你的机器人项目保驾护航。
免责声明:本文档为通用技术指导,具体操作请务必参考您所使用的机器人、相机及软件的具体手册和安全规范。操作机器人时请注意安全。