camera 和LCD的HSYNC,VSYNC的区别
这个问题问得很好,本质是同样叫 VSYNC / HSYNC,但"方向"和"语义"完全不同。你从嵌入式软件工程师角度理解,可以抓住一句话:
图像传感器:输出时序(生产数据)
LCD RGB屏:输入时序(消费数据)
下面给你做一个工程视角的宏观拆解。
一、核心对比(一句话抓本质)
| 模块 | 角色 | VSYNC/HSYNC本质 |
|---|---|---|
| 图像传感器(Camera) | 数据源 | 告诉MCU:"我正在输出哪一帧/哪一行" |
| LCD RGB屏 | 数据接收端 | 告诉MCU:"你该在什么时候给我哪一帧/哪一行" |
👉 一个是我发给你(带节奏)
👉 一个是你喂给我(按我节奏)
二、图像传感器(Camera)的 VSYNC / HSYNC
1️⃣ 信号方向
👉 传感器 → MCU / ISP
2️⃣ 信号作用
-
VSYNC(Frame Sync)
- 一帧开始 / 结束标志
- 表示新的一帧图像来了
-
HSYNC(Line Sync)
- 一行像素开始 / 结束
- 用于行对齐
-
PCLK(像素时钟)
- 每个像素什么时候采样
3️⃣ 软件工程视角
你在写驱动时,本质是在做:
c
while (VSYNC == 0); // 等待帧开始
for (每一行) {
while (HSYNC == 0); // 等待行开始
for (每个像素) {
pixel = read(PCLK);
}
}👉 关键词:
- 采集(Capture)
- 被动接收
- 跟随外设节奏
三、LCD RGB屏 的 VSYNC / HSYNC
1️⃣ 信号方向
👉 MCU / RGB控制器 → LCD
2️⃣ 信号作用
-
VSYNC
- 通知屏幕:新的一帧开始显示
-
HSYNC
- 通知屏幕:新的一行开始显示
-
PCLK
- 每个像素何时被锁存
-
DE(Data Enable)
- 哪些像素是有效数据
3️⃣ 软件工程视角
你在做的是:
c
while (1) {
// VSYNC周期
send_frame_start();
for (每一行) {
send_hsync();
send_pixels(line_data);
}
}👉 关键词:
- 驱动显示(Drive)
- 主动输出
- 你必须严格生成时序
四、本质区别(非常关键)
1️⃣ 控制权不同
| 项目 | Camera | LCD |
|---|---|---|
| 谁控制节奏 | 传感器 | MCU / LCD控制器 |
| MCU角色 | 被动采集 | 主动输出 |
2️⃣ 数据流方向
Camera:
像素 → MCU
LCD:
MCU → 像素👉 完全反过来
3️⃣ 时序容忍度
| 项目 | Camera | LCD |
|---|---|---|
| 时序错一点 | 丢帧/错行 | 直接花屏 |
| 是否可缓存 | 可以(FIFO/DMA) | 通常实时要求严格 |
4️⃣ 工程实现差异(重点)
Camera(输入接口)
- DVP / MIPI CSI
- DMA + 中断
- 行/帧同步捕获
👉 你关心:
- 数据有没有丢
- 帧有没有对齐
LCD(输出接口)
- RGB并口 / SPI / MIPI DSI
- 时序寄存器配置(porch、sync宽度)
- 刷新率(60Hz等)
👉 你关心:
- 时序参数是否匹配屏
- PCLK是否正确
- 是否花屏/撕裂
五、一个形象比喻(很好记)
📷 图像传感器(Camera)
像摄像头对你说:
"我现在开始拍一帧了(VSYNC)
现在是第一行(HSYNC)
像素来了你赶紧接!"
👉 你只能跟着它节奏走
📺 LCD屏
像屏幕对你说:
"现在该显示新一帧了(VSYNC)
现在给我第1行(HSYNC)
每个像素按时送过来!"
👉 你必须按它要求喂数据
六、嵌入式开发中的坑(你肯定会遇到)
1️⃣ Camera常见坑
- VSYNC极性搞反 → 帧错乱
- HSYNC错 → 行错位
- PCLK边沿错 → 数据错位
2️⃣ LCD常见坑
- porch参数错 → 图像偏移
- PCLK不匹配 → 花屏
- VSYNC/HSYNC极性错 → 不显示
七、总结(工程一句话版)
👉 Camera 的 VSYNC/HSYNC = "我在输出数据,请你按我节奏接"
👉 LCD 的 VSYNC/HSYNC = "我要显示数据,你必须按我节奏送"
如果你愿意,我可以帮你结合 ESP32-S3 RGB LCD + Camera(DVP) 给你画一个完整的数据链路(采集→缓存→显示),这个在你做电子相册/图像项目时会非常有用。
补充
你这个理解已经接近对了,但有一个关键点需要纠正 :
👉 Camera 和 LCD 的 VSYNC/HSYNC 都不是"你去检测然后决定干嘛"这么简单,而是"谁主导时序"的问题。
我帮你按工程逻辑给你"掰正一下",保证你以后写驱动不踩坑。
一、先直接给结论(纠正你的描述)
你说的是:
Camera 收到 VSYNC → 开始获取一帧
LCD 检测 HSYNC → 写一行 → 检测 VSYNC → 结束
👉 这里有两个误区:
❌ 误区1:Camera"收到"VSYNC
→ 实际是:Camera"产生"VSYNC
❌ 误区2:LCD"检测"VSYNC/HSYNC来决定写数据
→ 实际是:LCD不检测,是你(MCU)在产生这些信号
二、正确的工程模型(非常重要)
1️⃣ Camera(图像传感器)
👉 正确理解:
Camera输出 VSYNC/HSYNC,你去"捕获"
实际流程:
c
// 被动模式(典型DVP)
等待 VSYNC 上升沿 → 一帧开始
for (每一行) {
等待 HSYNC
按 PCLK 采样像素
}👉 重点:
- VSYNC/HSYNC 是 输入信号
- 你是 监听 + 采集
- 你不能控制它
2️⃣ LCD(RGB接口屏)
👉 正确理解:
不是你"检测",而是你在"生成"VSYNC/HSYNC去驱动LCD
实际流程(硬件自动做的):
c
LCD控制器(比如ESP32-S3 RGB外设):
自动循环:
拉VSYNC → 帧开始
for (每一行) {
拉HSYNC
输出一行像素数据
}👉 重点:
- VSYNC/HSYNC 是 输出信号
- 你是 配置时序参数
- 硬件帮你自动跑
三、把你的话"改成完全正确版本"
你原话改成工程正确版是:
✔ Camera:
当检测到 VSYNC(来自传感器)时,MCU开始采集一帧数据;
在每个 HSYNC 到来时,按 PCLK 采集一行像素数据
✔ LCD:
MCU(或LCD控制器)主动产生 VSYNC 表示一帧开始;
在每个 HSYNC 周期内,输出一行像素数据给LCD;
整个过程是持续循环的,而不是靠检测VSYNC结束
四、一个关键认知(很多人卡在这)
❗ LCD不是"写完一帧就停"
你说:
"检测 VSYNC set了就结束写入"
👉 这是不对的,LCD是:
c
while (1) {
一帧一帧不停刷新(60Hz)
}👉 否则会:
- 黑屏
- 闪屏
- 撕裂
五、再给你一个工程级对比(非常实用)
| 项目 | Camera | LCD |
|---|---|---|
| VSYNC/HSYNC | 输入 | 输出 |
| 你做什么 | 捕获 | 生成 |
| 控制权 | 外设 | MCU |
| 是否循环 | 外设决定 | 你必须持续输出 |
| 驱动方式 | 中断 / DMA | 时序配置 + DMA |
六、结合你ESP32-S3的实际情况(重点)
你现在这种项目(电子相册 / RGB屏):
LCD侧(ESP32-S3)
-
用
esp_lcd_rgb_panel -
配:
- hsync_back_porch
- hsync_front_porch
- vsync_pulse_width
- pclk
👉 然后:
👉 硬件自动生成 VSYNC/HSYNC,你不用管"检测"
Camera侧(如果你接DVP)
- 用 I2S camera模式
- DMA采集
- VSYNC/HSYNC作为同步信号
七、一句话帮你彻底记住
👉 Camera:我给你节奏,你来接数据
👉 LCD:我不给你节奏,你必须给我节奏
八、如果你想再深入(建议)
你下一步可以搞清楚这两个高级点(对你项目很关键):
- porch(前后肩)到底是啥
- DE模式 vs HSYNC/VSYNC模式
- 双缓冲(避免撕裂)
如果你愿意,我可以帮你画一张
👉 ESP32-S3:Camera → DMA → FrameBuffer → RGB LCD 的完整数据链路图
这个对你做电子相册/视频显示是"开窍级"的理解。
ESP32 RGB LCD外设工作原理介绍
好,这一块我给你从嵌入式工程实战视角 讲清楚,直接对标你现在做的 ESP32-S3 + RGB LCD(LVGL/电子相册)。
一、先给你一个整体工作模型(核心)
ESP32 RGB LCD 外设本质
👉 可以把它理解成一个:
"带时序发生器 + DMA 的持续视频输出引擎"
它做三件事:
- 生成时序(VSYNC / HSYNC / PCLK / DE)
- 从内存(FrameBuffer)读像素数据
- 按时序把像素送到LCD
二、完整数据流(你必须脑子里有这个图)
FrameBuffer(内存)
↓
DMA搬运
↓
ESP32 RGB LCD外设
↓
VSYNC / HSYNC / PCLK
↓
LCD屏👉 关键点:
- 数据源:内存
- 节奏:LCD外设控制
- 输出:持续不断(像视频流)
三、RGB LCD外设内部是怎么跑的
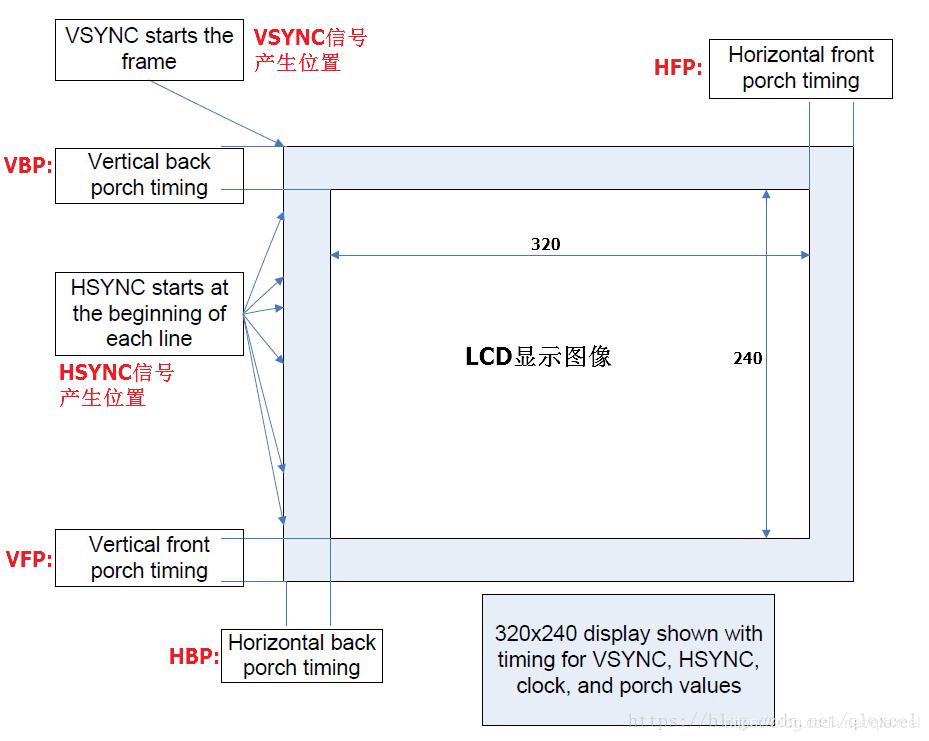
1️⃣ 时序发生器(核心中的核心)
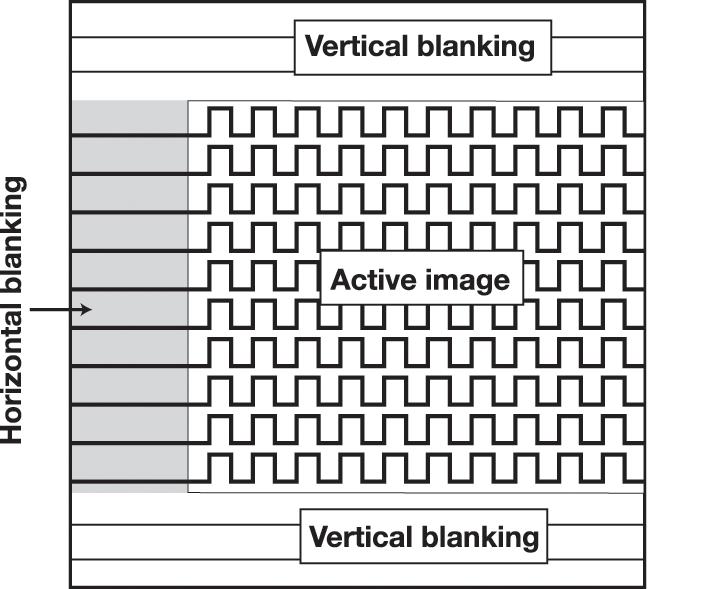
它内部有一套"计数器":
水平方向(行)
|<-- back porch -->|<-- 有效像素 -->|<-- front porch -->|
↑ ↑ ↑
HSYNC 显示区 空白区垂直方向(帧)
VSYNC
↓
back porch
↓
有效行
↓
front porch👉 本质是:
c
for (每一帧) {
产生 VSYNC
for (每一行) {
产生 HSYNC
输出像素数据
}
}⚠️ 这些全部是 硬件自动跑的
2️⃣ DMA(持续喂数据)
RGB外设会:
c
while (1) {
从 framebuffer 读数据
按 PCLK 一像素一像素送出去
}👉 注意:
- 不走CPU(否则早炸了)
- 必须用 DMA
3️⃣ PCLK(像素节拍器)
👉 每一个 PCLK:
输出一个像素(RGB565 / RGB888)👉 所以:
带宽 = 分辨率 × 刷新率 × 像素位宽四、你必须理解的几个关键参数
1️⃣ 分辨率 ≠ 实际时序
比如:
480 × 272但真实输出是:
(480 + porch) × (272 + porch)👉 所以:
👉 PCLK要按"总像素"算,不是有效像素
2️⃣ porch(90%的人一开始都会踩坑)
水平:
- hsync_pulse_width
- hsync_back_porch
- hsync_front_porch
垂直:
- vsync_pulse_width
- vsync_back_porch
- vsync_front_porch
👉 作用:
给LCD内部扫描电路"缓冲时间"
👉 配错会:
- 图像偏移
- 不显示
- 抖动
3️⃣ DE(Data Enable)
两种模式:
✔ DE模式(推荐)
- DE=1 → 有效像素
- DE=0 → 空白
👉 LCD更容易驱动
✔ SYNC模式(VSYNC+HSYNC)
- 靠sync信号判断位置
👉 更底层
五、ESP32-S3实际工作方式(你会用到)
用 esp_lcd_rgb_panel 时:
你做的事情:
c
esp_lcd_rgb_panel_config_t config = {
.timings = {
.pclk_hz = 10MHz,
.h_res = 480,
.v_res = 272,
.hsync_back_porch = xx,
.hsync_front_porch = xx,
.vsync_back_porch = xx,
.vsync_front_porch = xx,
},
};👉 你只是在:
"告诉硬件:你按这个节奏跑"
然后发生的事情(自动)
- 硬件生成 VSYNC/HSYNC
- DMA搬 framebuffer
- LCD被持续刷新(60Hz)
六、工程中最容易炸的点(重点)
❗1️⃣ PCLK算错 → 直接花屏
计算方式:
PCLK ≈ (Htotal × Vtotal × FPS)👉 Htotal = 有效 + porch
👉 Vtotal = 有效 + porch
❗2️⃣ 带宽不够 → 撕裂 / 卡顿
举例:
480×272 × 2字节 × 60Hz ≈ 15MB/s👉 再加porch → 更高
⚠️ ESP32内存带宽有限!
❗3️⃣ FrameBuffer位置
必须注意:
- 放在 SRAM(内部RAM)优先
- PSRAM会慢(可能撕裂)
❗4️⃣ 单缓冲 vs 双缓冲
单缓冲
- 你在写,LCD在读
👉 会撕裂
双缓冲(推荐)
Buffer A → 显示
Buffer B → 渲染
交换👉 LVGL就是这么干的
❗5️⃣ VSYNC同步(防撕裂关键)
很多人忽略:
👉 应该在VSYNC时切buffer
否则:
- 半帧切换
- 画面断裂
七、把Camera + LCD串起来(你未来会用)
Camera → DMA → FrameBuffer → RGB LCD → 屏幕👉 难点:
- 分辨率对齐
- 格式转换(YUV → RGB)
- 帧率匹配
八、最后给你一个"工程级总结"
👉 ESP32 RGB LCD外设本质:
一个按固定时序,从内存读取像素并持续输出到LCD的硬件视频流引擎
👉 你要做的只有三件事:
- 配对时序(porch + 分辨率 + PCLK)
- 保证内存带宽够
- 处理好双缓冲避免撕裂
九、一句话帮你彻底吃透
👉 LCD不是"你想什么时候写就写"
👉 而是:硬件一直在读,你必须保证"随时有数据给它"
如果你下一步想深入,我可以帮你拆:
👉 ESP32-S3 RGB LCD + LVGL 的完整优化方案(避免卡顿/撕裂)
👉 或者 PCLK / 带宽怎么算才不会炸(结合你实际屏)
这个会直接影响你项目成败。
好,这个 porch(前后肩) 是很多人第一次做 RGB LCD 最容易懵的点,我给你用工程+直觉方式讲清楚,你一下就通了。
一、先一句话理解 porch
👉 porch = "无效显示时间(空白时间)"
也可以理解为:
LCD在每一行/每一帧之间的"休息时间"
二、先看一行数据是怎么传的(重点)
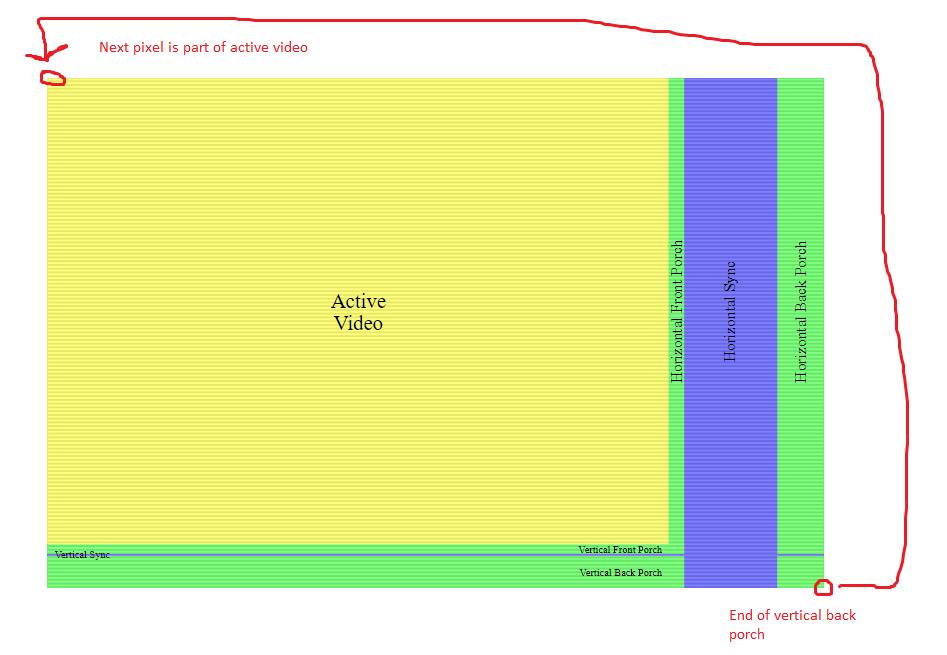
一行完整的时序其实是这样:
text
[HSYNC] → [Back Porch] → [有效像素] → [Front Porch]三、逐个给你讲清楚(非常关键)
1️⃣ HSYNC(行同步脉冲)
👉 类似:
"喂!LCD,现在新的一行要开始了!"
2️⃣ Back Porch(后沿/后肩)
👉 紧跟在 HSYNC 后面的一段空白时间
作用:
给LCD一点准备时间,从"同步状态"切换到"显示状态"
3️⃣ 有效像素区(你真正显示的内容)
text
比如 480 像素 → 这一段才是图像👉 只有这段数据会显示在屏幕上
4️⃣ Front Porch(前沿/前肩)
👉 一行结束后,再留一段空白时间
作用:
让LCD有时间"收尾",准备下一行
四、为什么必须要有 porch?(核心理解)
👉 LCD不是瞬间切换的,它是"扫描电路":
text
一行扫完 → 回到下一行👉 porch 就是:
- 电子电路稳定时间
- 扫描回扫时间(类似CRT历史遗留)
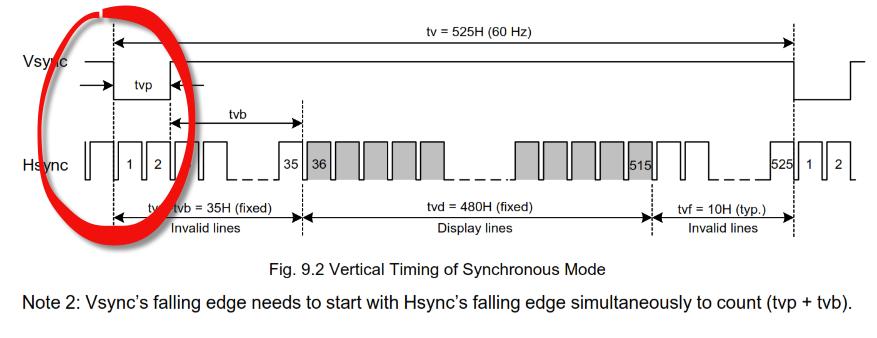
五、垂直方向也是一样(帧级别)
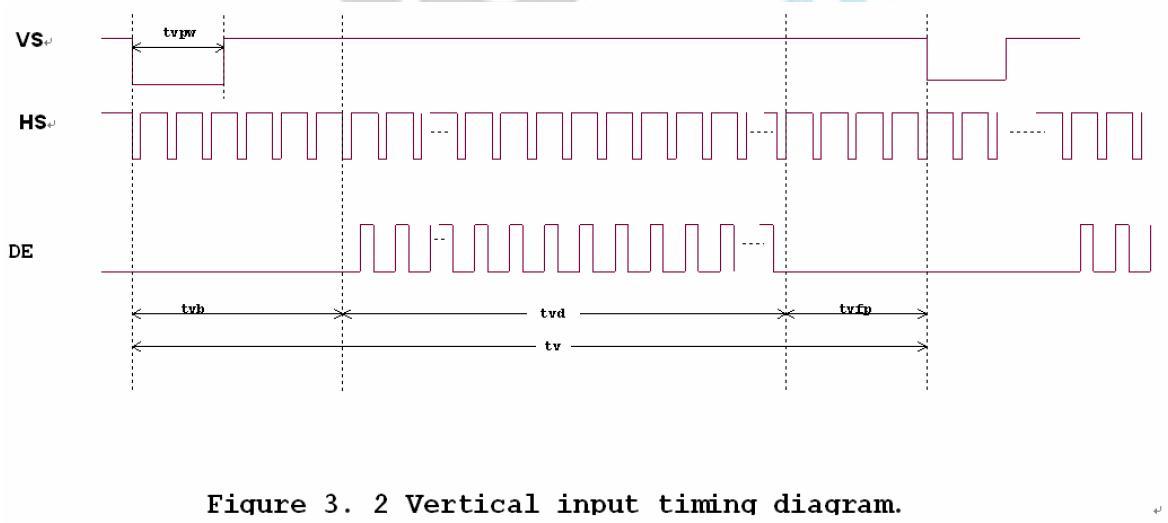
一帧结构:
text
VSYNC → Back Porch → 有效行 → Front Porch六、举个真实例子(你最容易理解)
假设你的屏:
text
分辨率:480 × 272但真实输出是:
text
水平:
HSYNC + BP(40) + 480 + FP(20)
垂直:
VSYNC + BP(8) + 272 + FP(4)👉 实际发送的像素数量:
text
总宽度 = 480 + 40 + 20 + sync
总高度 = 272 + 8 + 4 + sync👉 这就是为什么:
PCLK一定要按"总分辨率"算!
七、你可以这样形象理解(非常好记)
📺 LCD像一个人读书
text
HSYNC:翻到新一行
Back Porch:眼睛对焦
有效像素:认真读内容
Front Porch:读完缓一下八、工程上最重要的影响(你必须知道)
❗1️⃣ porch配错 → 图像偏移
- 左移 / 右移
- 上移 / 下移
❗2️⃣ porch太小 → 不稳定
- 抖动
- 花屏
- 不显示
❗3️⃣ porch太大 → 帧率下降
👉 因为总像素变多了
九、ESP32里你是怎么用的
c
.timings = {
.h_res = 480,
.v_res = 272,
.hsync_back_porch = 40,
.hsync_front_porch = 20,
.vsync_back_porch = 8,
.vsync_front_porch = 4,
}👉 本质:
告诉硬件:这些时间你不要显示,只是走时序
十、给你一个工程级总结(很关键)
👉 porch 本质就是:
"同步信号和有效数据之间的缓冲区"
十一、一句话彻底记住
👉 有效像素 = 你要显示的内容
👉 porch = LCD还没准备好 / 已经显示完的时间
十二、如果你要进阶(强烈建议)
下一步你可以搞:
- 如何根据屏规格书算 porch(超实用)
- PCLK怎么算才刚好60Hz
- 为什么有的屏必须DE模式
如果你把你现在用的那块屏型号发我,我可以帮你:
👉 把整套 porch + PCLK + 时序参数全部算好(直接能用)
👉 顺便帮你避免花屏/偏移问题