一、Agent 四层架构(主流工程范式)
智能体感知模块:

把智能体调度架构划分成四层:划分(Prompt 层、Context 层、Tool 层、Agent 层)在2025-2026年的Agent工程实践中是非常主流且准确的描述。
它本质上是对Agent "感知-推理-行动-协作" 四个核心智能特征的工程化映射,逻辑清晰、层次分明。
工程实践中,将智能体调度架构划分为四层是主流且合理的方式:

这个划分本质上是对Agentic Workflow的解耦:
- Prompt → 结构化输入输出与模版化生成,控制模型"怎么想"(behavior shaping)
- Context →动态上下窗口与RAG检索增强,提供"知道什么"(knowledge injection)
- Tool → MCP协议,让模型"能做什么"(action execution)
- Agent →规划、记忆以及多智能体,实现"整体怎么做"(orchestration & planning)

它比早期ReAct(单层Tool+Reason)或简单LangChain Agent更工程化,特别适合多轮、长任务、RAG+Tool混合场景。
二、ReAct 核心思想
一句话总结:
ReAct = 显式推理(Reasoning) + 工具调用(Acting)的交替循环
即:
Thought → Action → Observation → 循环核心代码:
用最简单的方式,用伪代码 / 简化的 Python 风格表示 Thought → Action → Observation 的循环结构:
python
# 极简版 ReAct 循环(伪代码风格)
while not task_is_done():
# 1. 思考(Reasoning)
thought = llm.generate_thought(
current_state = observation_history + current_observation,
task = original_task,
available_tools = tool_list
)
print("Thought:", thought)
# 2. 决定要做什么(Action)
action = llm.decide_action(
thought=thought,
allowed_format="use_tool" or "give_final_answer"
)
if action.type == "Final Answer":
return action.content # 任务结束,返回最终答案
# 3. 执行行动(调用工具)
print("Action:", action)
observation = execute_tool(action.tool_name, action.parameters)
print("Observation:", observation)
# 4. 把新观察加进历史,进入下一轮
observation_history.append({
"thought": thought,
"action": action,
"observation": observation
})
# 总结:ReAct 循环的本质就这四步反复执行
# Thought → Action → Observation → Thought → Action → ...ReAct 的循环本质就是:
- 先思考(Thought)→ 产生下一步计划
- 再决定行动(Action)→ 告诉系统我要调用哪个工具
- 系统执行后返回结果(Observation)→ 反馈给模型
- 回到第1步,用新的信息继续思考......
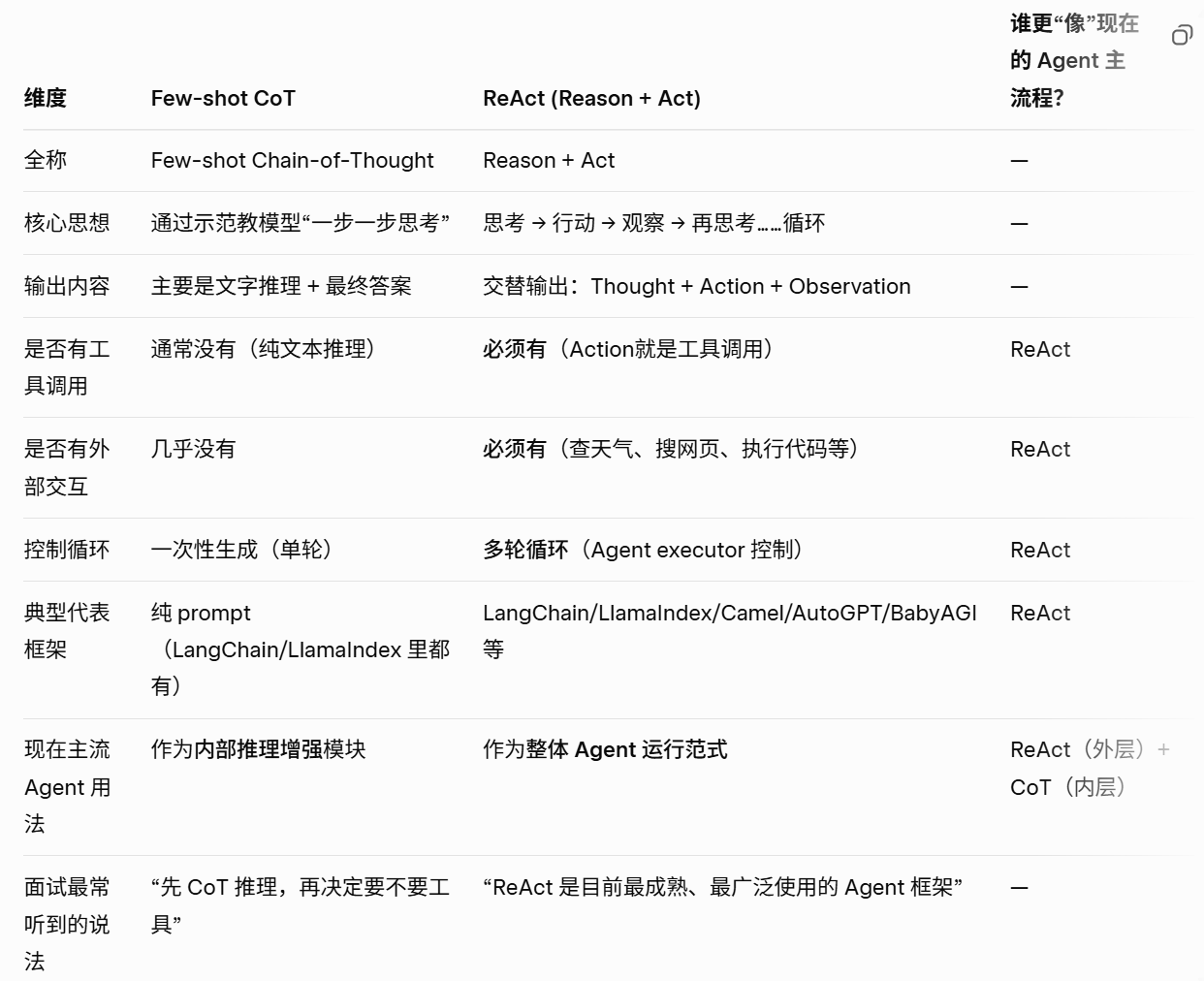
三、Few-shot CoT vs ReAct
1、本质区别
- CoT:只"思考"
- ReAct:边"思考"边"行动"
Few-shot CoT = Few-shot Prompting + Chain-of-Thought
• Few-shot:在prompt 里给模型看 2~8 个「输入-完整推理过程-答案」的示范样例
• Chain-of-Thought:让模型学会输出中间推理步骤(step by step),而不是直接跳到最终答案
四、多智能体调度
1、定义
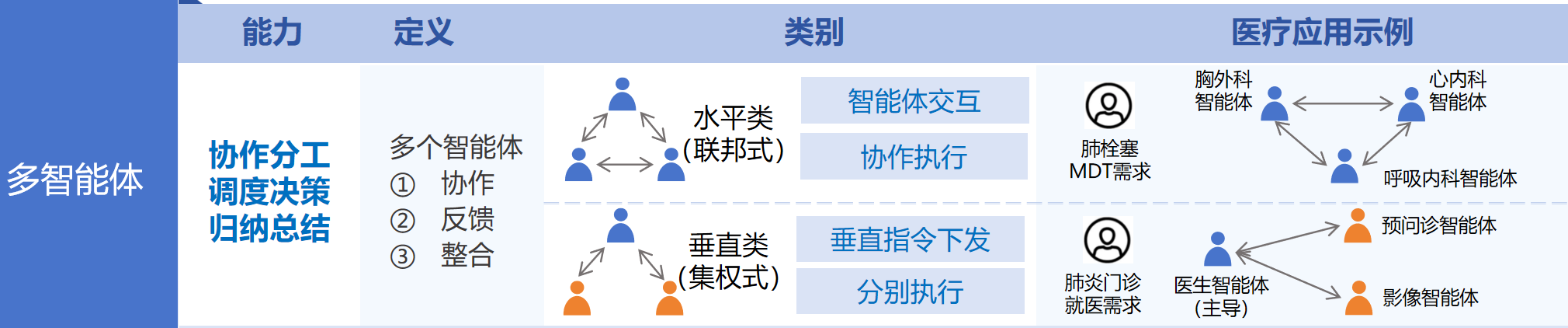
多智能体协作主要有两种模式:
- 一是水平式,通过"并行专家模式",通过多Agent同时处理同类任务,最后通过投票等方式获得结果,提高吞吐和鲁棒性,适合RAG、多候选生成等场景。
- 二是垂直式,垂直式协作是"流水线分工模式",通过多Agent分阶段完成复杂任务,适合长链路推理和Agentic Workflow。
真实场景中,绝大多数系统不是单一模式,而是:
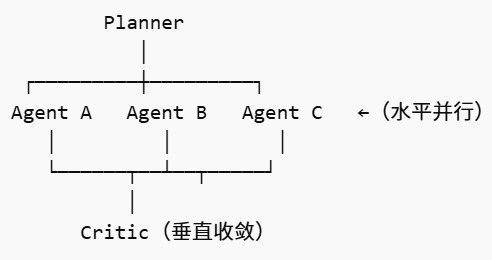
先垂直拆解 → 再水平扩展 → 最后垂直收敛
2、伪代码模块
整体框架:
每个 Agent 本质都是一个 ReAct loop
区别只是:
- Planner:只做任务拆解(偏 Reasoning)
- Worker:执行任务(Reason + Tool)
- Critic:评估/融合结果(Reason为主)
完整伪代码:
python
from concurrent.futures import ThreadPoolExecutor
# =========================================
# 通用 ReAct Agent(核心抽象)
# =========================================
class ReActAgent:
def __init__(self, llm, tools=None, role="worker", max_steps=5):
self.llm = llm
self.tools = tools or {}
self.role = role
self.max_steps = max_steps
def run(self, task, context=""):
history = []
observation = context
for step in range(self.max_steps):
prompt = self.build_prompt(task, history, observation)
response = self.llm(prompt)
# 1️⃣ 判断是否结束
if "Final Answer:" in response:
return self.extract_final(response)
# 2️⃣ 解析 Thought / Action
thought = self.extract_thought(response)
action = self.extract_action(response)
# 3️⃣ 执行工具(如果有)
if action and action["name"] in self.tools:
observation = self.tools[action["name"]](**action["args"])
else:
observation = "No tool used"
# 4️⃣ 记录轨迹
history.append({
"thought": thought,
"action": action,
"observation": observation
})
return "Max steps reached"
# ===== 以下为简化函数 =====
def build_prompt(self, task, history, observation):
return f"""
Role: {self.role}
Task: {task}
History: {history}
Observation: {observation}
Follow ReAct format:
Thought:
Action:
Observation:
Final Answer:
"""
def extract_thought(self, text): ...
def extract_action(self, text): ...
def extract_final(self, text): ...
# =========================================
# 1️⃣ 垂直拆解:Planner Agent
# =========================================
class PlannerAgent(ReActAgent):
def run(self, task):
prompt = f"""
You are a planner.
Break the task into independent subtasks.
Task: {task}
Return JSON list:
["subtask1", "subtask2", ...]
"""
response = self.llm(prompt)
return self.parse_subtasks(response)
def parse_subtasks(self, text):
# 假设返回 JSON
import json
return json.loads(text)
# =========================================
# 2️⃣ 水平扩展:并行 Worker Agents
# =========================================
def run_parallel_workers(subtasks, llm, tools):
def run_single(subtask):
agent = ReActAgent(llm, tools, role="worker")
return agent.run(subtask)
results = []
# 线程池模拟并行(实际可用 Ray / Async)
with ThreadPoolExecutor(max_workers=5) as executor:
futures = [executor.submit(run_single, t) for t in subtasks]
for f in futures:
results.append(f.result())
return results
# =========================================
# 3️⃣ 垂直收敛:Critic / Aggregator Agent
# =========================================
class CriticAgent(ReActAgent):
def run(self, task, results):
prompt = f"""
You are a critic and aggregator.
Original Task:
{task}
Candidate Results:
{results}
Please:
1. Evaluate correctness
2. Merge best parts
3. Give final answer
Return:
Final Answer:
"""
response = self.llm(prompt)
return self.extract_final(response)
# =========================================
# 4️⃣ 主调度器(核心:混合架构)
# =========================================
class MultiAgentOrchestrator:
def __init__(self, llm, tools):
self.llm = llm
self.tools = tools
def run(self, task):
# ===== Step 1:垂直拆解 =====
planner = PlannerAgent(self.llm)
subtasks = planner.run(task)
print("Subtasks:", subtasks)
# ===== Step 2:水平扩展 =====
results = run_parallel_workers(subtasks, self.llm, self.tools)
print("Parallel Results:", results)
# ===== Step 3:垂直收敛 =====
critic = CriticAgent(self.llm)
final_answer = critic.run(task, results)
return final_answer
# =========================================
# 使用示例
# =========================================
if __name__ == "__main__":
llm = lambda prompt: call_llm_api(prompt) # 伪函数
tools = {
"search": lambda q: f"search result for {q}",
"calc": lambda x: str(eval(x))
}
orchestrator = MultiAgentOrchestrator(llm, tools)
task = "分析特斯拉股价影响因素并给出投资建议"
result = orchestrator.run(task)
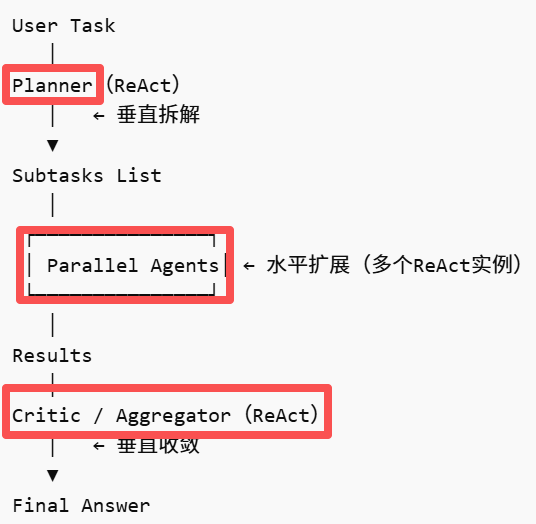
print("Final Answer:", result)这个架构本质上是基于 ReAct 的多智能体扩展:
首先通过 Planner Agent 做任务拆解(垂直拆解),然后将子任务分发给多个 Worker Agent 并行执行(水平扩展),每个 Worker 内部仍然是 ReAct 循环(Thought-Action-Observation),最后通过 Critic Agent 对结果进行评估与融合(垂直收敛)。