
利用手机IMU(低精度传感器)数据和GNSS定位实现姿态初始化,对比校准前后的轨迹误差
文章目录
程序介绍
本文所述的程序为MATLAB仿真代码,可直接运行,包运行成功。仿真模拟了低成本传感器(手机 I M U + G N S S IMU + GNSS IMU+GNSS)的UAV姿态初始化与误差评估框架,在存在陀螺偏置和GNSS噪声的条件下,验证基于"粗初始化 + 卡尔曼滤波"的姿态解算方法对姿态校正的效果。
整体功能结构
代码按典型导航系统处理流程组织,可划分为五个模块:
- 真实运动轨迹生成
- 传感器建模(IMU + GNSS)
- 姿态粗初始化( A l i g n m e n t Alignment Alignment)
- 卡尔曼滤波精化( B i a s Bias Bias估计 + 姿态融合)
- 轨迹重建与误差评估
关键建模与算法机制
通过周期函数构造三轴姿态:
- 航向角( Y a w Yaw Yaw):主导平面运动方向
- 俯仰角( P i t c Pitc Pitch):影响高度变化
- 横滚角( R o l l Roll Roll):影响侧向姿态
轨迹重建机制
利用滤波后的姿态替代真实姿态进行速度投影,再积分得到估计轨迹。
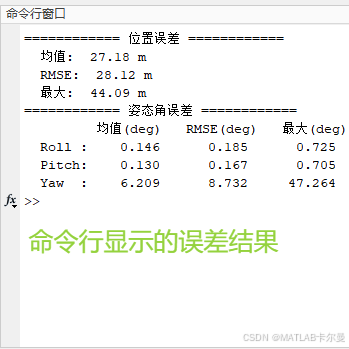
结果评估指标
对比指标:
- 平均误差
- RMSE
- 最大误差
绘图:
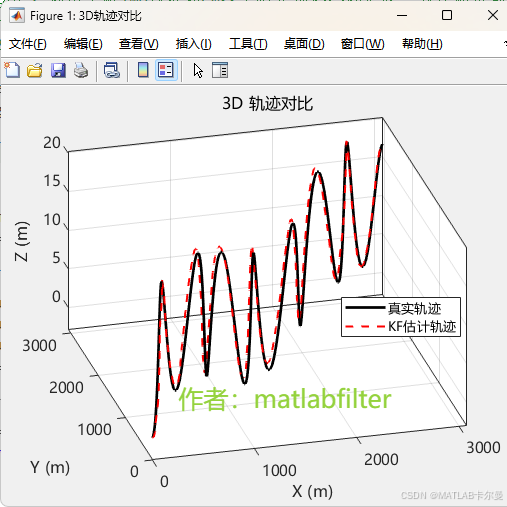
- 3D轨迹对比(直观体现漂移)
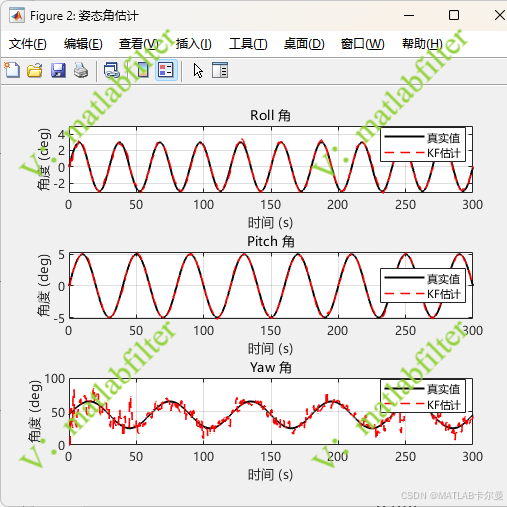
- 姿态估计 v s vs vs 真值
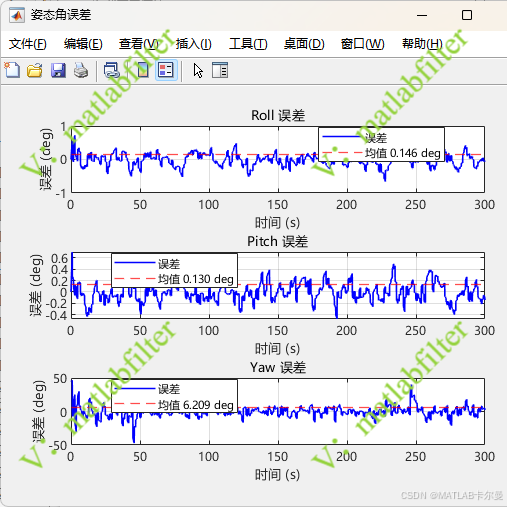
- 姿态误差曲线(含均值参考线)
运行结果
UAV运动轨迹示意图:
姿态角真值与估计值(校正后)对比:
校正误差曲线:
命令行窗口截图:
MATLAB源代码
部分代码如下:
matlab
%% UAV姿态初始化仿真 - 基于手机IMU和GNSS
% 功能: 利用手机IMU数据和GNSS定位实现姿态初始化,对比校准前后的轨迹误差
% 作者: matlabfilter
% 2026-03-29/Ver1
clear; clc; close all;
rng(0);
%% 仿真参数
dt = 0.1; % 时间步长 (s)
T = 300; % 仿真总时长 (s)
time = 0:dt:T;
N = length(time);
%% ===== 真实姿态(deg)=====
true_yaw = 45 + 20*sin(2*pi*time/60);
true_pitch = 5*sin(2*pi*time/40);
true_roll = 3*sin(2*pi*time/30);
v = 15 + 2*sin(2*pi*time/50); % 速度大小 (m/s)
%% ===== 真实轨迹 =====
x = zeros(1,N); y = zeros(1,N); z = zeros(1,N);
for i = 2:N
vx = v(i)*cosd(true_pitch(i))*cosd(true_yaw(i));
vy = v(i)*cosd(true_pitch(i))*sind(true_yaw(i));
vz = v(i)*sind(true_pitch(i));
x(i) = x(i-1) + vx*dt;
y(i) = y(i-1) + vy*dt;
z(i) = z(i-1) + vz*dt;
end完整代码:https://download.csdn.net/download/callmeup/92796734
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者