目标驱动的可控架构 (Goal-Driven Controllable Architecture) 是 AI 从"陪聊机器人"走向"全自动数字员工 (Agent)"的终极管理系统。
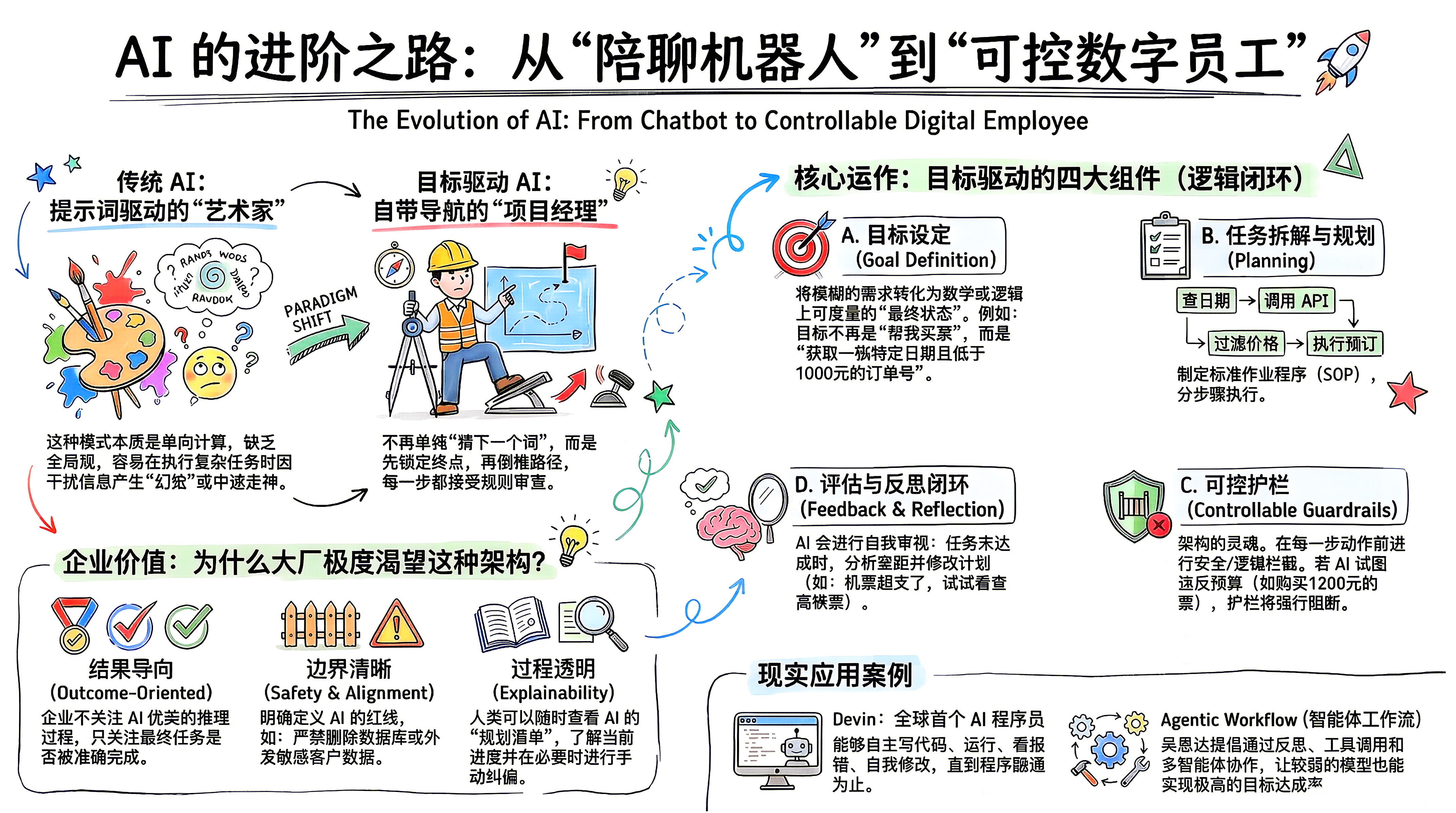
如果说传统的生成式大模型是一个**"才华横溢但思维发散的艺术家"** (走到哪画到哪); 那么目标驱动的可控架构就是一个**"极其自律、自带导航和刹车的** 项目经理 " 。
它不再单纯依赖"猜下一个词 (NTP)"来顺藤摸瓜,而是先锁定终点,再倒推路径,并且在每一步都接受严格的规则审查。
1.🎯 核心痛点:为什么传统的 AI "不可控"?
传统的 LLM 是**"提示词驱动 (Prompt-Driven)"** 的。
-
现象:你给它一个长篇大论的任务,它做到一半可能就"走神"了,或者因为某个微小的干扰信息,得出了完全错误的结论(幻觉)。
-
原因 :它本质上是一步一步往前走的单向计算,没有**"全局观"** 。如果中途偏离了航线,它自己很难拉回来。
目标驱动架构 的出现,就是为了解决 AI 的**"走神"** 和**"失控"** 问题。
2.⚙️ 它是怎么运作的?(四大核心组件)
这种架构通常包含一套严密的逻辑闭环,我们以"帮我预订下周去北京最便宜的机票,但预算不能超过 1000 元"为例:
A. 目标设定 (Goal Definition)
-
不再是简单的 Prompt ,系统会将用户的话转化为一个数学上或逻辑上可度量的最终状态 (End State)。
-
目标:获得一张北京机票的订单确认号。
-
约束:价格 <= 1000 元,时间 = 下周。
B. 任务拆解与规划 (Planning / Task Decomposition)
-
模型不会直接开始乱写代码,而是先制定 SOP (标准作业程序)。
-
计划:
-
查下周的日期。
-
调用携程 API 查机票。
-
过滤出 1000 元以下的。
-
执行预订。
-
C. 可控护栏 (Controllable Guardrails) ------ 架构的灵魂
-
这是**"可控 (Controllable)"** 的体现。在 AI 执行每一步之前,都会经过一个独立的安全/逻辑控制器进行拦截和审查 。
-
场景:AI 发现最便宜的机票是 1200 元,它可能试图动用用户的支付宝余额强行购买。
-
护栏启动:"警告!操作违反了'预算限制'规则,动作被阻断。"
D. 评估与反思闭环 (Feedback & Reflection)
-
传统的 LLM 生成完就结束了。目标驱动的 AI 会自我审视。
-
AI 反思 :"机票超预算了,买不了。距离目标状态还有差距。我需要修改计划:去查查有没有高铁票。"
3.🛡️ 为什么企业极度渴望这种架构?
目前,大企业(如银行、医疗、航空)不敢放手让 AI 去操作系统,核心原因就是怕它**"抽风"** 。
目标驱动的可控架构带来了三大保障:
-
结果导向 (Outcome-Oriented):老板不在乎 AI 写了多漂亮的推理过程,只在乎任务有没有完成。
-
边界清晰 (Safety & Alignment) :明确定义了 AI "绝对不能做什么"(比如:绝对不能删除数据库,绝对不能把客户数据发给外网)。
-
过程透明 (Explainability):人类可以随时介入它的"规划清单",看到它目前卡在了哪一步,并进行手动纠偏。
4.🌟 现实中的代表
目前业界最前沿的 Agent 系统都在采用这种架构:
-
Devin (全球首个 AI 程序员):你给它一个目标("帮我写个贪吃蛇网页"),它自己写代码、自己运行、自己看报错信息、自己修改,直到网页成功跑起来为止。
-
吴恩达 (Andrew Ng) 提倡的 Agentic Workflow ( 智能体 工作流 ):通过反思 (Reflection)、工具调用 (Tool Use) 和多智能体协作 (Multi-Agent),用相对较弱的模型,实现了超越 GPT-4 的目标达成率。
总结
目标驱动的可控架构 标志着 AI 从**"文本生成器"** 向**"自动化行动引擎"** 的蜕变。
它用控制论 的思想,给大语言模型套上了缰绳,让 AI 从一个发散思维的聊天机器,变成了真正能够替人类打工、并且绝对听指挥的数字劳动力。