包含:
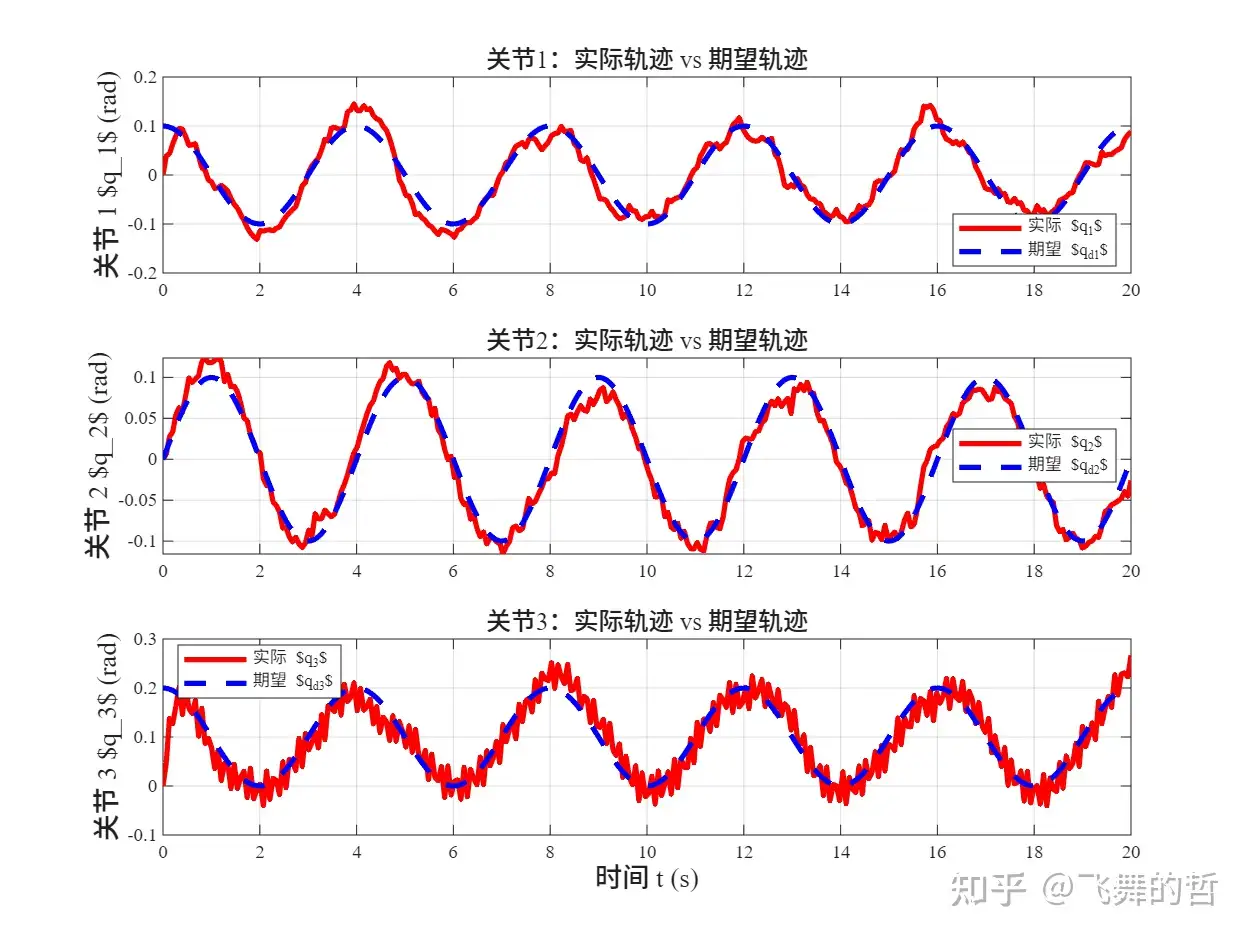
- 轨迹生成:生成平滑的期望运动轨迹
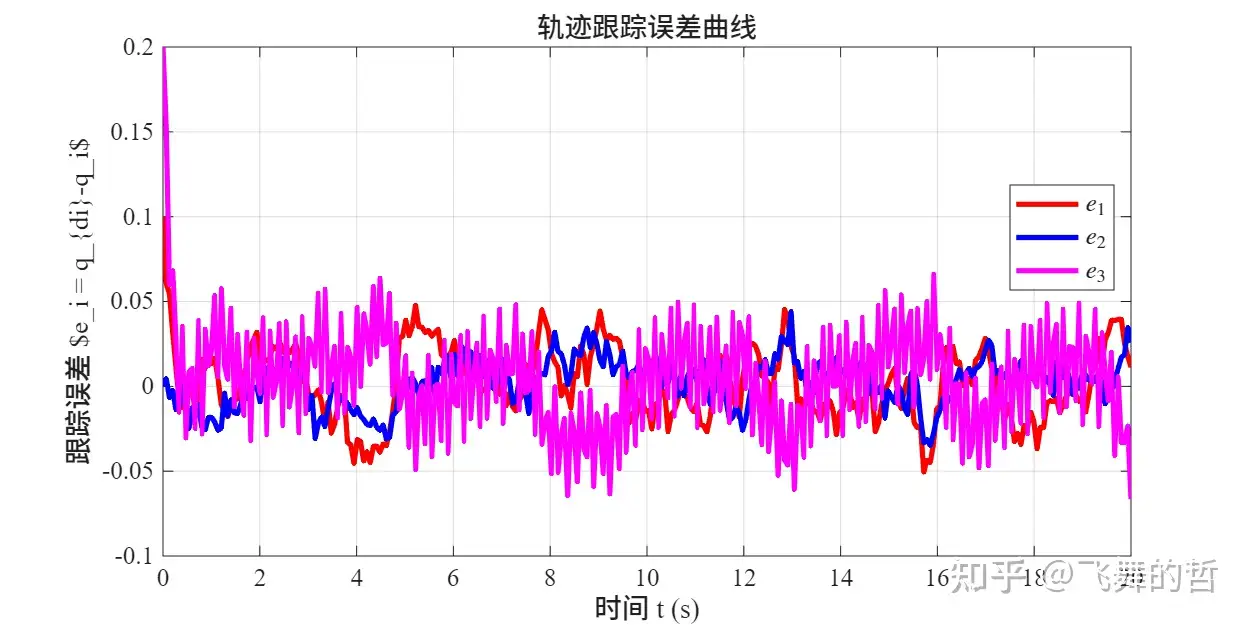
- 跟踪误差计算:计算机械臂实际位置与期望位置的误差
- 动力学建模:建立 3 连杆机械臂的质量矩阵、科氏力、重力项
- RBF 神经网络补偿:用神经网络逼近模型不确定性和扰动
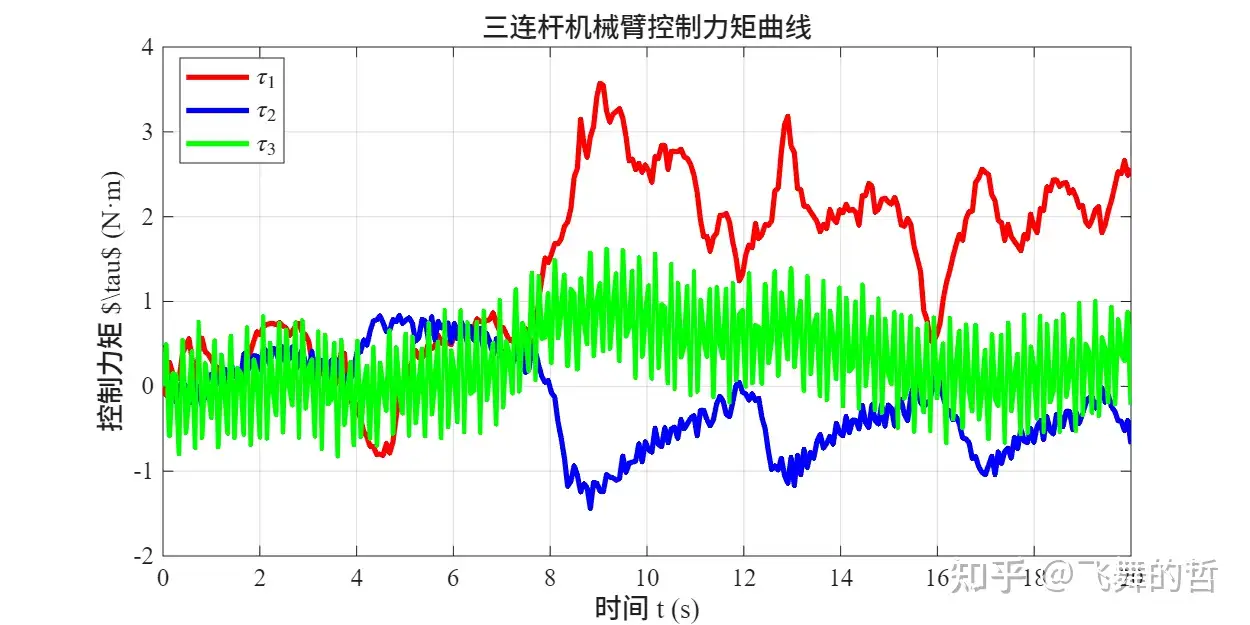
- 自适应控制律:设计控制力矩,让误差收敛到 0
- 状态微分方程:输出状态导数,供 ODE 求解
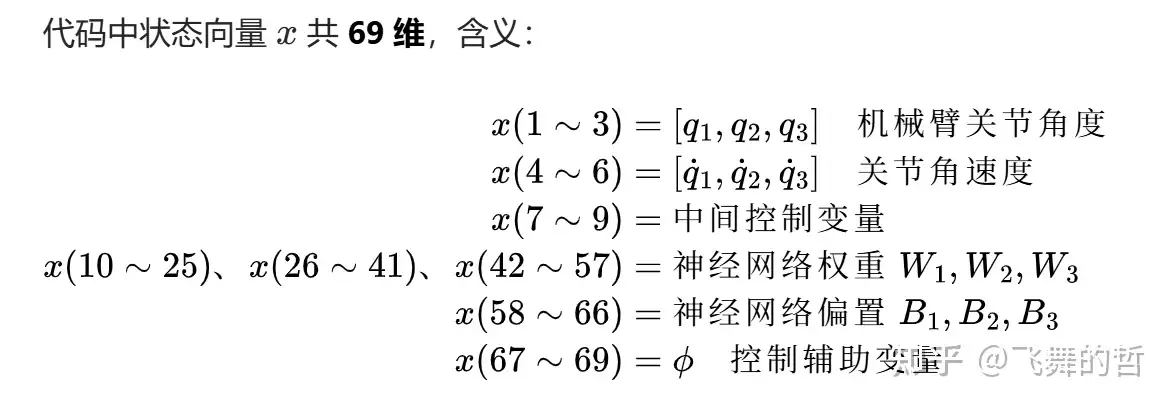
1.状态量定义:
2.期望轨迹:

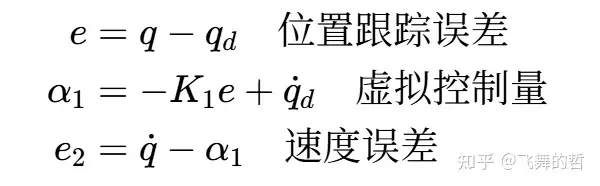
3.反步控制
4.动力学模型

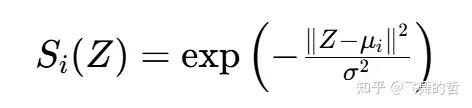
5.神经网络自适应补偿


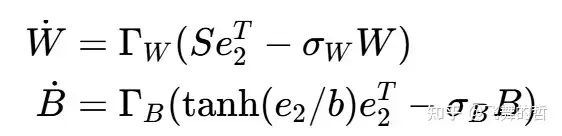
6.权重自适应率
作者简介:长期从事机器人/控制/规划/数学建模领域相关研究,涉及机械臂、轮式机器人、四足机器人、移动机械臂、轮足、机械双臂的建模及控制仿真。 接机器人/控制/规划领域毕业论文辅导 无论你是想入门避障、轨迹规划、轨迹优化、机械臂协同、人机协作、机器人轨迹跟踪,还是完全看不懂文献、对未来比较迷茫或者找工作不知如何下手,我都能提供专业建议,助你少走弯路。高效完成科研。 欢迎交流、讨论,3531225003@qq.com