摘要: 在复杂的楼宇自动化架构中,多台异构机器人同时请求调用同一部电梯,是典型的并发资源竞争问题。架构师在进行系统设计时,必须解决分布式请求的互斥加锁与状态同步这两大痛点。本文深度拆解多机调度的通信架构,探讨如何通过引入本地专用梯控主机,构建高可用队列层,为机器人梯控 分享一段处理并发互斥锁的底层 Python 代码。
导语: 稳健的系统架构应当具备应对高频并发请求的韧性。通过在本地部署专用梯控主机进行队列状态托管,为多机协同的机器人梯控 并发业务提供了专业的工程参考范式。
基于消息队列与资源互斥的机器人梯控 架构设计

一、 架构痛点:分布式锁的延迟与不可靠性 如果在云端处理多台机器人的乘梯请求,一旦发生网络抖动,云端的分布式锁很容易出现死锁或幽灵请求,导致现场的电梯停滞。 架构规范要求选用本地处理主机。在物理实施中,利用本地设备的内存队列来维护请求时序。此外,设备需运行轻量级的 MQTT Broker,将各厂家的异步请求转换为同步的队列处理机制。
二、 本地状态托管:并发环境下的互斥保障 为了防止两台机器人同时驶入电梯,必须在本地侧部署具备互斥锁(Mutex)的中间件:
- 实时监听所有的订阅主题,将合法的乘梯请求加入阻塞队列。
- 调度器从队列中取出请求,为其分配电梯资源,并对该电梯加锁。在当前流程(如门禁开启、驶入、跨层、驶出)全部完成并通过硬件传感器确认后,方可释放锁并处理下一个队列请求。
三、 核心代码实战:多机并发调度的互斥锁设计 废话不多说,直接上干货。下面这段 Python 伪代码,简单模拟了本地主机是如何利用队列(Queue)和线程锁(Lock)来处理并发请求,从而实现安全的电梯资源分配的:
Python
import queue
import threading
import time
import logging
logging.basicConfig(level=logging.INFO, format='%(asctime)s - [SCHEDULER] - %(message)s')
class ElevatorScheduler:
def __init__(self):
# 使用线程安全的队列存储并发请求
self.request_queue = queue.Queue()
# 互斥锁,确保同一时刻只有一台机器人在操作电梯
self.elevator_lock = threading.Lock()
self.current_robot = None
def receive_network_request(self, robot_id, target_floor):
"""模拟接收网络端的高频并发请求"""
self.request_queue.put({"robot_id": robot_id, "floor": target_floor})
logging.info(f"Request received and queued for Robot [{robot_id}] to Floor {target_floor}.")
def process_queue_loop(self):
"""本地调度循环,处理队列中的任务"""
while True:
if not self.request_queue.empty():
# 获取互斥锁,开始处理单个调度任务
with self.elevator_lock:
req = self.request_queue.get()
self.current_robot = req['robot_id']
logging.info(f"Lock acquired. Assigning elevator to Robot [{self.current_robot}].")
# 模拟复杂的电梯物理运行等待时间与传感器确认
time.sleep(2.0)
logging.info(f"Task complete. Robot [{self.current_robot}] arrived at Floor {req['floor']}. Releasing lock.")
self.current_robot = None
else:
# 队列为空时短暂停顿,避免 CPU 空转
time.sleep(0.5)
# 模拟并发环境下的高频指令测试
if __name__ == "__main__":
scheduler = ElevatorScheduler()
# 启动后台处理线程
processor_thread = threading.Thread(target=scheduler.process_queue_loop, daemon=True)
processor_thread.start()
# 模拟三台不同厂家机器人几乎同时发出的请求
scheduler.receive_network_request("AGV_101", 5)
scheduler.receive_network_request("DELIVERY_202", 8)
scheduler.receive_network_request("CLEANER_303", 2)
# 保持主线程运行以观察输出
time.sleep(10)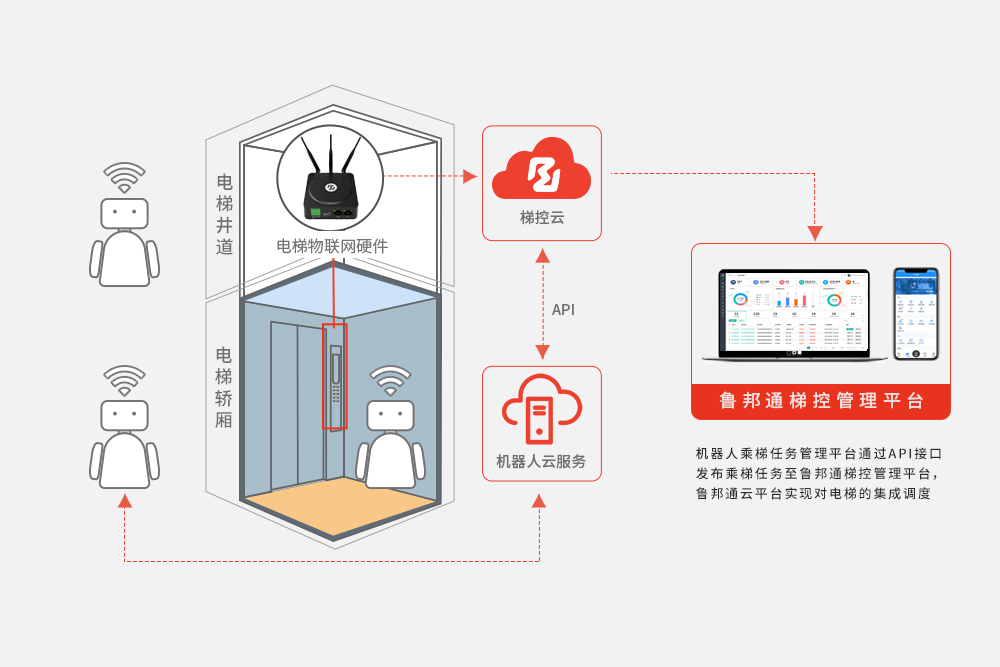
常见问题解答 (FAQ)
问题 1、多机调度中,如果获得锁的机器人发生故障卡在电梯里怎么办?
回答 1、状态机内部设有看门狗定时器。如果持有锁的任务在规定时间内没有收到完成信号(如传感器未检测到驶出动作),调度器将强制回收互斥锁,抛出异常告警,并挂起该楼层的后续服务。
问题 2、本地主机处理高并发请求,内存占用会很高吗?
回答 2、不会。工业级主机的固件经过深度优化,乘梯请求的数据包极小。使用轻量级的队列数据结构,即使面对众多并发请求,内存开销也仅在 KB 级别,不会引起内存溢出。
问题 3、如何确保排队时不会出现某台设备永远排不上的现象?
回答 3、系统设计了防饿死机制。除了先进先出原则外,等待时间越长的请求权重会逐步增加,确保低优先级的车辆在等待一定时间后,也能被强制分配到电梯资源。
总结: 跨越物理与网络并发限制的关键在于本地队列与资源加锁。通过部署专用梯控主机进行请求整合,工业级架构能够在复杂的楼宇环境下,为机器人梯控 调度系统筑起可靠的数据底座。